







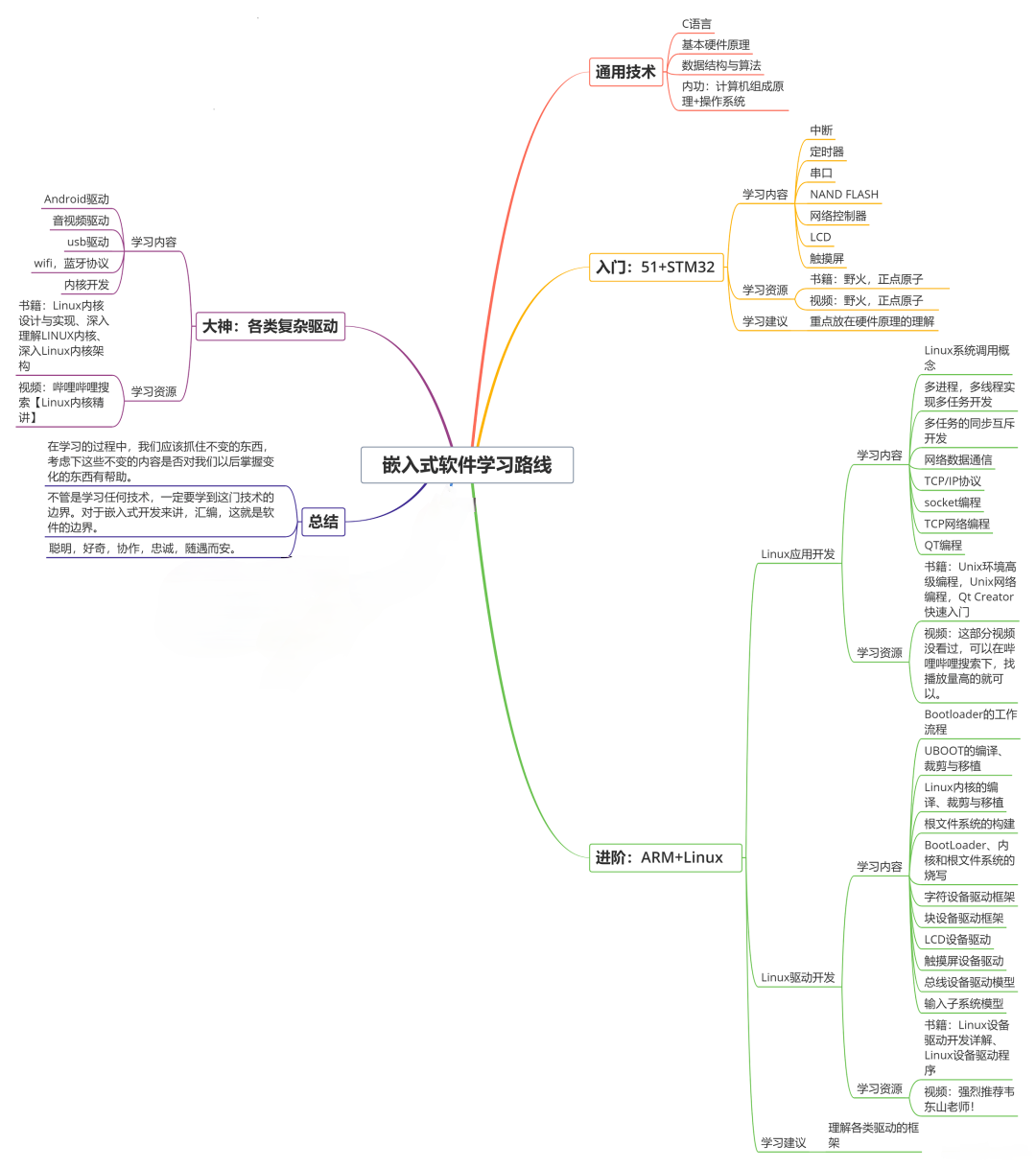
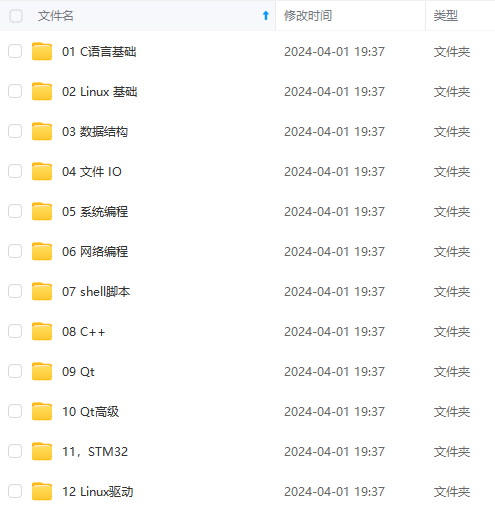
收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
% params for function [path_smooth] = smooth(map, path, vertices, delta)
delta = 5;
[vertices, edges, path] = rrt(map, q_start, q_goal, k, delta_q, p);
path_smooth = smooth(map, path, vertices, delta);
imshow(int32(1 - map), []);
title('RRT (Rapidly-Exploring Random Trees) - Smooth');
% imagesc(1 - map);
% colormap(gray);
hold on;
[edgesRowCount, ~] = size(edges);
for ii = 1 : edgesRowCount
plot(vertices(ii, 1), vertices(ii, 2), 'cyan*', 'linewidth', 1);
plot([vertices(edges(ii, 1), 1), vertices(edges(ii, 2), 1)], ...
[vertices(edges(ii, 1), 2), vertices(edges(ii, 2), 2)], ...
'b', 'LineWidth', 1);
end
plot(q_start(1), q_start(2), 'g*', 'linewidth', 1);
plot(q_goal(1), q_goal(2), 'r*', 'linewidth', 1);
[~, pathCount] = size(path);
for ii = 1 : pathCount - 1
%plot(vertices(ii, 1), vertices(ii, 2), 'cyan*', 'linewidth', 1);
plot([vertices(path(ii), 1), vertices(path(ii + 1), 1)], ...
[vertices(path(ii), 2), vertices(path(ii + 1), 2)], ...
'r', 'LineWidth', 1);
end
[~, pathCount] = size(path_smooth);
for ii = 1 : pathCount - 1
%plot(vertices(ii, 1), vertices(ii, 2), 'cyan*', 'linewidth', 1);
plot([vertices(path_smooth(ii), 1), vertices(path_smooth(ii + 1), 1)], ...
[vertices(path_smooth(ii), 2), vertices(path_smooth(ii + 1), 2)], ...
'black', 'LineWidth', 2);
end
//rrt.m
function [vertices, edges, path] = rrt(map, q_start, q_goal, k, delta_q, p)
%Algorithm to build a tree to solve map
% that goes from the start position till the goal position and to generate a path that connects
% both vertices
%
% map: matrix that you can obtain loading the mat files.
%
% q_start: coordinates x and y of the start position. You can find the coordinates below the figures
% of the environmentin the previous page.
%
% q_goal: coordinates x and y of the goal position. You can find the coordinates below the figures
% of the environment in the previous page.
%
% k: maximum number of samples that will be considered to generate the tree, if the goal is not
% found before.
%
% delta_q: distance between q_new and q_near.
%
% p: probability (between 0 and 1) of choosing q_goal as q_random.
