






目前,具身智能(Embodied Intelligence)通过将自然智能与人工系统相结合,不仅能够有效利用生物体的自然运动和感知能力,还能实现更精准的控制和更高效的环境交互。
最新研究利用水母的自然具身智能构建半机械体,通过量化其运动并结合储层计算预测其行为,为软体机器人研究开辟新方向。
我精心整理了10篇关于【具身智能】的相关论文,感兴趣的同学欢迎diidi~
水母半机械体:利用自然具身智能打造软体机器人
文章解析:
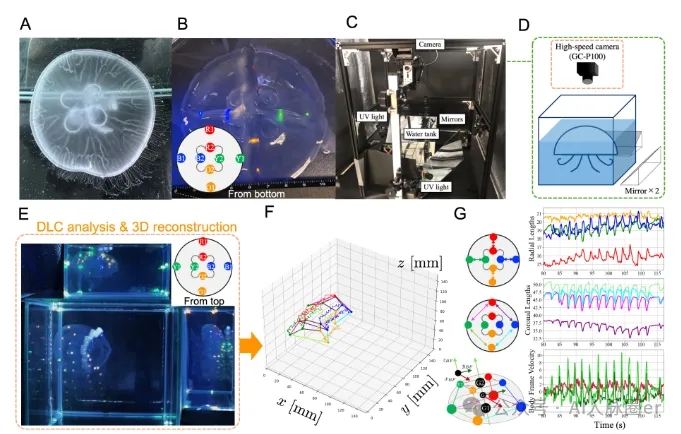
文章提出利用水母的自然具身智能构建半机械体。通过开发集成系统量化水母运动,结合储层计算预测其运动,发现其自发运动的自组织临界性及最佳刺激周期,为开发可自主导航和环境探索的水母半机械体提供了理论与实践基础。
创新点:
1. 首次将水母的自然具身智能融入半机械体设计,为软体机器人研究开辟新方向。
2. 发现水母游泳运动中的自组织临界性,确定最佳刺激周期,有助于实现更精准的运动控制。
3. 运用储层计算成功预测水母运动,为生物运动预测提供新的计算框架和方法。
研究方法:
1. 构建集成肌肉电刺激和3D运动捕捉系统,量化水母自发和刺激诱导行为。
2. 采用储层计算框架,基于水母身体形状和动态模式预测未来运动。
3. 对实验数据进行频率分析、相位响应分析和ESP指数计算,深入探究水母运动特性。
研究结论:
1. 证实水母自发运动存在自组织临界性,其身体运动与电刺激结合可作为计算资源用于预测控制。
2. 确定1.5秒和2.0秒为引发水母连贯可预测游泳行为的最佳刺激周期。
3. 为开发用于海洋监测和污染管理等领域的水母半机械体奠定了重要基础。
在线决策MetaMorphFormer:基于因果Transformer的通用具身智能强化学习框架
文章解析:
文章提出在线决策MetaMorphFormer(ODM)框架,以实现通用具身智能。通过统一模型架构编码时间和形态依赖,采用两阶段训练范式,在多种环境、任务和不同身体形状的智能体上实验,验证了其性能和泛化能力,为通用人工智能研究提供支撑。
创新点:
1. 设计统一模型架构,同时编码时间和形态依赖,将序列决策与具身智能相连接。
2. 提出模拟自然智能形成过程的训练范式,涵盖向他人学习、实践提升和认知世界。
3. 用多种身体形状、环境和任务类型训练和测试框架,验证运动控制通用知识。
研究方法:
1. 构建基于形态 - 时间Transformer的模型架构,结合离线预训练和在线微调。
2. 对比ODM与多个基线方法,在在线、少样本和零样本实验中评估性能。
3. 进行消融实验,验证模型各组件有效性,可视化分析智能体运动合理性和流畅性。
研究结论:
1. ODM在在线学习、少样本和零样本实验中表现出色,能有效处理多种任务和环境。
2. 证明向他人学习和自我经验强化对智能体的重要性,模型组件协同有效。
3. 为通用人工智能在具身和认知领域的研究做出贡献,推动相关领域发展。

















 529
529

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









