






文章目录
前言
书接上回,本案例希望建立一个UNET网络模型,来实现对农业遥感图像语义分割的任务。在上篇博文中已经对数据集进行了详细介绍,同时实现了数据筛选、数据集划分等预处理操作,同时对UNET网络模型举了一个详细的例子进行介绍。本篇博客将在处理后的数据集基础上,通过pytorch搭建该网络模型,并实现模型的训练与验证。
1.数据集介绍
为了更好的了解本篇博客,这里对处理后的数据集进行简单的介绍。
1.1文件类型介绍
本篇博客用的数据集在dataset/0.9/目录下,该目录下有两个文件夹和两个文本文档
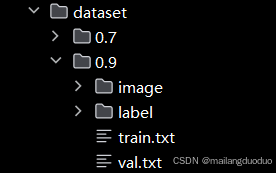
image:存放原始图像(即模型输入图像)label:存放原始图像对应的标签(即语义分割任务的掩码)train.txt:每一行代表训练集的图像名称val.txt:每一行代表验证集的图像名称
注:此处的验证集发挥的功能并不是调整模型超参数的,而是衡量模型的泛化性能,防止过拟合,即测试集的功能。后文所述测试集或者验证集均是代表该文件
1.2数据及标签介绍
数据集(image和label)共计251对原始图像和对应的标签,被划分成训练集(175张)和测试集(76张),即train.txt有175行,val.txt有76行。
- 原始图像:3×512×512,即彩色(三通道)图像
- 标签图像:1×512×512,即单通道灰度图像
每个像素点值表示原始图片中对应位置所属类别,本数据集共计四个类别,分别用像素值0,1,2,3代表。
这里随机选取一对照片进行举例,代码如下:
import matplotlib.pyplot as plt
train=plt.imread('dataset/0.9/image/16213.png')
label=plt.imread('dataset/0.9/label/16213.png')
plt.figure(figsize=(10, 5))
plt.subplot(121)
plt.imshow(train)
plt.axis('off')
plt.subplot(122)
plt.imshow(label)
plt.axis('off')
plt.show()
运行结果:

注:此处使用了matplotlib库中的彩色映射机制进行可视化输出,真实标签值属于集合{0,1,2,3}。
2.UNET网络模型搭建
2.1模型分析
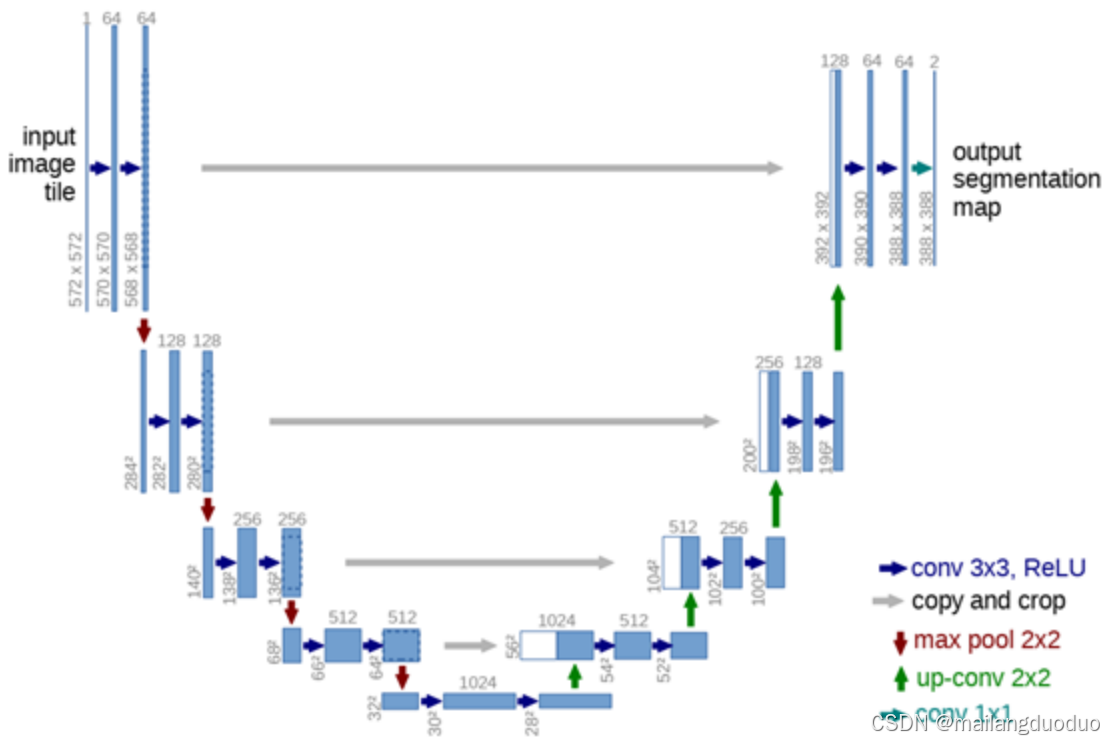
因为原始图像和标签的尺寸大小均为512×512,所以并不能直接使用上篇博客介绍的网络模型。因为该网络结构输入图像尺寸为1×572×572的单通道图像,经过网络模型处理,得到的输出为2×388×388的双通道图像,属于二分类的语义分割模型,和本案例有一定差距。
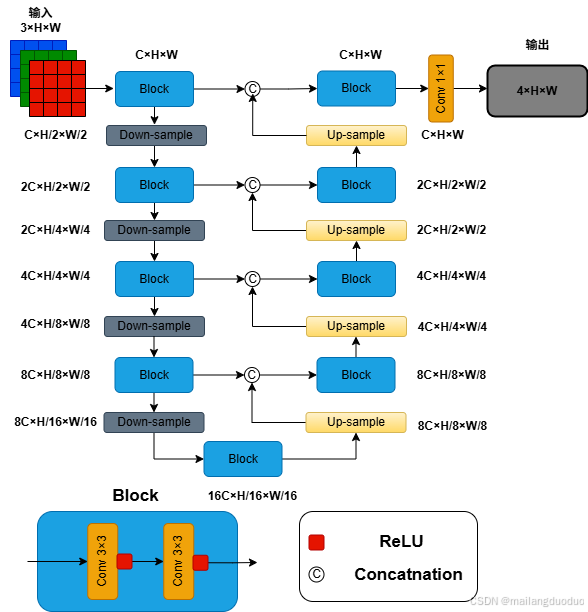
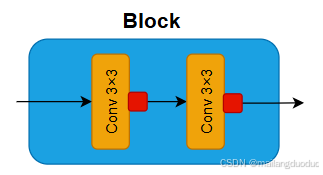
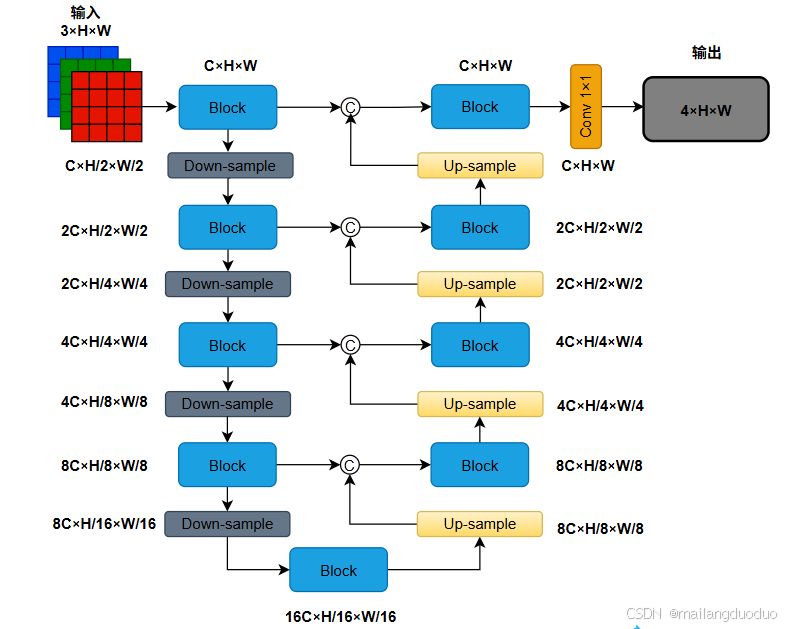
所以,需要对网络模型的输入和输出进行调整。这里为了模块化描述,将上图中的连续两次卷积激活操作封装成了一个Block,同时考虑到标签的尺寸和模型的输入尺寸相同,所以在实际操作中需要padding操作保持图像尺寸大小不变。本案例所使用的网络结构图如下所示:
这里对该结构图做以下补充描述:
- 这里并未减少UNET整体结构,即仍采用四级编码器-解码器架构。为了使模型更好的描述其他尺寸图像作为输入,这里使用了
C、H、W分别代表图片的通道数、高度、宽度信息。 - 为了方便理解,图中也对每个输出后的图像尺寸大小进行了标注,此案例中的
C在实际模型中数值为32,H、W均为512。 - 为了更好的描述编码器和解码器架构,图示并未标明该架构中
