







整体介绍:
主要内容介绍:
顶层控制器的控制方法包括:滑模控制(SMC)、LQR控制、PID控制、鲁棒控制、MPC控制等。
底层控制器的分配方法包括:平均分配、最优分配,可定制基于特殊目标函数优化的分配方法。
说明:驾驶员模型采用CarSim自带的预瞄模型(Simulink驾驶员模型请单独购买);速度跟踪可加可不加,采用的是PID速度跟踪控制器。
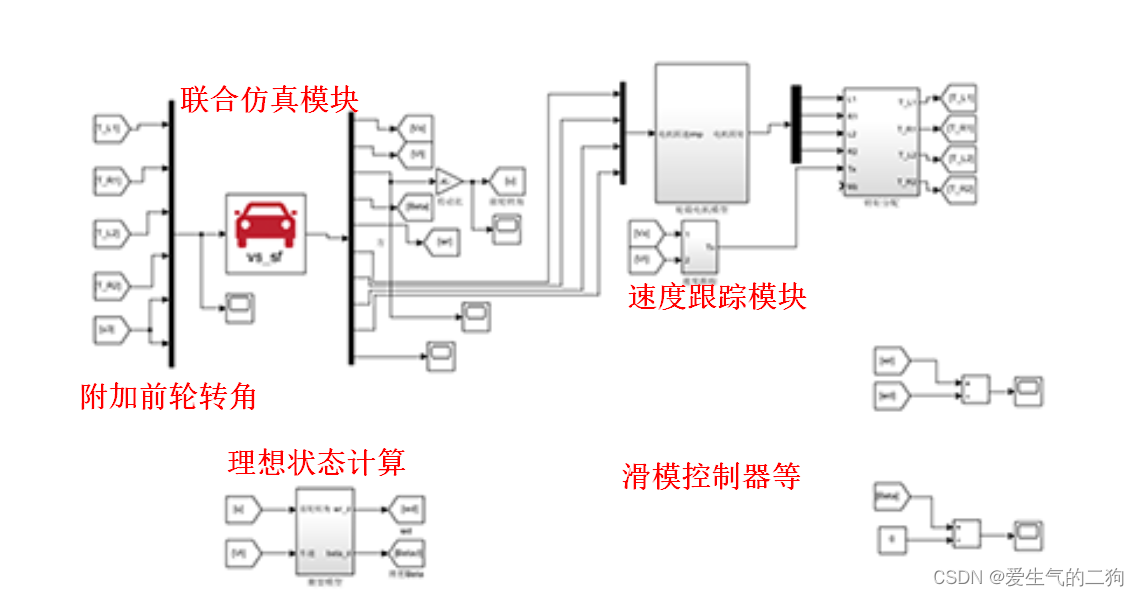
Simulink模型包括:理想状态计算模块、速度跟踪模块、轮毂电机模型、顶层控制器、底层控制器。
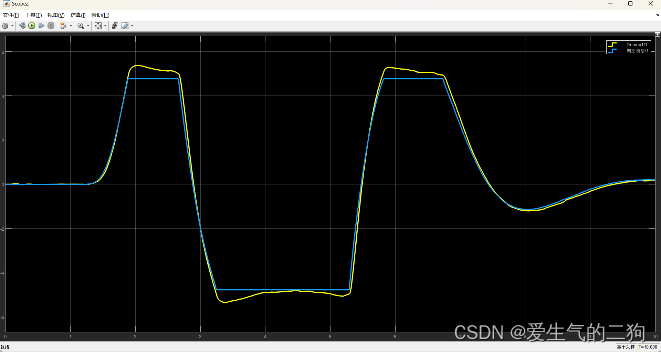
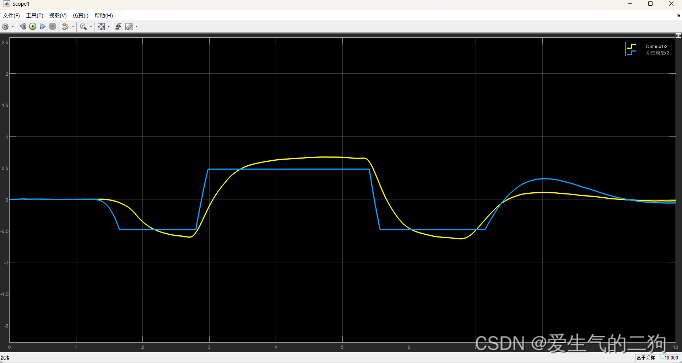
Simulink以及CarSim联合仿真进行验证,效果良好。保证运行成功。项目报告撰写请单独购买。
在这里着重说一下:
1、本账号发布所有的商品内容均是自己以及以前课题组的师兄弟姐妹的成果(征得同意),皆是原创。
2、您在全网看见的跟我们二狗账号发布的图片一样的博客或者文章,均是二手贩子从我们某鱼账号购买后盗用并恶意二次销售!
闲谈:
本人自己以及本人的小伙伴有一些资源,希望能够通过知识付费的形式帮助到一些想要学习相关内容或者节约时间的小伙伴,我们主要研究车辆系统动力学方向,接模型定制、毕设辅导、论文辅导、SCI辅导以及教学等等,您可以相信我们的专业态度。
购买链接:https://m.tb.cn/h.ggIrGmK?tk=KIpwWABOfIv,本人某鱼账号名:爱生气的二狗。或者您可以直接csdn私信我,我会回复您。
最后,希望各位支持原创,感激不尽!















 634
634











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









