






0 简介
参考文献:
该文章描述了对多传感器数据融合的深入研究,在过去十年中,多传感器数据融合已用于定位/导航系统。在本文中,从三个方面对不同的导航/定位系统进行分类和阐述:(1)来源;(2)算法和架构;(3)场景。并将其进一步将其分为两类:基于分析的融合和基于学习的融合。对于基于分析的融合,我们讨论了卡尔曼滤波器及其变体、图优化方法和集成方案。对于基于学习的融合,在多传感器集成定位/导航系统中说明了几种有监督、无监督、强化学习和深度学习技术 。
1 导航定位源
导航定位源可进行以下分类:
1.1单一定位导航系统
| 技术名称 | 技术简介 |
|---|---|
| 惯性导航 (Inertial Navigation) | 使用惯性传感器进行相对定位的技术,仅能在有限时间内提供准确解决方案,因为惯性传感器错误和积分错误会导致解决方案随时间偏离。需要其他绝对定位源(如GNSS)进行辅助。 |
| 全球导航卫星系统 (GNSS) | 20世纪60年代开发的技术,提供实时、全天候、全球性导航服务。使用卫星与接收器间的距离测量估计位置,精度从几米到厘米不等。在城市峡谷或室内环境中因信号阻断、多路径和电磁干扰而精度降低。 |
| 可见光定位 (VLP) | 利用LED灯作为发射器,光电二极管或相机作为接收器的定位技术。光信号可通过RSS、TOA、TDOA和AOA等模式解释。大多数VLP系统精度达到几厘米,不受电磁波干扰,但光信号无法穿过不透明物体。 |
| WiFi | 使用WiFi路由器/AP作为发射器和WiFi接收器的定位技术。利用飞行时间、到达角度、信道状态信息和RSS进行测量。精度在1-10米,优点包括支持智能设备、无需额外基础设施、覆盖广、成本低,但易受多路径和信号波动影响。 |
| 蓝牙 (Bluetooth) | 常用于IoT应用的短距离无线技术。与WiFi相比功耗更低,适用于室内定位,特别是蓝牙低功耗(BLE)技术。可基于RSS进行定位,常与其他定位技术结合使用,如惯性传感器。 |
| 射频识别 (RFID) | 使用RF的RSS和AOA指示发射器与接收器间距离的技术。根据标签分布和定位算法,精度从厘米级到房间级不等。特点包括非接触通信、高数据率、高安全性、非视线可读性、紧凑性和低成本。 |
| 超宽带 (UWB) | 在极短时间间隔内(>1ns)以脉冲形式通信,不使用载波的技术。定位算法包括TOA、TDOA、AOA和RSS。高带宽和短脉冲使其在非视线环境中有效,减少多路径效应,实现厘米级定位精度,但需额外基础设施。 |
| 超声波 (Ultrasonic) | 受蝙蝠导航启发的技术,使用声波进行定位。系统配置包括标签作为接收器或发射器,与墙面/天花板安装的多个发射器/接收器协同工作。优点是成本低、可靠性高、房间间零泄漏,但性能受湿度和温度影响。 |
| 磁场 (Magnetics) | 基于低频准静态磁场的定位技术,提供几米精度的解决方案。室内人工干扰产生的磁异常可用作指纹或地标。可补充无线定位技术,特别是在复杂环境中,但并非普遍适用,可能导致显著定位误差。 |
