








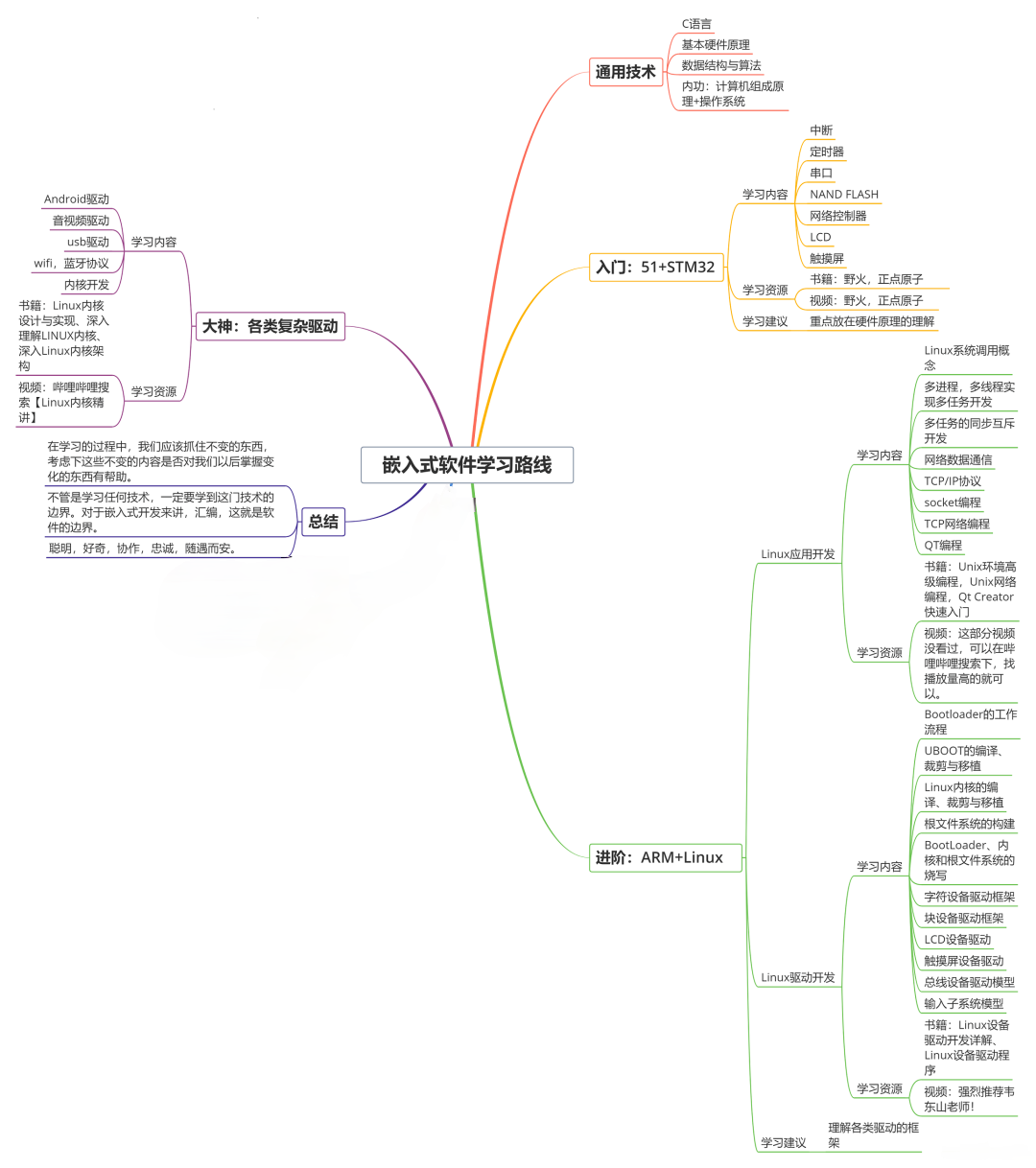
既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上物联网嵌入式知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、电子书籍、讲解视频,并且后续会持续更新
(3)修改延时初始化函数`delay_init()`;
void delay_init()
{
u32 reload;
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK);//选择外部时钟 HCLK
fac_us=SystemCoreClock/1000000; //不论是否使用OS,fac_us都需要使用
reload=SystemCoreClock/1000000; //每秒钟的计数次数 单位为M
reload*=1000000/configTICK_RATE_HZ; //根据configTICK_RATE_HZ设定溢出时间
//reload为24位寄存器,最大值:16777216,在72M下,约合0.233s左右
fac_ms=1000/configTICK_RATE_HZ; //代表OS可以延时的最少单位
SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk; //开启SYSTICK中断
SysTick->LOAD=reload; //每1/configTICK\_RATE\_HZ秒中断一次
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //开启SYSTICK
}
(4)修函数`delay_us()`;
void delay_us(u32 nus)
{
u32 ticks;
u32 told,tnow,tcnt=0;
u32 reload=SysTick->LOAD; //LOAD的值
ticks=nus*fac_us; //需要的节拍数
told=SysTick->VAL; //刚进入时的计数器值
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
if(tnow<told)tcnt+=told-tnow; //这里注意一下SYSTICK是一个递减的计数器就可以了.
else tcnt+=reload-tnow+told;
told=tnow;
if(tcnt>=ticks)break; //时间超过/等于要延迟的时间,则退出.
}
};
}
(4)修函数`delay_ms()`;
void delay_ms(u32 nms)
{
if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系统已经运行
{
if(nms>=fac_ms) //延时的时间大于OS的最少时间周期
{
vTaskDelay(nms/fac_ms); //FreeRTOS延时
}
nms%=fac_ms; //OS已经无法提供这么小的延时了,采用普通方式延时
}
delay_us((u32)(nms*1000)); //普通方式延时
}
(4)添加函数`delay_xms()`,记得到头文件声明;
//延时nms,不会引起任务调度
//nms:要延时的ms数
void delay_xms(u32 nms)
{
u32 i;
for(i=0;i<nms;i++) delay_us(1000);
}
### 4.4修改stm32f10x\_it.c文件
将如下代码都注释掉
//void SVC_Handler(void)
//{
//}
//void PendSV_Handler(void)
//{
//}
//
//void SysTick_Handler(void)
//{
//
