









基于MATLAB程序光储直流微网双向dcdc仿真模型
工况1:光伏发电能量>需求能量,多余能量存入蓄电池;
工况2:光伏发电能量<需求能量,蓄电池或超级电容储能单元释放能量,补充不足。
工况3:光伏发电单元瘫痪,由储能单元单独供电。
1.可始终维持光伏发电的最大功率追踪,MPPT。
2.蓄电池充电放电时,双向buckboost均采用双闭环控制,即:直流母线电压外环,蓄电池放电电流内环。在光照变化和负载突变过程中可始终维持直流母线电压的稳定。
3.可始终维持直流母线电压的稳定在220V。
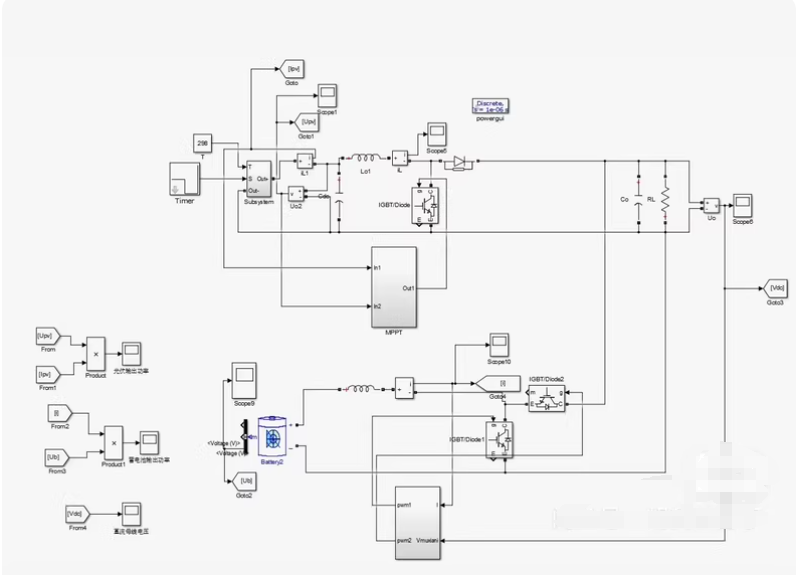
- 整个电路包括:pv数学模型,mppt,boost电路,双向dcdc,buckboost,蓄电池,双闭环控制等。
文章目录
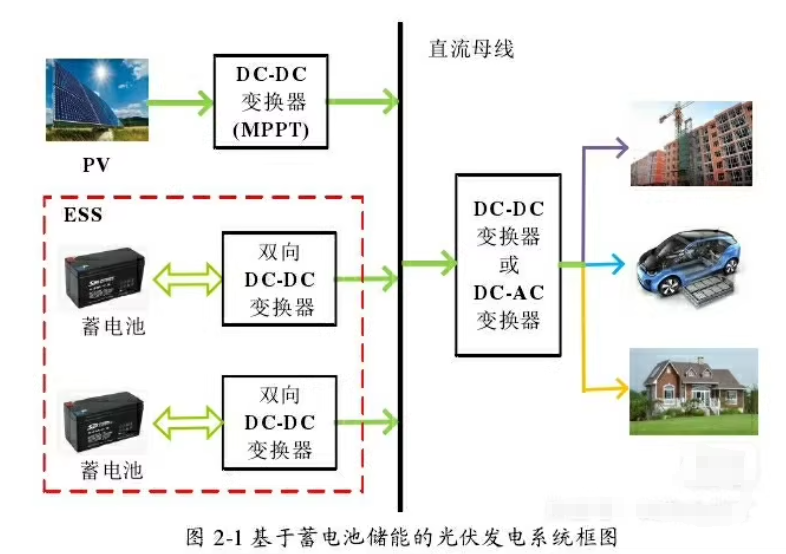
以下是一个基于MATLAB/Simulink的光储直流微网双向DC-DC仿真模型的设计和代码示例。该模型包括光伏发电(PV)、储能系统(Battery)以及负载,通过双向DC-DC变换器实现能量管理和功率流动。
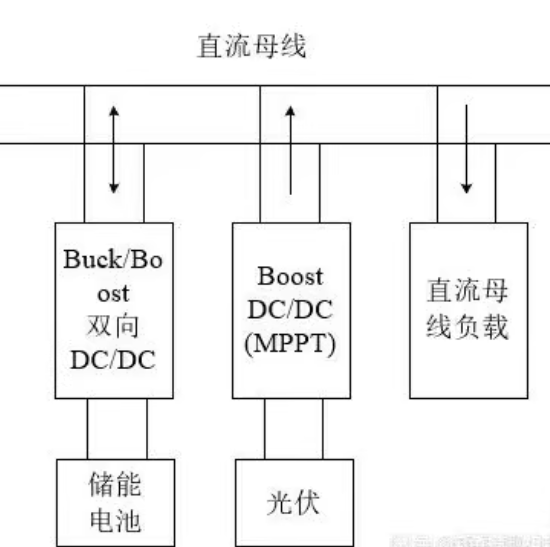
1. 系统概述
该光储直流微网模型包含以下部分:
- 光伏阵列(PV):模拟光伏发电。
- 储能系统(Battery):使用锂电池作为储能单元。
- 双向DC-DC变换器:控制电池充放电。
- 负载:直流负载消耗功率。
- 控制器:基于PI控制调节DC-DC变换器的占空比。
2. MATLAB/Simulink 模型结构
在Simulink中搭建如下模块:
- 光伏模块:使用Simscape Electrical中的光伏板模型。
- 电池模块:使用Simscape Electrical中的锂电池模型。
- 双向DC-DC变换器:由MOSFET和二极管组成。
- 控制模块:实现电压/电流双闭环PI控制。
- 负载模块:电阻负载或动态负载。
3. MATLAB代码和Simulink模型设计
(1) 光伏发电模型
% 光伏阵列参数
Voc = 36; % 开路电压 (V)
Isc = 8.22; % 短路电流 (A)
Ns = 36; % 串联电池片数
Np = 1; % 并联电池片数
% 光伏阵列模型
pv_array = photovoltaic(Pmax=250, Vmp=30, Imp=8.22, Voc=Voc, Isc=Isc);
(2) 储能系统模型
% 电池参数
battery_capacity = 100; % 电池容量 (Ah)
