






publisher_->publish(msg);
}
private:
rclcpp::Publisher<geometry_msgs::msg::Twist>::SharedPtr publisher_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
auto node = std::make\_shared<PublisherNode>();
rclcpp::Rate loop\_rate(10);
while(rclcpp::ok()) {
auto msg = geometry_msgs::msg::Twist();
msg.linear.x = 0.5;
msg.angular.z = 0.2;
node->publish(msg);
RCLCPP\_INFO(node->get\_logger(), "Publishing: x: %.2f, z: %.2f", msg.linear.x, msg.angular.z);
loop_rate.sleep();
}
rclcpp::shutdown();
return 0;
}
* **订阅者**(订阅的话题存在消息即触发回调函数)
class SubscriberNode : public rclcpp::Node
{
public:
SubscriberNode() : Node(“lab_topic_sub”)
{
subscriber_ = create_subscription<geometry_msgs::msg::Twist>(
“/turtle1/cmd_vel”, 10, std::bind(&SubscriberNode::OnPoseCallback, this, _1));
}
private:
void OnPoseCallback(const geometry_msgs::msg::Twist & msg) const
{
RCLCPP\_INFO(get\_logger(), "Publishing: x: %.2f, z: %.2f", msg.linear.x, msg.angular.z);
}
rclcpp::Subscription<geometry_msgs::msg::Twist>::SharedPtr subscriber_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared());
rclcpp::shutdown();
return 0;
}
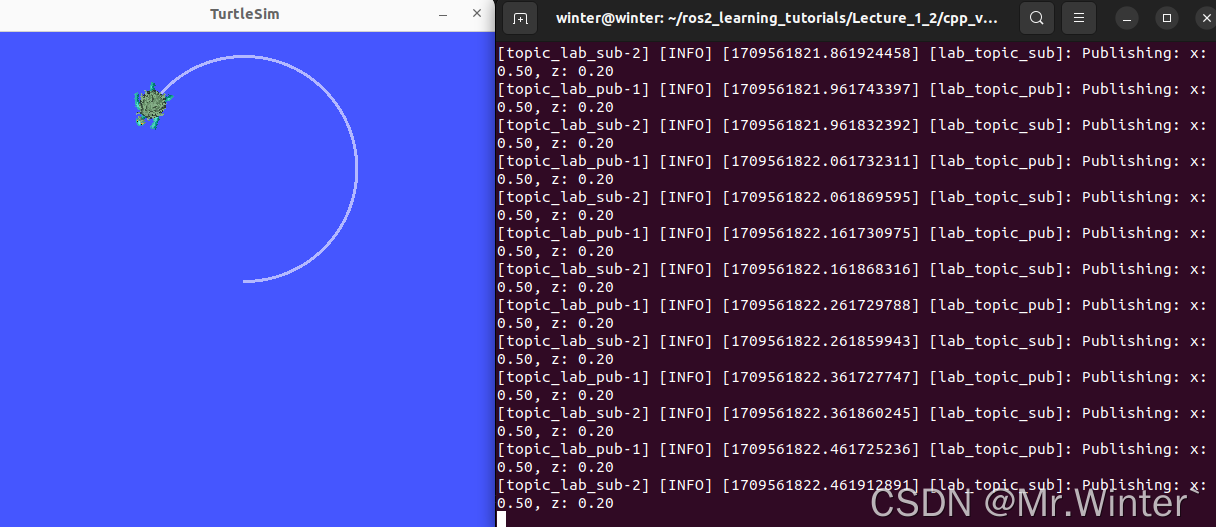
话题通信的效果如下所示:
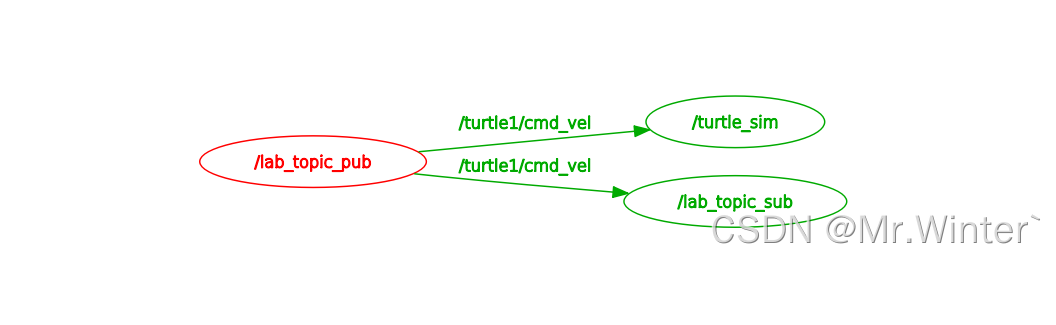
计算图可视化为:
## 3 话题模型实现(Python)
>
> 实验目标:发布者发布控制消息到`/turtle1/cmd_vel`,控制乌龟其做圆周运动;订阅者订阅`/turtle1/cmd_vel`,在终端显示乌龟实时的位置坐标。
>
>
>
* **发布者**
class PublisherNode(Node):
def __init__(self, name):
super().init(name)
self.publisher_ = self.create_publisher(Twist, ‘/turtle1/cmd_vel’, 10)