### 4.5修改FreeRTOSConfig.h文件
这个文件在库函数的跑马灯实验中没有,FreeRTOS源码的source文件中也没有,需要自己到FreeRTOS源码中的demo文件夹中找到一个,并复制下来粘贴到工程中FreeRTOS的include文件夹里。
打开`FreeRTOSConfig.h`文件,在最后添加三行代码
#define xPortPendSVHandler PendSV_Handler
#define vPortSVCHandler SVC_Handler
#define INCLUDE_xTaskGetSchedulerState 1
我在移植的过程中就是少了这个,开发手册上没有写要添加。然后跑马灯没有实现出来,在一个博主那里看到的,添加后就成了。
### 4.6修改FreeRTO.h文件
将这两处的代码改为`1`;
#ifndef INCLUDE_xTaskGetSchedulerState
#define INCLUDE_xTaskGetSchedulerState 1 /*修改日期:2021.9.25*/
#endif
#ifndef INCLUDE_xTaskGetCurrentTaskHandle
#define INCLUDE_xTaskGetCurrentTaskHandle 1 /*修改日期:2021.9.25*/
#endif
### 4.7修改main.c文件的代码
(1)添加头文件`#include "FreeRTOS.h"`;
(2)添加头文件`#include "task.h"`;
(3)代码如下:
//任务优先级
#define START_TASK_PRIO 1
//任务堆栈大小
#define START_STK_SIZE 128
//任务句柄
TaskHandle_t StartTask_Handler;
//任务函数
void start_task(void *pvParameters);
//任务优先级
#define LED0_TASK_PRIO 2
//任务堆栈大小
#define LED0_STK_SIZE 50
//任务句柄
TaskHandle_t LED0Task_Handler;
//任务函数
void led0_task(void *pvParameters);
//任务优先级
#define LED1_TASK_PRIO 3
//任务堆栈大小
#define LED1_STK_SIZE 50
//任务句柄
TaskHandle_t LED1Task_Handler;
//任务函数
void led1_task(void *pvParameters);
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组4
delay_init(); //延时函数初始化
uart_init(115200); //初始化串口
LED_Init(); //初始化LED
//创建开始任务
xTaskCreate((TaskFunction_t )start_task, //任务函数
(const char\* )"start\_task", //任务名称
(uint16_t )START\_STK\_SIZE, //任务堆栈大小
(void\* )NULL, //传递给任务函数的参数
(UBaseType_t )START\_TASK\_PRIO, //任务优先级
(TaskHandle_t\* )&StartTask_Handler); //任务句柄
vTaskStartScheduler(); //开启任务调度
}
//开始任务任务函数
收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
[外链图片转存中…(img-Dj7HcF6H-1715654318227)]
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!















 697
697











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









