






3.1 分布式驱动系统结构概述
分布式驱动根据电机布置位置主要可分为轮边电机驱动和轮毂电机驱动。
分布式电动汽车在底盘布置上具有极大的灵活性,摆脱了传统机械传动的 设计约束,节省了成本和布置空间,其底盘系统传动效率也得到进一步提高, 并且更易于扩展成为多轴或多轮独立电驱动的底盘系统 (图3-1)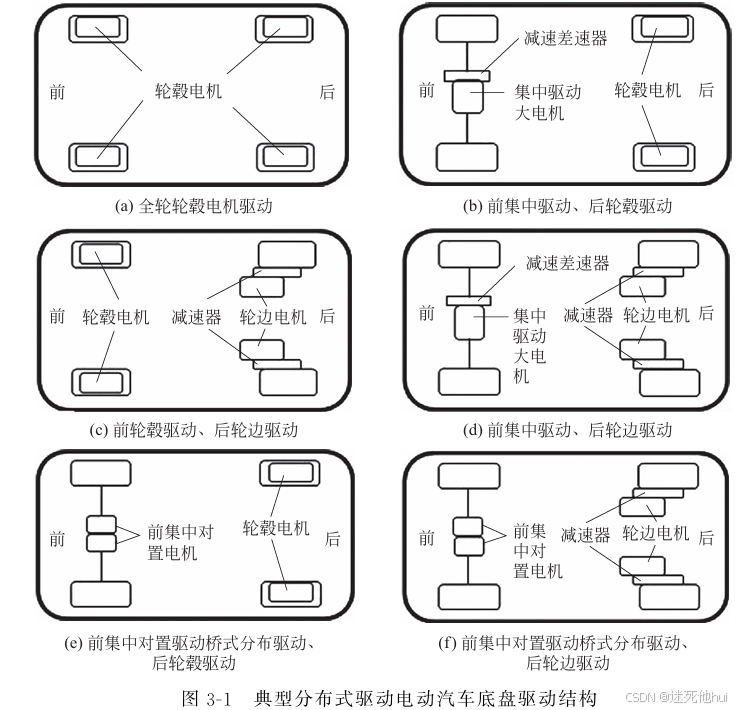
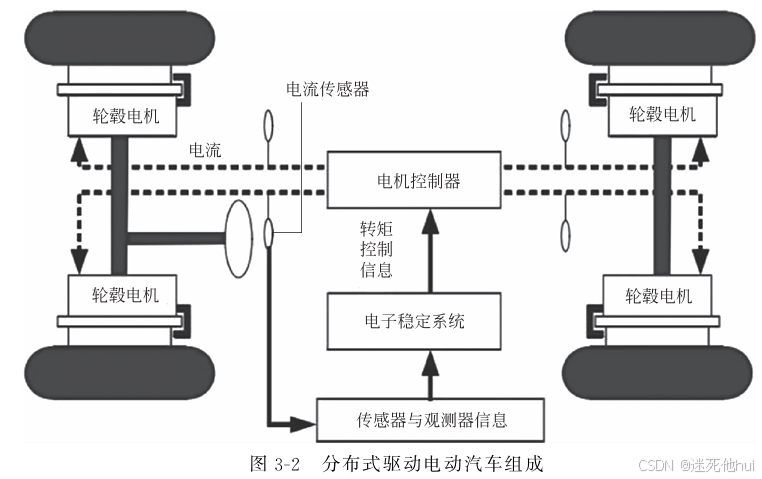
分布式驱动电动汽车组成如图3-2所示。
3.1.1 集中对置的轮边电机结构
集中对置式电驱动总成布置于车架。
其优点是没有轮毂电机带来的簧下质量增大问题,制造技术成熟,应用安装方便;
缺点是传动系统仍需万向传动半轴,且分布电驱动总成仍占用一定的底盘空间。
电机系统主要由轮毂、减速器及电机三部分组成。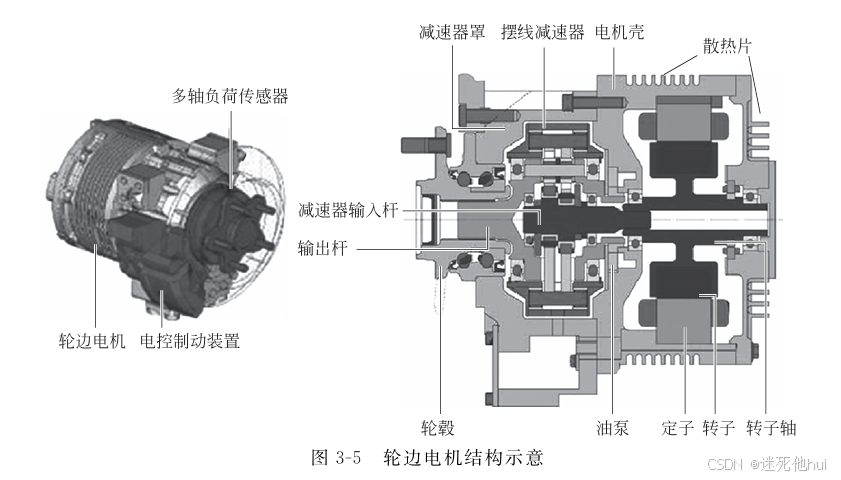
根据轮边电机位置可分为电机固定式和电机摆动式。前者将轮边电机和 轮边减速器固定于车架,轮边电机固定式构型通常为集成式轮边电驱桥的形 式,如图3-6所示。

后者将轮边电机和轮边减速器与悬架集成,如图3-7所示。