| 里程计 (Odometer) | 测量车辆或机器人移动距离的传感器技术。常与惯性传感器集成用于车辆导航,提供速度和位移信息,但会累积误差,需结合其他绝对定位源如GPS使用。 |
| 视觉 (Vision) | 使用相机捕捉物体运动的定位技术,以相对低成本提供准确定位。可用于物体跟踪、导航和SLAM(同步定位与建图)。局限性包括隐私问题、特征提取难度和大量计算负载。 |
| 激光雷达 (LiDAR) | 使用激光脉冲测量距离并创建环境3D表示的技术。广泛应用于自动驾驶、无人机和机器人导航。能提供高精度的环境感知和定位,但设备成本较高,在恶劣天气条件下性能可能下降。 |
| 5G网络 | 使用蜂窝网络的定位技术,有潜力达到厘米级精度。利用更高信号带宽、更密集网络和MIMO技术显著提高基于信号传播延迟的定位精度。频率包括6GHz以下和毫米波段,两者均可用于定位,通常与GNSS集成使用。 |
1.2 绝对定位源
| 类别 | 技术 | 描述 |
|---|---|---|
| 无线电基础 | GNSS | 全球导航卫星系统,包括GPS、北斗、GLONASS和伽利略,提供全球覆盖的定位服务 |
| WiFi | 使用WiFi路由器/AP作为发射器,利用信号强度、飞行时间等测量方法进行定位 | |
| 蓝牙(Bluetooth) | 短距离无线技术,特别是蓝牙低功耗(BLE)技术,功耗低,适用于室内定位 | |
| RFID | 使用射频识别技术,根据标签分布和定位算法,精度从厘米级到房间级不等 | |
| UWB | 超宽带技术,以脉冲形式通信,高带宽和短脉冲使其在非视线环境中有效,可达厘米级精度 | |
| 5G | 使用蜂窝网络进行定位,利用更高信号带宽、更密集网络和MIMO技术提高精度,潜力达到厘米级 | |
| 光基础 | VLP | 可见光定位,使用LED灯作为发射器,光电二极管或相机作为接收器,精度较高但受信号阻断影响 |
| 音频基础 | 超声波 | 使用超声波信号进行定位,可实现厘米级精度,成本低、可靠性高,但受湿度和温度影响 |
| 声学 | 在可听频谱中使用声波定位,信号传播速度低,便于测量飞行时间,但在动态场景下鲁棒性较差 | |
| 场基础 | 磁场 | 基于室内人工干扰产生的磁异常进行定位,可作为指纹或地标,不受无线信号干扰影响 |
| 重力场 | 重力匹配可用于水下无源导航系统,帮助克服INS误差累积,也可用于地形轮廓匹配 | |
| 地图 | 地图匹配为其他传感器提供可靠的位置约束,可用于室内定位和城市环境,但需耗费大量人力和时间建立 | |
| 视觉基础 | 视觉 | 使用相机捕捉物体运动,能够进行绝对和相对定位,在低成本条件下提供准确定位 |
| SAR | 合成孔径雷达,使用主动微波成像雷达技术,是一种广义的视觉定位技术 |
1.3 相对定位源