下采样和上采样操作采用的具体措施。此案例实际模型中下采样采用最大池化方式,上采样采用转置卷积(反卷积)方式。
2.2模型搭建
2.2.1前提介绍
本案例使用pytorch框架进行模型搭建,在定义网络结构时,一般采用定义类直接继承torch.nn.Module,该类中包含两个方法体:
-
__init__方法:用于初始化对象属性,属于面向对象编程范畴。 -
forward方法:定义了神经网络模块的前向传播过程,是网络结构中不可或缺的部分。
注:如果未接触过面向对象编程,建议还是了解一下面向对象的三大特性,可以阅读我早期文章——理解Java中的面向对象,可能表述的并不是太好,因为当时也刚接触。
因此网络模型结构一般如下:
class Block(nn.Module):
def __init__(self):
super(Block, self).__init__()
# 构造方法
def forward(self, x):
# 前向传播
return x
2.2.2Bolck
对于该模块,包含两个卷积层和两个 ReLU 激活函数。网络结构可定义如下两种形式:
- 方式一
class Block(nn.Module):
def __init__(self, in_channels, out_channels):
super(Block, self).__init__()
self.in_channels = in_channels
self.out_channels = out_channels
def forward(self, x):
for i in range(2):
x = nn.Conv2d(self.in_channels, self.out_channels, kernel_size=3, padding=1)(x)
x = nn.ReLU(inplace=False)(x)
self.in_channels = self.out_channels
return x
- 方式二
class Block(nn.Module):
def __init__(self, in_channels, out_channels):
super(Block, self).__init__()
self.relu = nn.ReLU(inplace=False)
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1)
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1)
def forward(self, x):
x=self.conv1(x)
x=self.relu(x)
x=self.conv2(x)
x=self.relu(x)
return x
上述两种方式等价,后续采用方式二,将卷积、激活等函数声明为一个新的属性。因为采用的是3×3卷积,所以为了保持图像尺寸不发生变化,采用padding=1进行填充。
2.2.3Net模块
Net模块是建立在Block模块基础上进行搭建的,也是整个UNET网络结构的核心。结构示意图如下:
代码实现:
class Net(nn.Module):
def __init__(self, ):
super(Net, self).__init__()
self.relu = nn.ReLU(inplace=False)
self.pool = nn.MaxPool2d(kernel_size=2, stride=2)
self.conv1 = Block(3, 32)
self.conv2 = Block(32, 64)
self.conv3 = Block(64, 128)
self.conv4 = Block(128, 256)