nominal_voltage = 48; % 标称电压 (V)
% 电池模型
battery = Battery(NominalVoltage=nominal_voltage, Capacity=battery_capacity);
(3) 双向DC-DC变换器控制
使用PI控制器调节占空比:
% PI控制器参数
Kp = 0.5; % 比例增益
Ki = 10; % 积分增益
% 电压参考值
Vref = 48; % 目标电压 (V)
% 控制器初始化
pi_controller = pid(Kp, Ki);
% 动态调节占空比
function duty_cycle = calculate_duty_cycle(Vref, Vout)
error = Vref - Vout;
duty_cycle = pi_controller(error);
end
(4) Simulink模型连接
- 将光伏阵列、电池和负载连接到直流母线。
- 使用双向DC-DC变换器控制电池与母线之间的功率流动。
- 在控制模块中实现上述PI控制器。
4. 完整Simulink模型
以下是Simulink模型的主要组成部分:
- 光伏阵列子系统:
- 包含光伏板模型和MPPT算法(如P&O法)。
- 电池子系统:
- 包含锂电池模型和SOC估算模块。
- 双向DC-DC变换器:
- 包含两个半桥电路(充电和放电方向)。
- 控制子系统:
- 包含电压/电流双闭环控制和PWM生成模块。
- 负载子系统:
- 包含固定电阻或动态负载。
5. 示例代码
以下为一个简单的MATLAB脚本,用于初始化参数并运行仿真:
% 初始化参数
Vref = 48; % 目标电压 (V)
Kp = 0.5; % 比例增益
Ki = 10; % 积分增益
% 创建PI控制器
pi_controller = pid(Kp, Ki);
% 运行仿真
sim('DC_DC_Bidirectional_Model.slx');
% 绘制结果
figure;
plot(tout, Vout);
xlabel('时间 (s)');
ylabel('输出电压 (V)');
title('双向DC-DC变换器输出电压');
grid on;
6. 注意事项
- 确保Simulink中所有模块参数匹配实际硬件规格。
- PI控制器参数需要根据系统动态特性进行调整。
- 如果需要更复杂的能量管理策略,可以引入模糊控制或模型预测控制(MPC)。

















 361
361

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