| 技术 | 描述 |
|---|---|
| 惯性导航系统(INS) | 使用惯性传感器(加速度计和陀螺仪)进行相对定位的系统,提供姿态和位置信息,但随时间积累误差 |
| 行人航位推算(PDR) | 专用于行人的系统,使用惯性传感器结合行走特定知识,通过累积{距离,航向}向量估计2D位置,常用于智能手机应用 |
| 里程计(Odometer) | 测量车辆或机器人移动距离的传感器技术,常与惯性传感器集成用于陆地车辆导航 |
| 速度计(Speed Log) | 船舶和水下自主航行器使用的速度测量设备,基于多普勒效应测量速度,可替代里程计 |
| 多普勒速度计(DVL) | 水下导航中常用的速度测量设备,为惯性导航系统提供辅助信息 |
| 视觉里程计(VO) | 使用相机收集图像数据进行位姿估计,通过关联不同图像中的同源点来实现,适用于各种环境 |
| 视觉-惯性里程计(VIO) | 结合相机和惯性传感器的系统,在各种场景(室内、室外车辆、水面船舶和外太空)中应用广泛 |
| 激光雷达(LiDAR) | 使用激光脉冲测量距离并创建环境3D表示的技术,陆地车辆(特别是自动驾驶)中广泛应用 |
2 基于分析的多传感器数据融合
2.1 基于算法分类
状态估计是从间接、不准确和不确定的测量中提取隐含量值的过程,其主要目标是最小化状态估计误差,同时抵消不确定性和扰动因素。为了区别于基于学习的方法,这类估计方法被定义为基于分析的方法。在集成导航系统中,最广泛使用的方法是卡尔曼滤波(KF),该方法由Rudolf Kalman于1960年提出,适用于高斯噪声下的线性系统。然而,大多数实际应用场景都具有非线性和/或非高斯特性,这限制了经典KF的应用。因此,一些变体如扩展卡尔曼滤波(EKF)和无迹卡尔曼滤波(UKF)被广泛应用,这些方法可分为基于线性化的滤波器、基于Sigma点的滤波器和基于蒙特卡洛的滤波器。在过去十年中,随着计算能力的提升,粒子滤波(PF)已成为解决非线性分析问题和非高斯噪声分布的有效工具。近年来,图优化方法因其全局设计特性和对历史信息的充分利用而在研究者中变得流行。下图为主要算法分类:
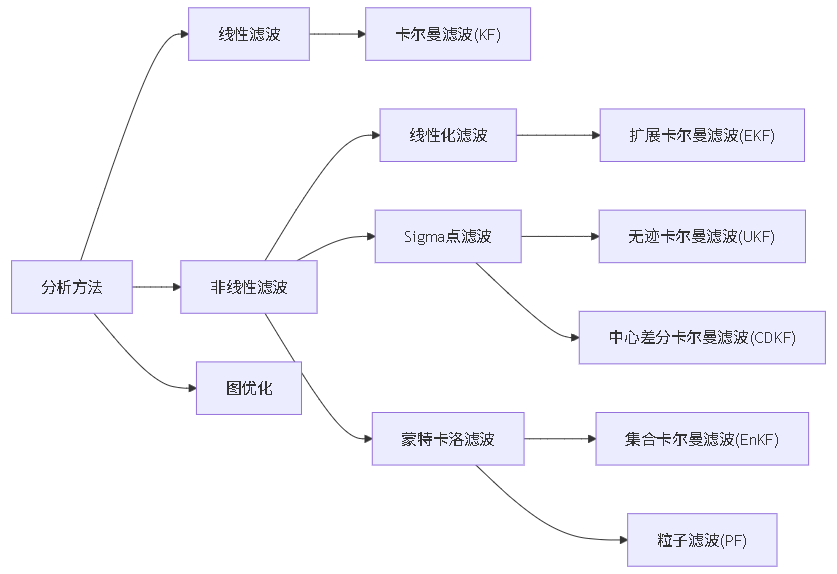
| 名称 | 估计器的简介 | 相对于其他方法的特点 |
|---|---|---|
| 卡尔曼滤波器(KF) | 递归分析方法,使用上一状态的估计和当前观测来找到当前状态的最优估计。假设变量和噪声呈高斯分布,且系统是线性的。 | 计算复杂度低,但只能处理线性系统,对非线性函数处理能力差,无法处理非高斯噪声 |
| 扩展卡尔曼滤波器(EKF) | 通过将非线性函数展开为泰勒级数并忽略高阶项,将非线性系统近似为线性系统。 | 计算复杂度低,能处理非线性函数但效果一般。在高阶项被忽略时可能导致滤波器发散,需要计算雅可比矩阵 |