self.conv5 = Block(256, 512)
self.up6 = nn.ConvTranspose2d(512, 256, kernel_size=2, stride=2)
self.conv6 = Block(512, 256)
self.up7 = nn.ConvTranspose2d(256, 128, kernel_size=2, stride=2)
self.conv7 = Block(256, 128)
self.up8 = nn.ConvTranspose2d(128, 64, kernel_size=2, stride=2)
self.conv8 = Block(128, 64)
self.up9 = nn.ConvTranspose2d(64, 32, kernel_size=2, stride=2)
self.conv9 = Block(64, 32)
self.conv10 = nn.Conv2d(32, 4, kernel_size=1)
def forward(self, x):
conv1=self.conv1(x) # 32, 512, 512
# print(conv1.shape)
pool1=self.pool(conv1) # 32, 256, 256
# print(pool1.shape)
conv2=self.conv2(pool1) # 64, 256, 256
# print(conv2.shape)
pool2=self.pool(conv2) # 64, 128, 128
# print(pool2.shape)
conv3=self.conv3(pool2) # 128, 128, 128
# print(conv3.shape)
pool3=self.pool(conv3) # 128, 64, 64
# print(pool3.shape)
conv4=self.conv4(pool3) # 256, 64, 64
# print(conv4.shape)
pool4=self.pool(conv4) # 256, 32, 32
# print(pool4.shape)
conv5=self.conv5(pool4) # 512, 32, 32
# print(conv5.shape)
up6=self.up6(conv5) # 256, 64, 64
# print(up6.shape)
conv6=torch.cat([up6,conv4],dim=1) # 512, 64, 64
# print(conv6.shape)
conv6=self.conv6(conv6) # 256, 64, 64
# print(conv6.shape)
up7=self.up7(conv6) # 128, 128, 128
# print(up7.shape)
conv7=torch.cat([up7,conv3],dim=1) # 256, 128, 128
# print(conv7.shape)
conv7=self.conv7(conv7) # 128, 128, 128
# print(conv7.shape)
up8=self.up8(conv7) # 64, 256, 256
# print(up8.shape)
conv8=torch.cat([up8,conv2],dim=1) # 128, 256, 256
# print(conv8.shape)
conv8=self.conv8(conv8) # 64, 256, 256
# print(conv8.shape)
up9=self.up9(conv8) # 32, 512, 512
# print(up9.shape)
conv9=torch.cat([up9,conv1],dim=1) # 64, 512, 512
