






接上继续学习,手动操纵机器人共有三种模式:单轴运动,线性运动和重定位运动。
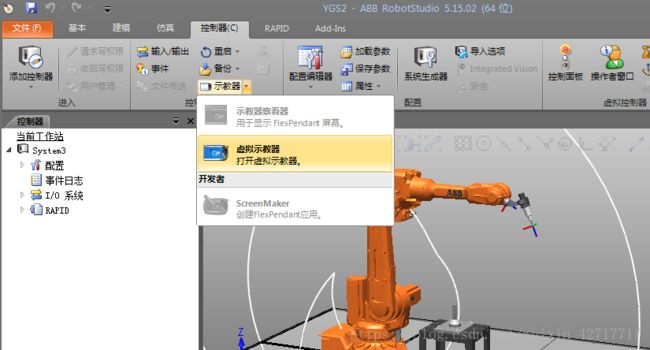
1.单轴运动:一般的,ABB机器人是由六个伺服电机分别驱动机器人的六个关节轴,每次手动操纵一个关节轴的运动,称之为单轴运动。点击控制器-->示教器-->虚拟示教器
打开虚拟控制面板,将钥匙开关打到手动限速模式:

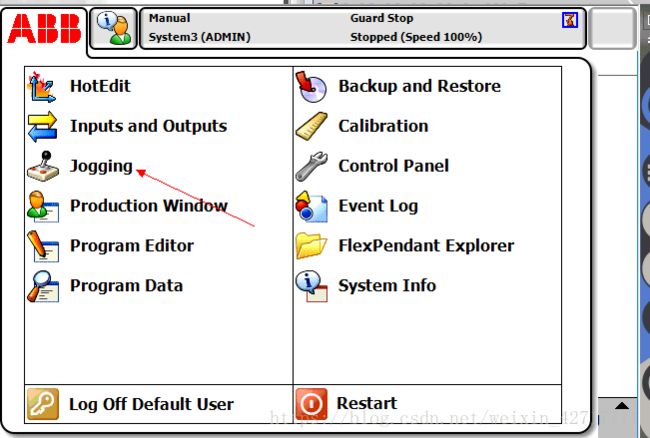
在示教器主界面中选择手动操纵
选择动作模式,默认的为1-3轴
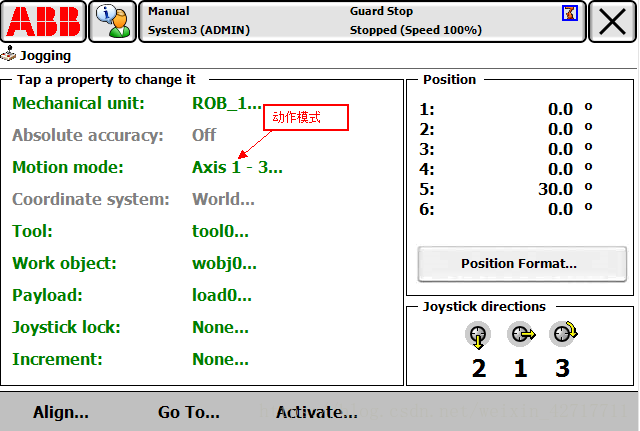
点进去之后可以看到下面有四个选项,分别为1-3轴

 接上继续学习,手动操纵机器人共有三种模式:单轴运动,线性运动和重定位运动。1.单轴运动:一般的,ABB机器人是由六个伺服电机分别驱动机器人的六个关节轴,每次手动操纵一个关节轴的运动,称之为单轴运动。点击控制器-->示教器-->虚拟示教器 打开虚拟控制面板,将钥匙开关打到手动限速模式: 在示教器主界面中选择手动操纵 选择动作模式,默认的为1-3轴 点进去之后可以看到下面有四个选项,分别为...
接上继续学习,手动操纵机器人共有三种模式:单轴运动,线性运动和重定位运动。1.单轴运动:一般的,ABB机器人是由六个伺服电机分别驱动机器人的六个关节轴,每次手动操纵一个关节轴的运动,称之为单轴运动。点击控制器-->示教器-->虚拟示教器 打开虚拟控制面板,将钥匙开关打到手动限速模式: 在示教器主界面中选择手动操纵 选择动作模式,默认的为1-3轴 点进去之后可以看到下面有四个选项,分别为...
接上继续学习,手动操纵机器人共有三种模式:单轴运动,线性运动和重定位运动。
1.单轴运动:一般的,ABB机器人是由六个伺服电机分别驱动机器人的六个关节轴,每次手动操纵一个关节轴的运动,称之为单轴运动。点击控制器-->示教器-->虚拟示教器
打开虚拟控制面板,将钥匙开关打到手动限速模式:
在示教器主界面中选择手动操纵
选择动作模式,默认的为1-3轴
点进去之后可以看到下面有四个选项,分别为1-3轴
 1071
1071











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