| 无迹卡尔曼滤波器(UKF) | 属于sigma点卡尔曼滤波器类,采样状态的特殊sigma点集。通过无迹变换将sigma点通过非线性函数传播,然后加权重采样为高斯分布。 | 处理非线性函数的能力强,不需要计算雅可比矩阵,但计算复杂度中等,比EKF高 |
| 集合卡尔曼滤波器(EnKF) | 基于蒙特卡洛方法的随机采样算法,能更好地反映极高阶和非线性系统的状态。随机采样一定数量的点来实现状态协方差矩阵的数值计算。 | 处理非线性函数的能力强,不需要计算雅可比矩阵,降低了计算状态协方差矩阵的复杂性,计算复杂度中等 |
| 粒子滤波器(PF) | 使用蒙特卡洛方法的递归滤波器。用一组加权随机样本(粒子)表示随机事件的后验概率。 | 能处理任何状态模型,对非线性函数处理能力强,可以处理非高斯噪声,但计算复杂度高 |
| 图优化(Graph Optimization) | 一种非线性优化方法,使用状态变量作为顶点和观测因子作为边,构建图模型来描述导航系统内部关系。通过最小化代价函数获得最优状态估计。 | 与滤波方法相比,图优化充分利用历史信息,能够获得更好的定位精度;可以使用滑动窗口等策略实现实时估计;适合传感器融合,关键在于为多传感器数据设计有效的代价函数;计算复杂度较高,但有现成的优化库如Ceres solver、g2o和GTSAM可用 |
2.2 基于集成方法的分类
总结如下:
| 名称 | 集成架构的简介 | 相对于其他架构的优缺点 |
|---|---|---|
| 松耦合集成(Loosely-Coupled Integration, LCI) | 最早实现的集成方案,在位置、速度和时间(PVT)层面进行集成,也称为分散式或级联滤波。每次使用一个系统的导航输出而非原始观测值来更新系统状态。 | 优点:简单灵活的方法;滤波器规模小于集中式方法;易于实现和维护。 缺点:所有单独定位系统需要独立给出解决方案;精度低于其他方案;当可见卫星少于4颗时无法提供解决方案。 |
| 紧耦合集成(Tightly-Coupled Integration, TCI) | 也称为集中式方法,在观测量层面进行集成。与LCI不同,TCI使用原始观测值(包括TOA、RSS、AOA等)来更新系统状态,因此估计器数量更少。 | 优点:只需要一个系统给出独立解决方案;可以检测和拒绝质量差的观测值;当可见卫星少于4颗时仍能提供解决方案。 缺点:只实现一个滤波器,比LCI更复杂;系统误差(如GNSS中的周跳)应在滤波前消除;需要访问原始传感器数据。 |
| 深耦合集成(Ultra-Tightly-Coupled Integration, UTCI) | 也称为深度集成,将GNSS信号跟踪和GNSS/INS集成合并为单个KF。UTCI在物理层而非数据层集成,因此设计更加紧密。 | 优点:在信号跟踪和抗干扰方面具有最佳性能;能更好地处理弱信号环境;信号恢复能力强。 缺点:不灵活,需要在传感器制造时设计;架构一旦制造完成很难修改;实现最复杂,需要底层信号访问;系统成本高。 |
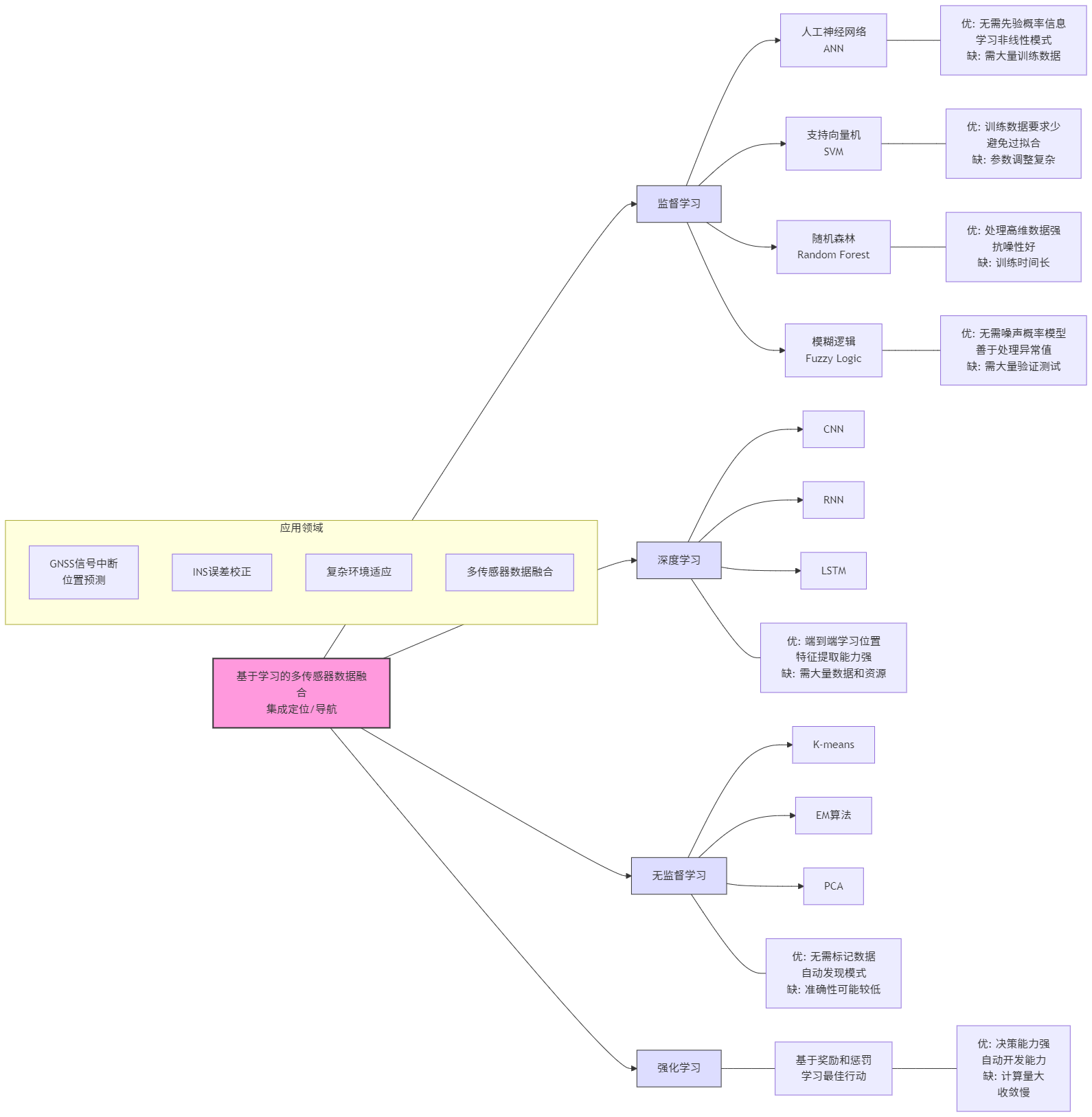