# print(conv9.shape)
conv9=self.conv9(conv9) # 32, 512, 512
# print(conv9.shape)
conv10=self.conv10(conv9) # 4, 512, 512
# print(conv10.shape)
return conv10
在进行编写前向传播forward的时候,可以加一些print()函数来查看形状,没必要像代码所示如此频繁,也可以设置断点进行查看,同时对当前网络前向传播过程中的图片形状做了标注,便于理解。
2.3模型信息查看
这里介绍两种方式:
- 创建实例对象,直接输出即可
if __name__ == "__main__":
model = Net()
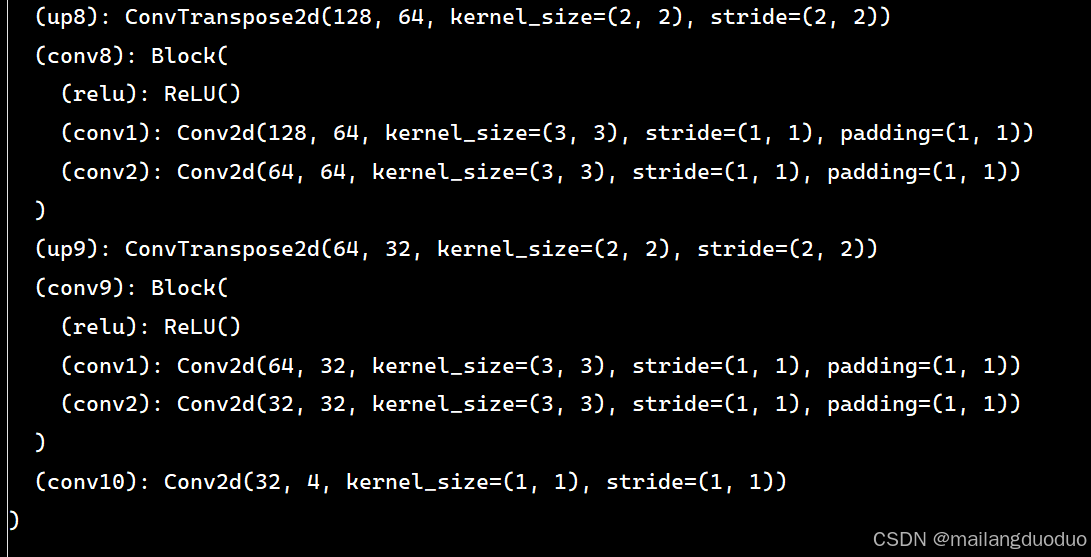
print(model)
结果如下:
- 使用
get_model_complexity_info函数
if __name__ == "__main__":
model = Net()
ops, params = get_model_complexity_info(model, (3,512,512), as_strings=True, print_per_layer_stat=True, verbose=True)
print(ops, params)
print('\nTrainable parameters : {}\n'.format(sum(p.numel() for p in model.parameters() if p.requires_grad)))
print('\nTotal parameters : {}\n'.format(sum(p.numel() for p in model.parameters())))
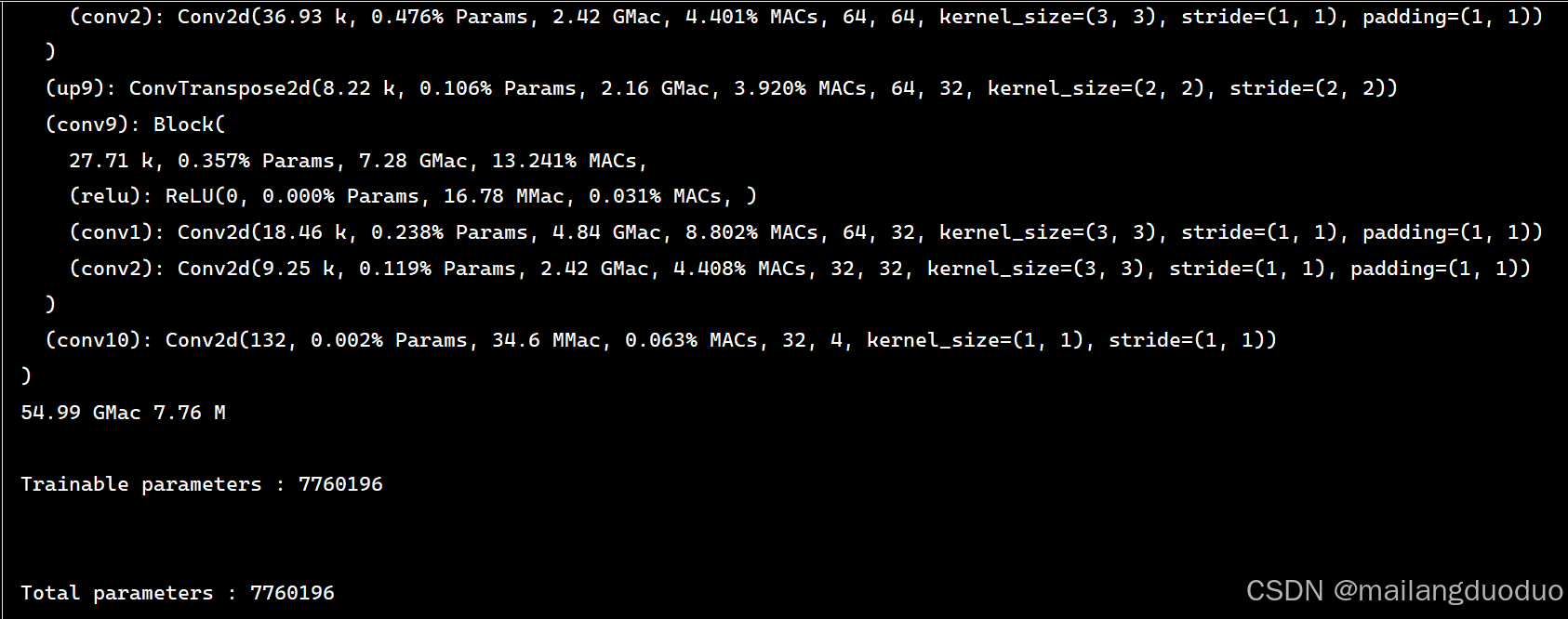
通过结果可以看出,该模型参数量还是相当大的,参数量为7.76M,即776万参数量。
3.模型训练
3.1数据集类的定义
在使用外部的数据集进行模型训练时,一般会定义一个数据集类( 此处指mydataset),该类继承自 torch.utils.data.Dataset,代码如下:
import numpy as np
from torch.utils.data import Dataset, DataLoader
import cv2
import tqdm
import os
def image_read(train_lines):
img_list = []
label_list = []
for i in tqdm.tqdm(range(len(train_lines))):
img=cv2.imread(os.path.join('./dataset/0.9/image',train_lines[i][:-1]))
label=cv2.imread(os.path.join('./dataset/0.9/label',train_lines[i][:-1]))
label = cv2.cvtColor(label, cv2.COLOR_BGR2GRAY)
img=np.transpose(img, (2, 0, 1))
img_list.append(img)
label_list.append(label)
return img_list,label_list
class mydataset(Dataset):
def __init__(self, lines,training=True):
if training:
print('Training files loading...\n')