def publish(self, msg: Twist):
self.publisher_.publish(msg)
* **订阅者**
class SubscriberNode(Node):
def __init__(self, name):
super().init(name)
self.subscirber_ = self.create_subscription(
Twist, ‘/turtle1/cmd_vel’, self.OnPoseCallback, 10
)
def OnPoseCallback(self, msg):
self.get_logger().info(f"Publishing: x: {msg.linear.x:.2f}, z: {msg.angular.z:.2f}")
def main(args=None):
rclpy.init(args=args)
node = SubscriberNode(“lab_topic_sub”)
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
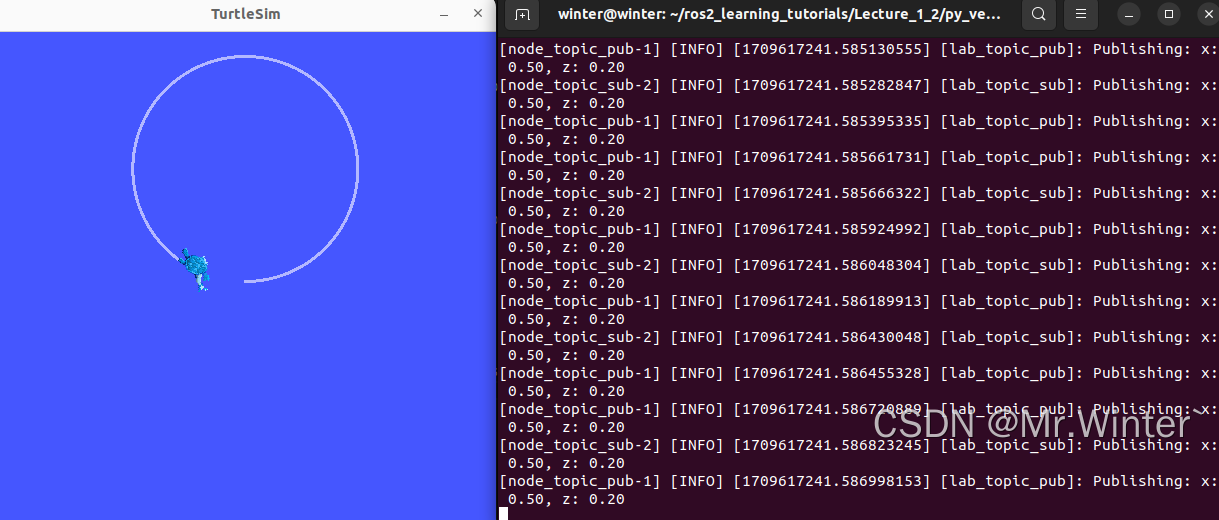
话题通信的效果如下所示:
## 4 自定义消息
ROS2系统通过`std_msgs`封装了一些常用的原生数据类型,比如`String`、`Int32`、`Int64`等,对于一些复杂数据应用场景,往往需要在`std_msgs`或其他消息库的基础上继续封装更高级的数据类型
自定义消息的通用流程如下:
>
> * 功能包下新建`msg`文件夹,在其中添加自定义消息`xxx.msg`
> * 功能包`package.xml`中添加编译依赖与执行依赖
> ```
> <buildtool\_depend>rosidl_default_generators</buildtool\_depend>
> <exec\_depend>rosidl_default_runtime</exec\_depend>
> <member\_of\_group>rosidl_interface_packages</member\_of\_group>
>
> ```
> * 功能包`CMakeLists.txt`中添加编译消息相关依赖
> ```
> find_package(rosidl_default_generators REQUIRED)
> rosidl_generate_interfaces(${PROJECT_NAME}
> "xxx.msg"
> DEPENDENCIES xxx_msgs
> )
>
> ament_export_dependencies(rosidl_default_runtime)
>
> ```
> * 编译自定义消息,在`install/<pkg_name>/include`中生成由`xxx.msg`编译的C++可识别的`xxx.hpp`头文件
> * 引入`xxx.hpp`即可调用自定义消息
>
>
>
下面给出一个实例:
添加如下自定义消息,并按上面步骤配置依赖
Person.msg
string name
string gender
uint8 age
geometry_msgs/Point position
float64 x
float64 y
float64 z
定义一个发布者、一个订阅者测试自定义消息
* **发布者**
