







摘 要
基于stm32的四旋翼无人机飞行控制器设计的目的是通过对四旋翼无人机系统软件的优化设计,不断提高无人机的研发技术,使无人机更加智能化、人性化,从而降低无人机的操作难度,使无人机的适用范围不断扩大,为各行各业提供便利。本文从实际应用角度出发,研究和设计了四旋翼无人机的飞行控制器,通过采用高性能 stm32 单片机作为无人机主控芯片完成了无人机的机体控制总体结构、电源和控制电路以及各种通信电路等相关技术的设计,重点探讨了无人机的外形及飞行装置。在四旋翼型无人机自动控制系统中,电机可以作为其主要的动力源,通过给出不同的信号传感器来自动控制各个旋翼的运转速度,并根据各个旋翼的反馈信号来自动调整各个旋翼的运转角度。本文主要通过对四旋翼无人机余度飞控系统、无人机系统软件程序编辑以及飞控系统硬件设计等方面进行了研究与实现。
四旋翼无人机飞行控制系统设计
2.1 控制系统总体设计
基于stm32单片机的四旋翼无人机控制系统设计,使用了 STM32F103RB 型单片机作为图像处理模块、24 路舵机控制板作为飞行控制器。具体的运行流程是使用单片机完成各种图像处理与运行动作的决策,并将动作指令传送到运动控制器中,运动控制器再传回动作执行状态以及传感器信号。通过传送回来的画面对无人机进行控制,实现无人机动作的调试和无人机视觉系统的调试。整个运行流程是一个闭环控制系统,所以其工作总体设计架构图如图 2-1 所示。
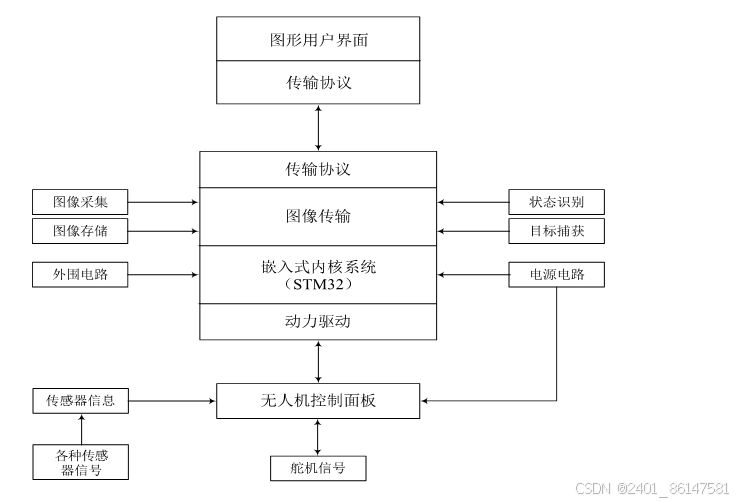
图2-1 系统总体设计框图
四旋翼无人机飞控系统硬件设计
3.1 飞控系统硬件结构
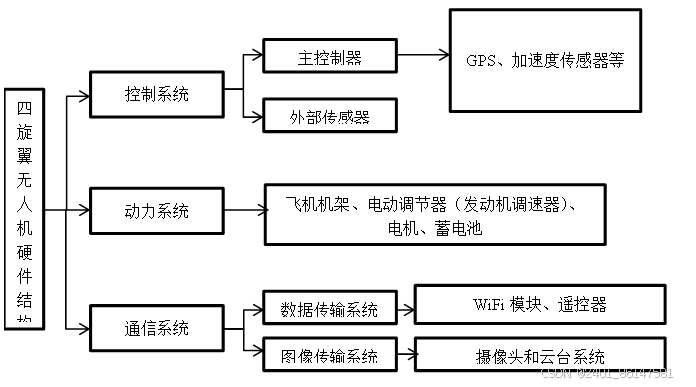
图3-1四旋翼无人机硬件结构
结论
本研究课题根据四旋翼无人机飞行器的整体结构特点,对四旋翼无人机飞行器的飞行控制系统进行了设计与研究,提出了基于STM32的四旋翼无人机飞行控制系统的设计方案与要求,并研发了一种四旋翼无人机冗余飞控系统。它具有灵活性、可移植性和高容错性等优点。它满足了四旋翼无人机设计的要求,各部件之间有着密切的联系,为最终设计奠定了坚实的基础。本文主要分为以下几个部分:总体系统方案与需求设计、飞控系统硬件结构设计、冗余系统以及子系统设计、软件系统的设计与编程。
(1)对无人机飞行控制器系统的总体设计,介绍了系统的总体设计方法,也对无人机视觉系统和通讯系统进行了设计,视觉系统的设计是对图像的采集和处理,并对目标进行跟踪,然后是对目标的状态和距离进行判断,通过通讯系统完成信息的传递,最终反馈到操作者平台。
(2)对无人机的硬件系统进行了设计,选择 STM32 单片机进行无人机飞行器的控制,也对其外部的硬件电路进行设计。然后再通过无人机的舵机控制软件,分别设计无人机飞行过程中的基本控制。
(3) 编写无人机软件程序,使其可以正常运行。
在主电路上,采用了稳压模块,为电路提供所需的稳定的直流电源。传感器上, 采用了GPS传感器等,用来保证机器人正常工作,使无人机可以按照事先设定的航行轨迹完成飞行;图像采集上,采用了抗噪能力较强、低功耗的 OV7670 摄像头;在电源上,采用的是7.4v航空型号锂电池;舵机采用的是JR的es539型高转矩执行器。
控制电路上, 采用了高性能、低功耗的 STM32 单片机, 型号选择为STM32F103RB,其功能和引脚满足了本设计的需求。经过对 STM32 的编程,来实现预期的目标,做到智能化,人性化以及节能化。

















 1202
1202

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









