







摘要
智能机器人的发展已经渗透到人们日常生活的各方各面,日益在人们日常生活中发挥着重要的作用,并且智能机器人跟踪技术是机器人研究领域的一个重要研究方向。云计算正不断应用到各种场景,传统机器人的计算存储等能力受限于其板载设备,将云计算与机器人结合用于提升机器人能力是机器人未来发展的趋势之一。
本毕业设计课题基于turtlebot实现机器人目标追踪,需要将物体识别迁移到云服务器,云服务实时的通过对图像计算做出移动指令,最终实现目标追踪。
采用机器人操作系统(ROS)与Client/Server(客户端/服务端)通信相结合来实现本课题。首先客户端用来接受kinenct所采集的图像,将物体识别到服务器;其次服务器端实时的对图像进行计算处理,利用机器人跟踪技术,并将产生的控制命令返回给客户端,最终远程实现对机器人的跟踪控制。
关键词:目标跟踪;ROS机器人程序设计;C/S通信框架;远程控制;云机器人
ROS的核心模块
1.ROS核心模块主要分为三个部分,包括通信结构基础、机器人特性功能以及工具集,(如图1.5所示):
1).通信基础设施:在最底层,ROS提供了一个提供进程间通信的消息传递接口,通常被称为中间件。ROS中间件提供以下设施:消息IDL,发布/订阅匿名消息传递,记录和播放消息,请求/响应远程过程调用,分布式参数系统
2).机器人特性功能包括标准机器人消息,机器人几何库,机器人描述语言,抢占式远程过程调用,诊断,位资估计、定位与导航;
3).工具集包括命令式工具、可视化工具以及图形化接口。
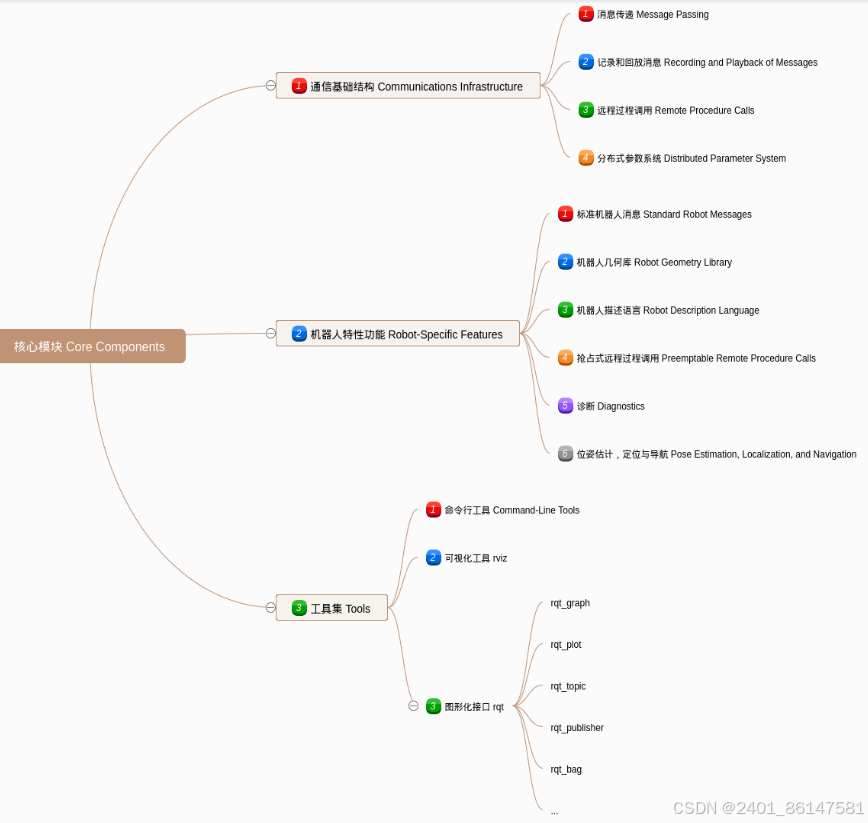
1.5 ROS核心模块图
在ROS中使用Kinect摄像头
Kinect拥三个摄像头,中间的摄像头是 RGB 彩色摄影机,用来采集彩色图像。左右两边摄像头,其中一个是红外线发射器,负责发射红外光;另外一个是红外线CMOS摄影机,负责接收红外光,共同构成了3D结构的深度感应器。
使用kinect的一大优点就是可以获得传感器的深度数据,即传感器和物体的距离,并且可识别的范围区间是60cm-10m。3D结构的深度感应器用来采集深度数据(现实中物体与摄像头的距离)。彩色摄像头RGB采集到的数据是色彩数据,RGB彩色摄像头最大支持成像分辨率是1280960,红外摄像头采集到的数据是深度数据,红外摄像头最大支持成像分辨率是640480。我们通过调用ROS的image_view包来直接显示摄像头的数据库,便能通过Kinect得到一幅彩色图像和一幅深度图像(如图4.1所示)

图4.1 Kinect采集的彩色图像和深度图像
4.2 使用rviz显示图像
rviz是我们经常使用的ROS工具,把图像显示在rviz中才更有应用价值。rviz已经为我们提供好了显示图像的接口,使用起来非常简单。首先按照上一节的方法运行kinect节点,然后打开rviz: 使用命令rosrun rviz rviz。如图4.2添加示意图。
本项目中rviz中需要添加两个marker:pointcloud和camera。