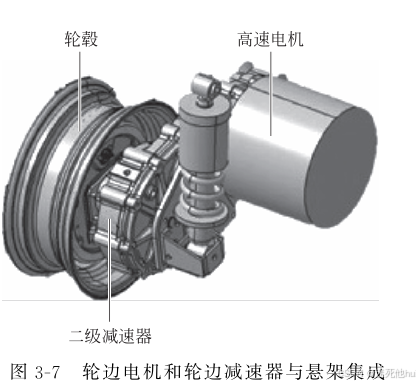
它们的主要特点是电驱动系统的等效簧下质量小,可有效抑制系统簧下质量负效应。
3.1.2 轮毂电机结构
典型轮毂电机结构如图3-9所示。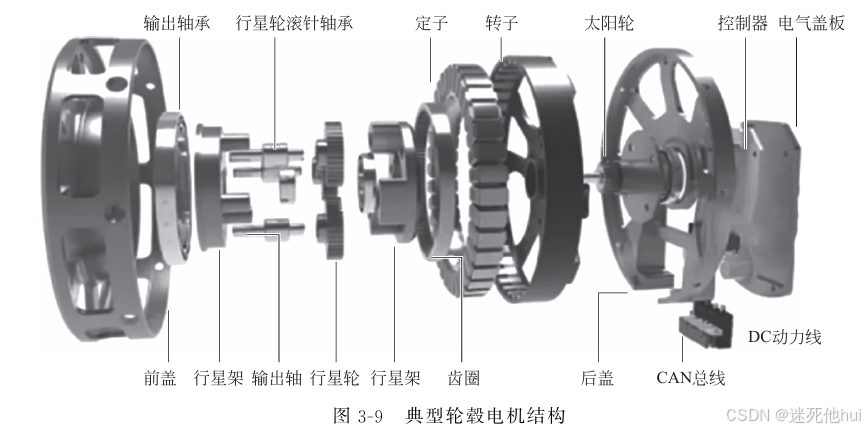
目前轮毂电机驱动的主要缺点是簧下质量显著增加,轮毂电机系统设计制造难度大。如何有效抑制轮毂电机簧下质量负效应,如何解决高效高可靠性轻量化轮毂电机系统设计制造难题,如何降低轮毂电机系统成本,成为其关键问题。
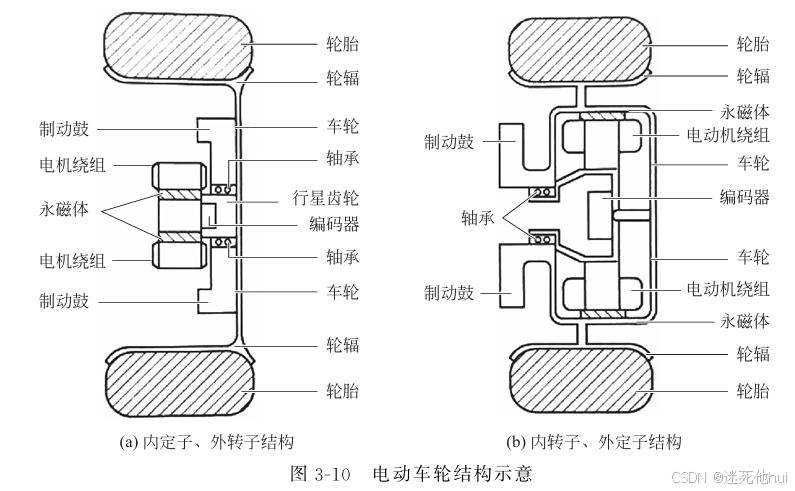
电动车轮是直接将驱动电机安装在汽车的车轮里。
主要有两种结构:一种是内定子、外转子结构,外转子直接安装在车轮的轮毂上,由于这种结构没有 机械减速装置,通常要求电机为低速大转矩的电机;
另一种就是一般的内转子、 外定子结构,转子作为输出轴与固定减速比的行星齿轮变速装置的太阳轮相连, 车轮轮毂与齿圈连接,这样可以提供较大的减速比,增大输出转矩。
两种结构的电动车轮的结构示意如图3-10所示。
3.5 分布式驱动的整车控制结构
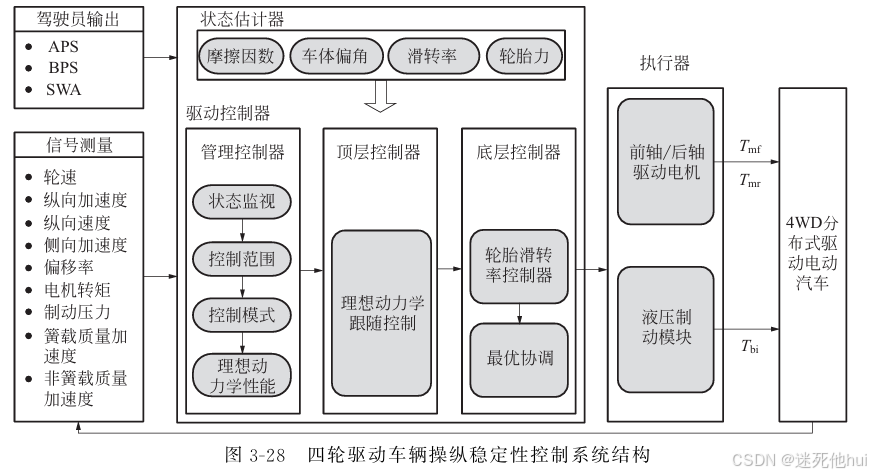