3 基于学习的多传感器数据融合
| 名称 | 方法简介 | 相对于其他方法的特点 |
|---|---|---|
| 人工神经网络 (ANN) | 能够模型化和预测非线性系统,无需先验概率信息。在GNSS/INS系统中常用于GNSS信号中断期间预测位置或INS误差。 | 优点:不需要有关过程和测量噪声的先验统计信息;泛化能力强;能够学习复杂的非线性模式。 缺点:依赖大量训练数据;需要优化网络结构;训练过程复杂。 |
| 模糊逻辑 (Fuzzy Logic) | 通过实现自适应滤波器解决标准卡尔曼滤波器中噪声建模问题。由模糊化、模糊推理和去模糊化三个模块组成,可调整测量和过程噪声协方差。 | 优点:能在没有噪声概率特性的情况下建模;系统简单可理解;能够利用专家知识;善于处理非线性和非高斯异常值。 缺点:其推理依赖于假设,结果可能不被广泛接受;需要大量设备测试验证。 |
| 支持向量机 (SVM) | 基于结构风险最小化而非经验误差最小化原则。在特定情况下性能优于神经网络,避免局部最小值和过拟合问题。 | 优点:训练数据要求少于神经网络;避免局部最小值和过拟合;计算效率高。 缺点:核函数和惩罚函数参数调整复杂;不直观。 |
| 随机森林 (Random Forest) | 集成学习方法,由多个决策树组成。随机选择训练样本和特征来构建决策树森林,通过多数表决确定最终输出。 | 优点:处理高维数据能力强;不易过拟合;预测精度高;对数据噪声不敏感。 缺点:训练和执行时间可能较长;解释性较差;存储需求大。 |
| 无监督学习 (K-means, EM, PCA) | 不需要手动标记数据的学习方法。K-means用于聚类;EM算法估计潜变量和未知噪声特性;PCA用于降维和特征提取。 | 优点:不需要标记数据;能自动发现数据模式;EM算法可以估计未知噪声特性。 缺点:准确性可能低于监督学习方法;应用于集成导航系统的案例较少;模型选择困难。 |
| 深度学习 (Deep Learning) | 基于深层神经网络的学习方法,能从多传感器数据中直接学习特征和位置信息。包括CNN、RNN、LSTM等架构,可实现端到端定位。 | 优点:特征提取能力强;端到端学习位置;融合能力强;可处理高维复杂数据。 缺点:需要大量数据和计算资源;可解释性差;实时性可能受限;训练复杂度高。 |
| 强化学习 (Reinforcement Learning) | 通过与环境交互学习采取最佳行动的方法。基于奖励和惩罚机制优化系统表现,适合复杂决策任务。 | 优点:具有决策能力,适合车辆跟踪;自动开发能力强;学到的参数可保持一定时间有效。 缺点:导航应用中需要额外存储;深度强化学习计算量大,奖励定义复杂;收敛速度可能慢。 |

















 1442
1442

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