self.img_list,self.label_list= image_read(lines)
print('Training files loaded...\n')
else:
print('Validation files loading...\n')
self.img_list,self.label_list= image_read(lines)
print('Validation files loaded...\n')
def __len__(self):
return len(self.img_list)
def __getitem__(self, idx):
img = self.img_list[idx]
label = self.label_list[idx]
# 归一化
img = img / 255.0
# label = label / 255.0
return img, label
这里对代码部分做以下说明:
image_read()函数:将路径中的图片和标签全部加载进来,并以列表的形式返回。这里读取方式使用的是cv2.imread(),该函数返回的图像数组形状是 (H, W, C),所以使用了np.transpose()函数进行调序;之所以在读取的时候使用train_lines[i][:-1],是因为每一行读取的时候,最后一个是换行符;因为标签对应的是灰度图,所以读取过后需进行灰度转换。
对于mydataset类
__init__():用于初始化对象,training=True用于区别数据集和验证集__len__():用于返回数据集大小__getitem__():用于返回指定下标图片数据,在这里使用了简单粗暴的归一化手段,因为个人觉得label数据本身就很小了,就没有进行归一化处理,当然也可以选择除3(因为标签最大值是3)进行归一化。如果觉得数据集太小,也可以在此处编写数据增强技术(随即裁剪,翻转等)
3.2数据集加载
完成数据集类的定义后,可以使用DataLoader完成数据集的加载。代码如下:
with open('./dataset/0.9/train.txt', 'r') as f:
train_lines = f.readlines()
with open('./dataset/0.9/val.txt', 'r') as f:
val_lines = f.readlines()
dataloader_train = DataLoader(mydataset(train_lines,training=True),batch_size=8,shuffle=True)
dataloader_val = DataLoader(mydataset(val_lines,training=False),batch_size=8,shuffle=False)
这里批量大小选择的是8,出于一下考虑:
- 批量大小越小,模型训练阶段的损失越容易波动
- 批量大小越大,完成一次参数更新的时间越长,增加训练时间
- 个人设备显存有限,如果使用
cpu训练,那不需要考虑该问题,因为内存会使用页面置换算法将无法容纳的部分置换到硬盘(外存设备)中
另外训练集需要打乱顺序,避免模型学习到顺序相关信息,导致模型泛化性能较差,而测试集无影响,打乱与不打乱均可。
运行结果如下:
接着查看一下,是否加载符合需求,代码如下:
for i, (img, label) in enumerate(dataloader_train):
print(img.shape)
print(label.shape)
break
运行结果:
通过结果看出,符合要求。因为批量大小为8,同时输入图片大小3×512×512,输出标签大小512×512。
3.3训练设备选择