// 初始化名为personPub的ROS节点, 该节点应在CMakeLists.txt中被构建为可执行文件
ros::init(argc, argv, “personPub”);
// 创建节点句柄
ros::NodeHandle pubNode;
// 创建发布者, 该发布者属于pubNode节点, 发布话题为"/person/info",
// 消息类型为"msgtest::Person", 发布队列长度为10
ros::Publisher pub = pubNode.advertise<msg_lab::Person>(“/person/info”, 10);
// 设置发布频率
ros::Rate loopRate(10);
while(ros::ok())
{
// 设置消息
msg_lab::Person msg;
msg.name = “winter”;
msg.gender = “man”;
msg.age = 20;
msg.position.x = 10;
msg.position.y = 20;
msg.position.z = 30;
// 发布消息
pub.publish(msg);
ROS_INFO(“Publish Person Info[name: %s gender: %s age: %d pos: x-%.2f y-%.2f z-%.2f]”,
msg.name.c_str(), msg.gender.c_str(), msg.age, msg.position.x, msg.position.y, msg.position.z);
// 按循环频率延时
loopRate.sleep();
}
* **订阅者**
void personInfoCallBack(const msg_lab::Person::ConstPtr &msg)
{
ROS_INFO(“Subscribe Person Info[name: %s gender: %s age: %d pos: x-%.2f y-%.2f z-%.2f]”,
msg->name.c_str(), msg->gender.c_str(), msg->age, msg->position.x, msg->position.y, msg->position.z);
}
int main(int argc, char** argv)
{
// 初始化名为personSub的ROS节点, 该节点应在CMakeLists.txt中被构建为可执行文件
ros::init(argc, argv, “personSub”);
// 创建节点句柄
ros::NodeHandle subNode;
// 创建订阅者, 该订阅者属于subNode节点, 订阅话题为"/person/info",
// 订阅队列长度为10, 收到订阅消息后出发回调函数personInfoCallBack
ros::Subscriber sub = subNode.subscribe(“/person/info”, 10, personInfoCallBack);
// 循环等待回调函数
ros::spin();
return 0;
}
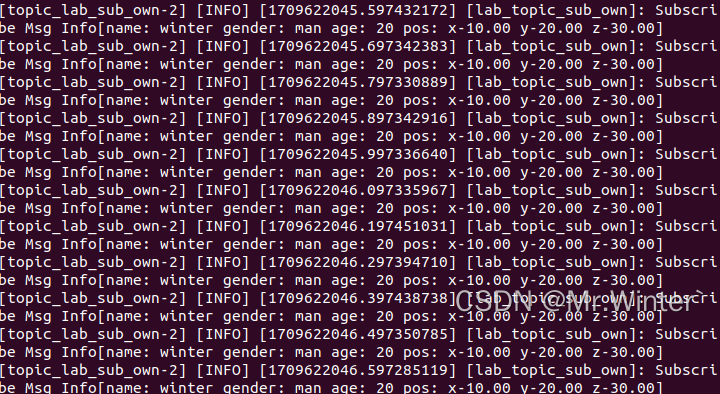
实测效果如下:















 7975
7975

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









