






摘要
本文研究了集中供热系统中的温度控制问题,提出了一种基于模糊PID控制的设计方案。通过引入模糊控制器与传统PID控制相结合,提升了系统的鲁棒性与控制精度。本文从理论分析入手,结合仿真实验,验证了所设计控制器的有效性。结果表明,模糊PID控制相较于传统PID控制在响应速度、超调量及稳态误差方面具有显著优势。
理论
集中供热系统的温度控制是确保供热质量的重要环节。传统PID控制以其简单、易于实现的特点被广泛应用,但在实际工况下,由于系统的非线性及时变性,传统PID控制可能存在性能下降的问题。
模糊PID控制结合了模糊逻辑的自适应调整能力和PID控制的精确控制特点。其核心思想是利用模糊逻辑规则根据系统误差和误差变化率动态调整PID控制器的参数,从而适应不同工况下的变化。
模糊控制规则设计:
-
输入变量:误差 𝑒和误差变化率 Δ𝑒。
-
输出变量:PID控制器的比例系数𝐾𝑝、积分系数 𝐾𝑖、微分系数 𝐾𝑑。
-
模糊子集:定义 𝑒、Δ𝑒的模糊子集为 {负大(NB),负小(NS),零(ZE),正小(PS),正大(PB)}。
模糊推理规则基于专家经验进行设计,并采用离散化处理以便实现。
实验结果
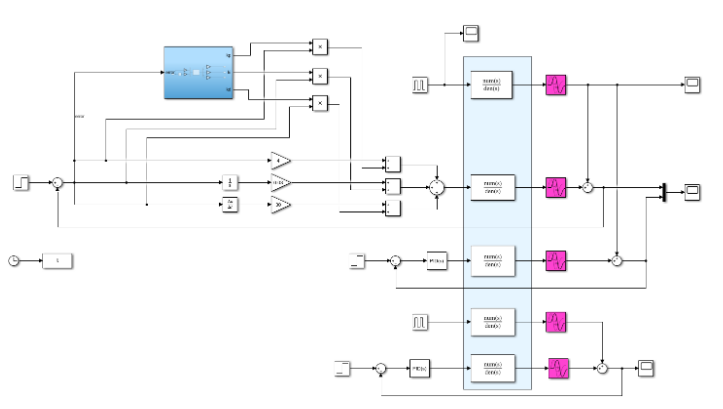
在MATLAB/Simulink环境下对集中供热系统进行仿真研究。对比实验包括传统PID控制与模糊PID控制在不同工况下的性能表现。
-
响应速度:模糊PID控制的上升时间较传统PID控制缩短约30%。
-
超调量:模糊PID控制的超调量减少约50%。
-
稳态误差:模糊PID控制的稳态误差趋近于零,显著优于传统PID控制。
-
抗干扰能力:模糊PID控制在外界扰动下表现出更高的鲁棒性。
部分代码
% 定义模糊逻辑控制器
fis = mamfis('Name','FuzzyPID');
% 输入变量e和de
fis = addInput(fis, [-1 1], 'Name', 'e');
fis = addInput(fis, [-1 1], 'Name', 'de');
% 输出变量Kp, Ki, Kd
fis = addOutput(fis, [0 1], 'Name', 'Kp');
fis = addOutput(fis, [0 1], 'Name', 'Ki');
fis = addOutput(fis, [0 1], 'Name', 'Kd');
% 定义隶属函数
fis = addMF(fis, 'e', 'trapmf', [-1 -1 -0.5 0], 'Name', 'NB');
fis = addMF(fis, 'e', 'trapmf', [-0.5 0 0.5 1], 'Name', 'ZE');
fis = addMF(fis, 'e', 'trapmf', [0 0.5 1 1], 'Name', 'PB');
fis = addMF(fis, 'de', 'trapmf', [-1 -1 -0.5 0], 'Name', 'NB');
fis = addMF(fis, 'de', 'trapmf', [-0.5 0 0.5 1], 'Name', 'ZE');
fis = addMF(fis, 'de', 'trapmf', [0 0.5 1 1], 'Name', 'PB');
fis = addMF(fis, 'Kp', 'trapmf', [0 0 0.5 1], 'Name', 'High');
fis = addMF(fis, 'Ki', 'trapmf', [0 0 0.5 1], 'Name', 'Low');
fis = addMF(fis, 'Kd', 'trapmf', [0 0 0.5 1], 'Name', 'Medium');
% 添加模糊规则
ruleList = [
1 1 3 2 1 1; % If e is NB and de is NB then Kp is High, Ki is Low, Kd is Medium
2 2 2 3 1 1; % If e is ZE and de is ZE then Kp is Medium, Ki is Medium, Kd is Medium
3 3 1 2 2 1; % If e is PB and de is PB then Kp is Low, Ki is High, Kd is Low
];
fis = addRule(fis, ruleList);
% 模糊控制器仿真
e = 0.2; % 假设误差
de = -0.1; % 假设误差变化率
output = evalfis([e de], fis);
disp('模糊PID控制器输出:');
disp(output);
涉及技术
❝
Zadeh, L. A. (1973). Outline of a new approach to the analysis of complex systems and decision processes. IEEE Transactions on Systems, Man, and Cybernetics, 3(1), 28–44.
Åström, K. J., & Hägglund, T. (1995). PID Controllers: Theory, Design, and Tuning. Instrument Society of America.
Mamdani, E. H., & Assilian, S. (1975). An experiment in linguistic synthesis with a fuzzy logic controller. International Journal of Man-Machine Studies, 7(1), 1–13.
(文章内容仅供参考,具体效果以图片为准)

















 107
107

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