在模型训练前,需要选择训练设备是GPU还是CPU,GPU会大大加快速度,可以通过如下指令查看是否成功安装GPU版本的pytorch
import torch
if torch.cuda.is_available():
print('GPU is available')
else:
print('GPU is not available')
接着将模型迁移至对应设备,代码如下:
import torch
from Net import Net
if torch.cuda.is_available():
device = torch.device("cuda")
else:
device = torch.device("cpu")
model = Net()
model=model.double()
print('\nTrainable parameters : {}\n'.format(sum(p.numel() for p in model.parameters() if p.requires_grad)))
print('\nTotal parameters : {}\n'.format(sum(p.numel() for p in model.parameters())))
model = model.to(device)
print('Device on cuda: {}'.format(next(model.parameters()).is_cuda))
运行结果如下:
3.4模型训练
本案例损失选择交叉熵损失函数,优化器选择Adam,初始学习率为0.0001,并使用tensorboard对训练结果进行可视化输出。代码如下:
import torch
import numpy as np
from tqdm import tqdm
from torch.utils.tensorboard import SummaryWriter
iter_num = 0
getLoss = torch.nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=0.0001)
optimizer.zero_grad()
# 创建一个 SummaryWriter 对象,用于将数据写入 TensorBoard
writer = SummaryWriter("logs")
epoch=0
while iter_num < 1000:
epoch+=1
print("---------第{}轮训练开始---------".format(epoch))
for i, (img, label) in tqdm(enumerate(dataloader_train)):
img = img.to(device)
label = label.long().to(device)
model.train()
output = model(img)
iter_num += 1
loss = getLoss(output, label)
loss.backward()
optimizer.step()
optimizer.zero_grad()
if iter_num % 10 == 0:
print('iter_num: {}, loss: {}'.format(iter_num, loss.item()))
# 记录训练损失到 TensorBoard
writer.add_scalar('Training Loss', loss.item(), iter_num)
if iter_num % 20 == 0:
torch.save({'model': model.state_dict()}, './models/weights_{}.pth'.format(iter_num))
print('model saved......')