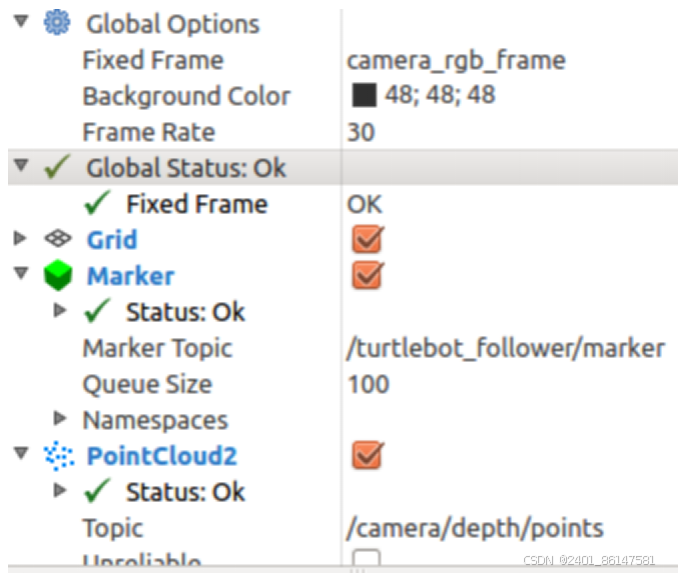
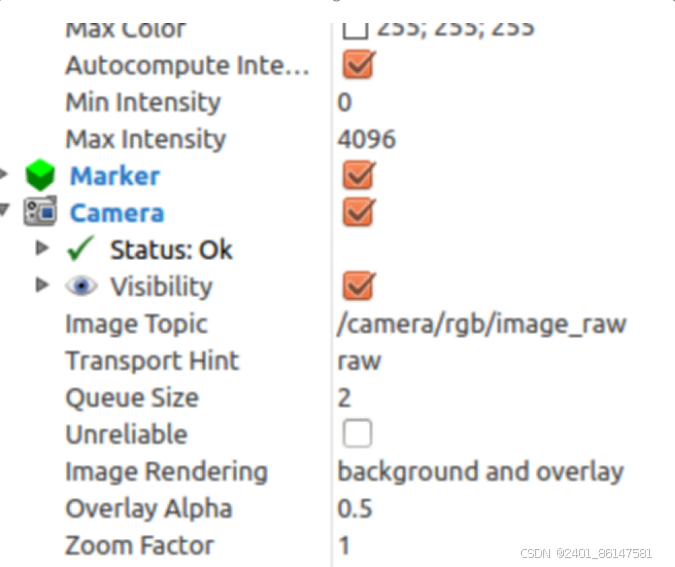
图4.2 添加示意图
项目整体架构设计
1 项目整体架构
1.1 云应用框架
本课题中,我将云应用的架构分为两部分,第一部分是面向机器人的服务其中包括两方面的内容。一方面计算或存储任务,它位于云支撑平台上,负责对机器人上的复杂任务进行处理以及对机器人上的大量数据进行远程存储。另一方面是,位于机器人上的复杂数据采集以及计算存储任务上传和接收模块。
由机器人自主发起的运行流程为:
1)机器人采集环境信息
2)机器人向云服务请求计算/存储服务
3)云应用针对服务进行计算/存储
4)云应用返回服务结果/控制机器人动作
第二部分是面向用户的服务,由外界自主发起的运行流程为:
1)外界通过云端向机器人发起控制服务
2)针对控制服务进行计算
3)云应用控制机器人动作
这两个流程使得该云应用架构形成了基于服务面向控制的架构,如图1所示。
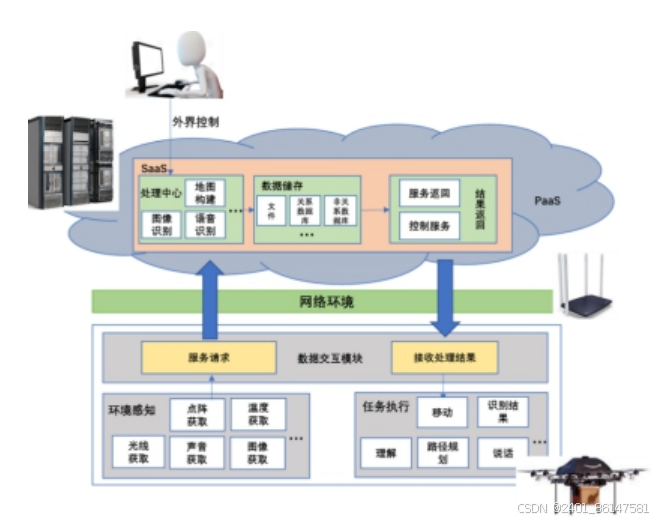
图1 云应用架构图
参考文献
[1]. R. Patrick Goebel.:ROS By Example. A PI ROBOT PRODUCTION, Version 1.1.0 for ROS Indigo: January 2015: 35-39
[2]. Gerkey, B., Vaughan, R.T., Howard, A.: The player/stage project: Tools for multi-robot and distributed sensor systems. In: Proceedings of the 11th International Conference on Advanced Robotics, pp. 317–323 (2003)
[3]. Metta, G., Fitzpatrick, P., Natale, L.: YARP: Yet Another Robot Platform. International Journal on Advanced Robotics Systems pp. 43–48 (2006)
[4]. Wyobek, K., Berger, E., der Loos, H.V., Salisbury, K.: Perspectives on standarization in mobile robot programming: The Carnegie Mellon Navigation (CARMEN) Toolkit. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2436–2441 (2003)
[5]Jackson, J.: Microsoft robotics studio: A technical introduction. Robotics & Automation Magazine, IEEE pp. 82–87 (2007)
