







ROS-LLM简介
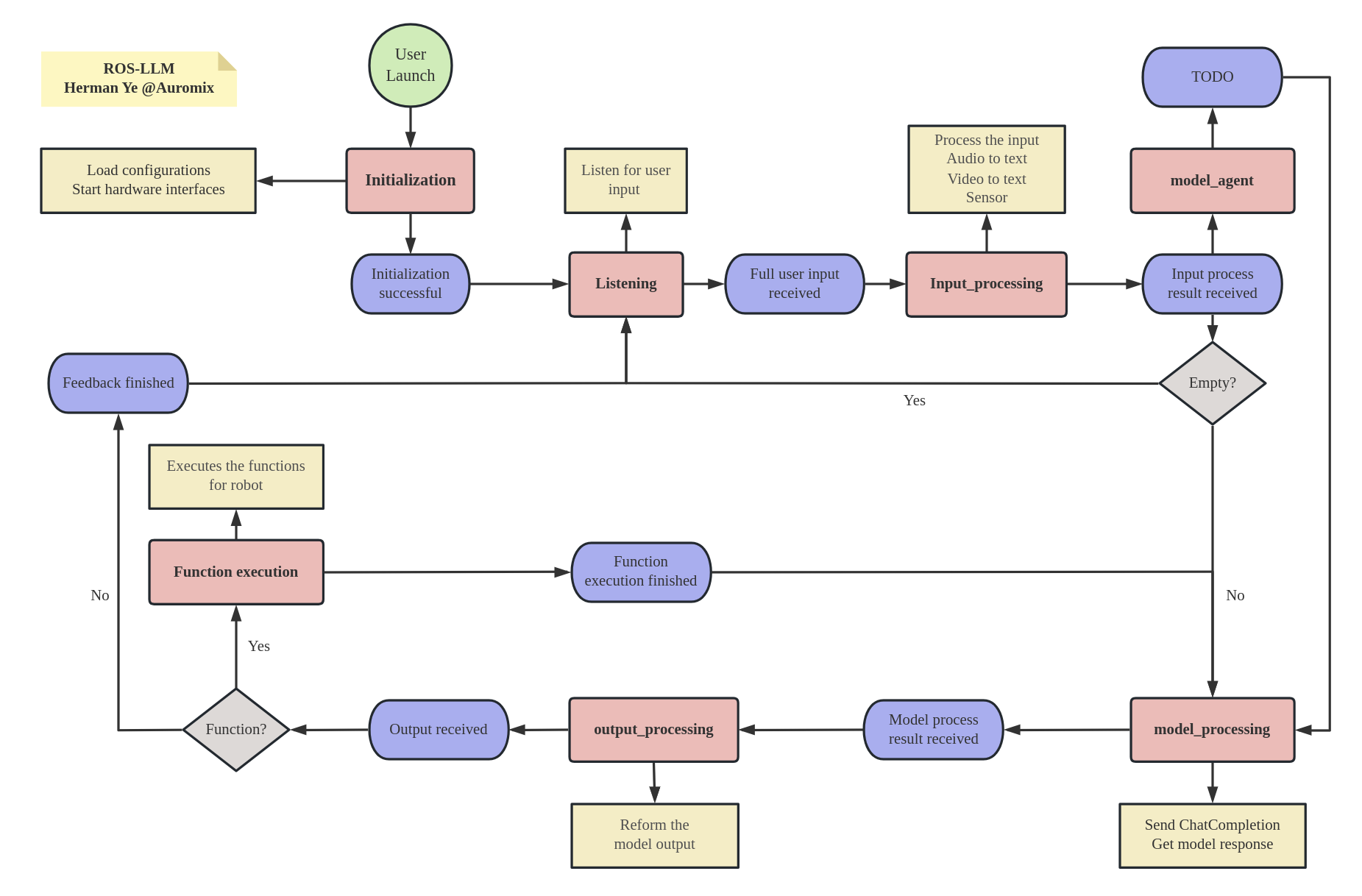
ROS-LLM是一个专为ROS(机器人操作系统)设计的嵌入式智能框架。它允许通过自然语言与机器人进行交互,并利用大型语言模型(如GPT-4和ChatGPT)来进行机器人的决策和控制。这个框架设计简单易用,只需提供机器人的功能接口,就可以在10分钟内完成集成和使用。
主要特点
ROS-LLM具有以下几个主要特点:
-
🤖 ROS集成:无缝对接ROS系统,实现全面的机器人控制。
-
🧠 大语言模型支持:利用GPT-4、ChatGPT等模型增强决策和任务管理能力。
-
🗣️ 自然交互:通过对话方式实现与机器人的直观沟通。
-
🔄 灵活控制:基于语言模型解释实现运动和导航等任务控制。
-
🔌 简化扩展:提供简单接口,便于整合机器人功能。
-
🛠️ 快速开发:可在短时间内创建交互式机器人控制体验。
-
📚 教学示例:提供全面的教程和示例,便于理解和实施。
-
🗃️ 历史存储:保留本地聊天历史,方便回顾和参考。
快速入门
要开始使用ROS-LLM,请按以下步骤操作:
- 克隆仓库:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1053
1053

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