with torch.no_grad():
model.eval()
losses = []
for _, (img, label) in tqdm(enumerate(dataloader_val)):
img = img.to(device)
label = label.long().to(device)
output = model(img)
loss = getLoss(output, label)
losses.append(loss.item())
val_loss = np.mean(losses)
print('iter_num: {}, val_loss: {}'.format(iter_num, val_loss))
# 记录验证损失到 TensorBoard
writer.add_scalar('Validation Loss', val_loss, iter_num)
writer.close()
这里模型参数信息每更新10次,记录一次损失函数,每更新20次在测试集进行验证统计损失,并保存模型参数。这里测试集验证过于频繁,可以适当调高,加快模型训练。这里由于个人显卡属于低配版-RTX 3050,所以训练时间很长。
训练完成后,对一张图片进行验证模型的分割效果,代码如下
I=cv2.imread('dataset/test.png')
I=np.transpose(I, (2, 0, 1))
I=I/255.0
I=I.reshape(1,3,512,512)
I=torch.tensor(I).to(device)
output=model(I)
output.shape
在输入模型前,需要对图片做出同样的预处理操作,因为模型输入的图片是带有批量大小的,所以使用了reshape()函数。接着将结果进行可视化输出,代码如下:
import matplotlib.pyplot as plt
output=model(I)
predicted_classes = torch.argmax(output, dim=1).squeeze(0).cpu().numpy()
# 创建彩色映射
color_map = {
0: [0, 0, 0], # 黑色
1: [255, 0, 0], # 红色
2: [0, 255, 0], # 绿色
3: [0, 0, 255] # 蓝色
}
# 根据预测类别填充颜色
height, width = predicted_classes.shape
colored_image = np.zeros((height, width, 3), dtype=np.uint8)
for i in range(height):
for j in range(width):
class_id = predicted_classes[i, j]
colored_image[i, j] = color_map[class_id]
plt.imshow(colored_image)
plt.axis('off')
plt.show()
运行结果:
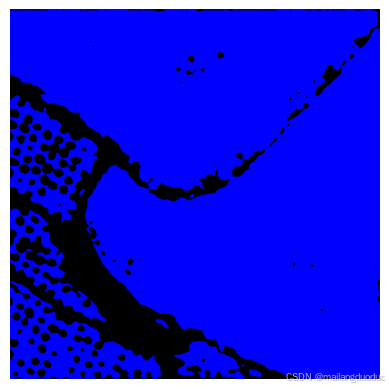
模型输入的图像为:

通过结果可以看出,该分类模型貌似只实现了二分类的语义分割,同时对其他图片也进行了验证,输出图像只有黑色和蓝色,目前个人尚不知道什么原因,求助中…
同时,个人也尝试增加了训练轮数,在上述模型的基础上,增加了400次参数更新,代码如下:
import torch
import numpy as np
from tqdm import tqdm
from torch.utils.tensorboard import SummaryWriter
# 假设 model、dataloader_train、dataloader_val 和 device 已经定义
iter_num = 1000
getLoss = torch.nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=0.0001)
optimizer.zero_grad()
# 创建一个 SummaryWriter 对象,用于将数据写入 TensorBoard
writer = SummaryWriter("logs")
while iter_num < 1400:
epoch+=1
print("---------第{}轮训练开始---------".format(epoch))
for i, (img, label) in tqdm(enumerate(dataloader_train)):
img = img.to(device)
label = label.long().to(device)
model.train()
output = model(img)
iter_num += 1
loss = getLoss(output, label)
loss.backward()
optimizer.step()
optimizer.zero_grad()
if iter_num % 10 == 0:
print('iter_num: {}, loss: {}'.format(iter_num, loss.item()))
# 记录训练损失到 TensorBoard
writer.add_scalar('Training Loss', loss.item(), iter_num)
if iter_num % 40 == 0:
torch.save({'model': model.state_dict()}, './models/weights_{}.pth'.format(iter_num))
print('model saved......')