[6]Christopher Crick., Graylin Jay., Sarah Osentosiki., Benjamin Pitzer., Odest Chadwicke Jenkins.: Rosbridge: ROS for Non-ROS Users. (2011)
[7]Jetto L, Longhi S. Development and experimental validation of an adaptive extended kalman filter for the localization of mobile robots2 j
/ / IEEE Transactions and Automation on Robotics,2009:143-150.
[8]Zhu Jihua,Zheng Nanning,Yuan Zejian,et al. A SLAM algorithm based on the central difference kalman filter [ C ] / / Intelligent Vehicles Symposium,IEEE,2009:123-128.
[9]Zhang Haitao,Rong Jian,Zhong Xiaochun. The performance comparison/ 11th IEEE International Conference onCommunication Technology,2008:432-437.
[10]Sarkka S,Viikari V,Huusko M,et al. Phase-based UHF RFID tracking with nonlinear kalman filtering and smoothing [ J ]. IEEE Sensors Journal,2012,12(5):904-910.
[11]Nassar S. Improving the inertial navigation system(INS) error model for INS and INS / DGPS applications [ D ] . Alberta: University of Calgary,2003.
[12]Lei Xuan,Yang Jing. Application of RTS optimal smoothing algorithm in satellite attitude determination[C] / / 2011 2nd International Conference on Intelligent Control and Information Proceedings,2011:978-982.

















 2931
2931

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