驱动控制算法由以下三部分组成:
1.管理层控制器:用来决定控制模式、允许的控制区域和 期望的动力学性能,包括理想车速和横摆角速度;
2.顶层控制器:用来计算达到 期望动力学性能所需的牵引力输入和横摆力矩输入;
3.底层控制器:用来提出实 际执行器的控制指令,例如前、后轴的电机转矩,以及各自的制动转矩。
管理层控制器计算允许的控制区域,亦即考虑车辆最大转向盘转角、侧向稳定性和防侧翻能力,计算车辆速度和车辆最大转向角度的关系。在底层控制中,设计一个滑转率控制器来将每个车轮的滑转率控制在限制范围内。
分布式驱动电动汽车控制系统也主要采用分层结构,如图3-28所示:
分布式驱动电动汽车四个车轮由四个轮毂电机独立驱动。模型总体结构包 括与传统汽车相同的车体模型、制动器模型、轮胎模型、车轮动力学模型、动态载荷模型等,还包括电动汽车特有的电机模型,以及EHB液压调节器模型。
模型总体框架如图3-29所示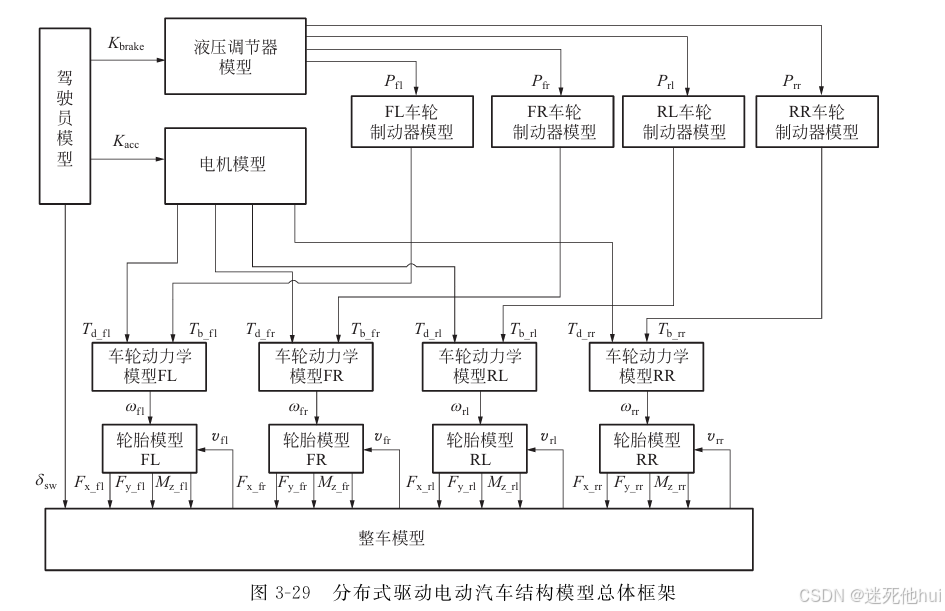

















 1524
1524

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