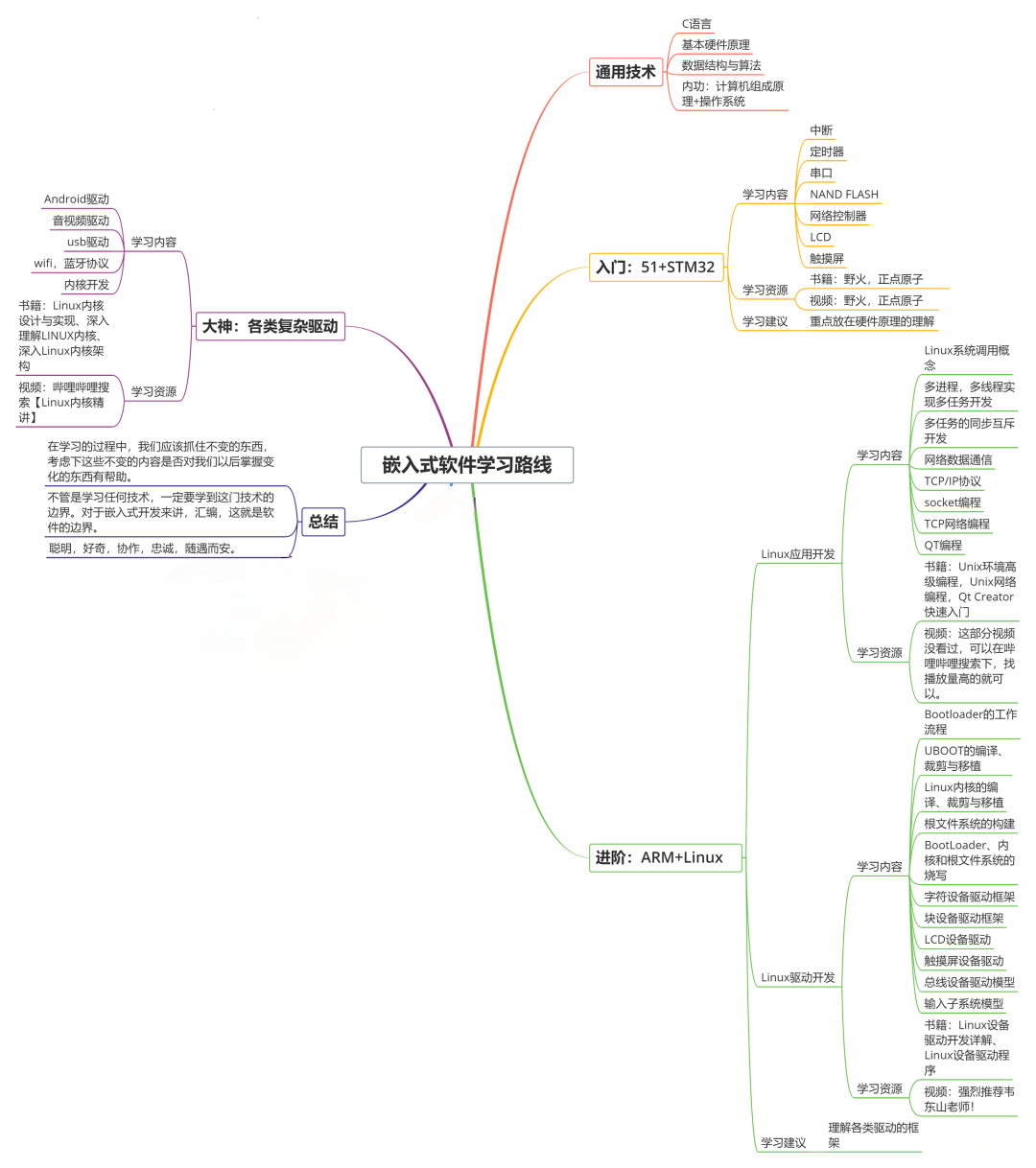
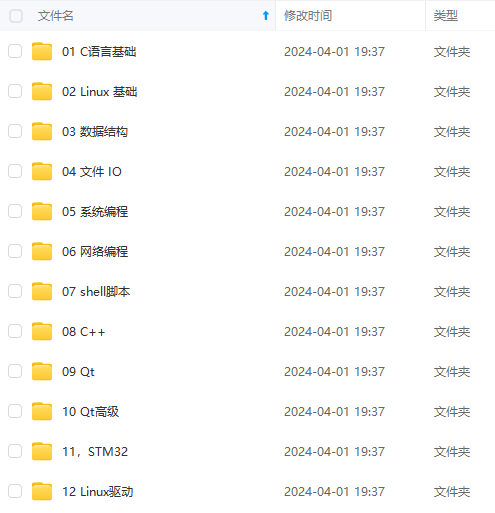
收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人**
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!















 2746
2746

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









