








网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
本人邮箱:sylvester0510@163.com,欢迎交流讨论,
欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/
一、摘要
ORB-SLAM是由Raul Mur-Artal,J. M. M. Montiel和Juan D. Tardos于2015年发表在IEEE Transactions on Robotics。项目主页网址为:http://webdiis.unizar.es/~raulmur/orbslam/。
ORB-SLAM是一个基于特征点的实时单目SLAM系统,在大规模的、小规模的、室内室外的环境都可以运行。该系统对剧烈运动也很鲁棒,支持宽基线的闭环检测和重定位,包括全自动初始化。该系统包含了所有SLAM系统共有的模块:跟踪(Tracking)、建图(Mapping)、重定位(Relocalization)、闭环检测(Loop closing)。由于ORB-SLAM系统是基于特征点的SLAM系统,故其能够实时计算出相机的轨线,并生成场景的稀疏三维重建结果。ORB-SLAM2在ORB-SLAM的基础上,还支持标定后的双目相机和RGB-D相机。
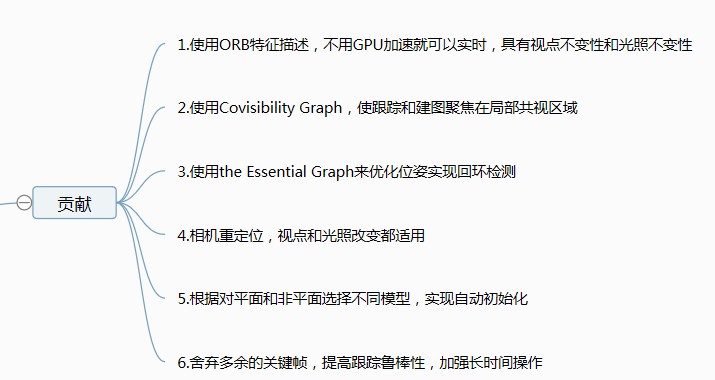
二、ORB-SLAM的贡献:
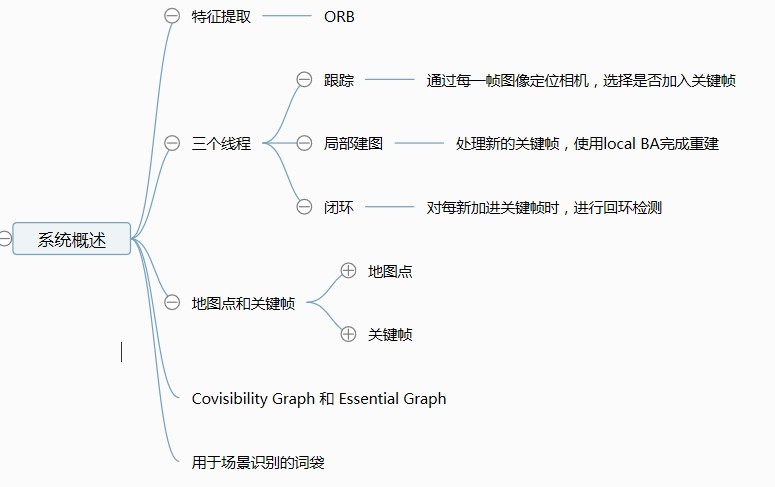
三、系统架构
ORB-SLAM其中的关键点如下图所示:
可以看到ORB-SLAM主要分为三个线程进行,也就是论文中的下图所示的,分别是Tracking、LocalMapping和LoopClosing。ORB-SLAM2的工程非常清晰漂亮,三个线程分别存放在对应的三个文件中,分别是Tracking.cpp、LocalMapping.cpp和LoopClosing.cpp文件中,很容易找到。
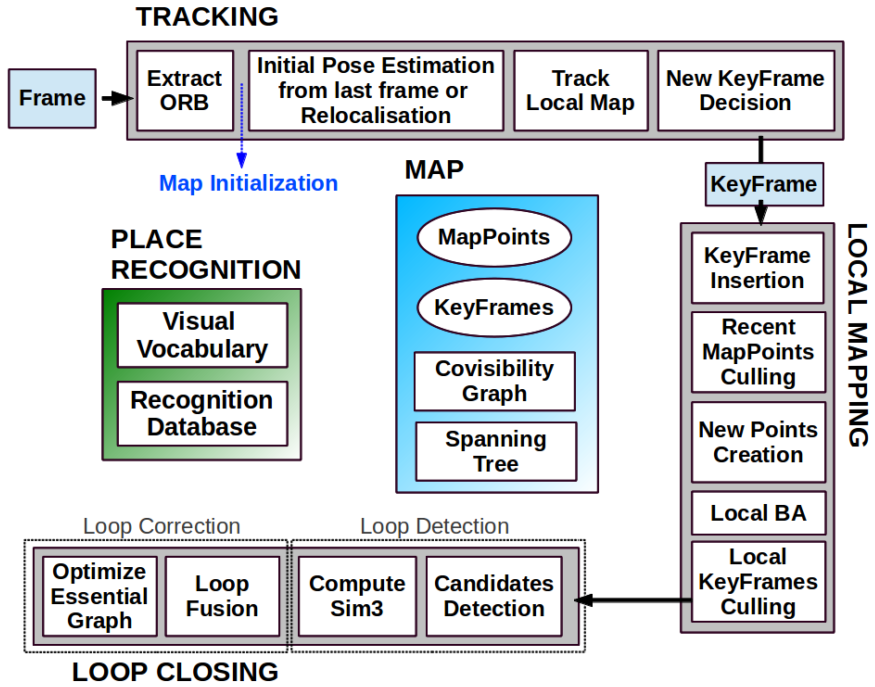
(1)跟踪(Tracking)
这一部分主要工作是从图像中提取ORB特征,根据上一帧进行姿态估计,或者进行通过全局重定位初始化位姿,然后跟踪已经重建的局部地图,优化位姿,再根据一些规则确定新的关键帧。
既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上C C++开发知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新
需要这些资料,可以戳这里获取](https://bbs.csdn.net/topics/618668825)**















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