with torch.no_grad():
model.eval()
losses = []
for _, (img, label) in tqdm(enumerate(dataloader_val)):
img = img.to(device)
label = label.long().to(device)
output = model(img)
loss = getLoss(output, label)
losses.append(loss.item())
val_loss = np.mean(losses)
print('iter_num: {}, val_loss: {}'.format(iter_num, val_loss))
# 记录验证损失到 TensorBoard
writer.add_scalar('Validation Loss', val_loss, iter_num)
# 关闭 SummaryWriter
writer.close()
此时模型对该图片的预测效果为:
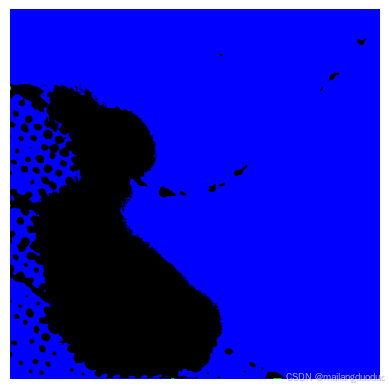
貌似结果好像更差了些,同时对其他图片也进行了验证,输出图像只有黑色和蓝色,仍然属于二分类的语义分割。
在训练过程中的损失曲线如下图所示,个人也不知道什么原因导致如此波动。
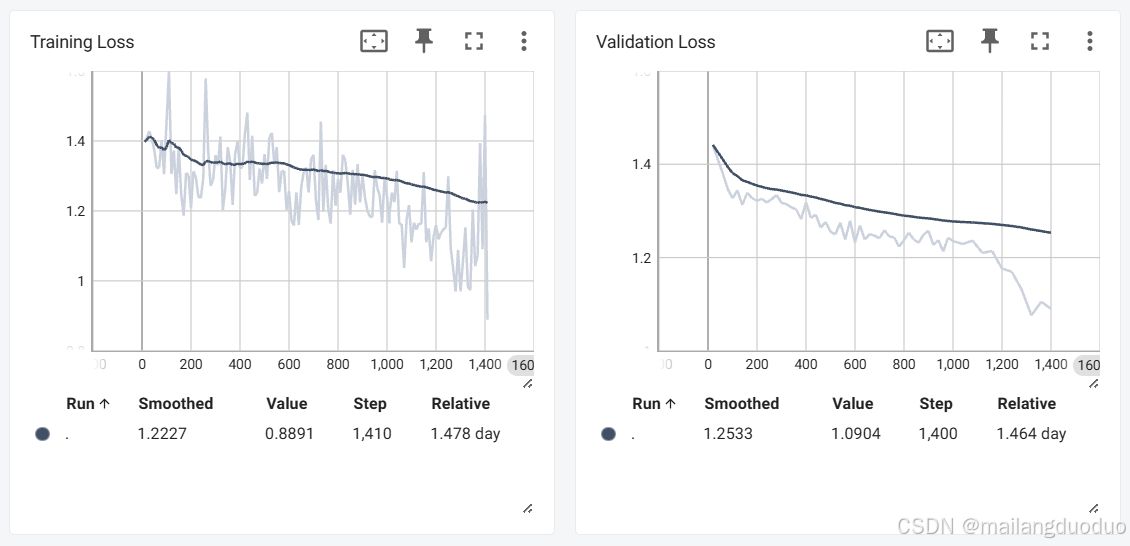
真实训练效果为灰色曲线,黑色曲线平滑和的效果。
4.小结
至此基于UNet算法的农业遥感图像语义分割案例完成,由于个人能力原因,并未接触过实际的项目开发训练过程,所以对于超参数的选择只是基于课本上所学知识,仅供参考。
针对在本案例中出现的两个问题:
- 为什么模型预测结果属于二分类语义分割的效果,更换其他的图片,同样只有黑色和蓝色?
- 训练过程中的损失为什么波动这么剧烈?
个人并不知道原因,如有知道什么原因,希望您能告知与我,万分感谢!!!



















 1261
1261

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











