






芯片概述:荷鲁斯之眼是国内自主研发的高可靠飞控芯片系列,早在2016年发布了首款产品,填补了我国在飞控核心器件上的空白,打破了对进口芯片的依赖。它将飞控所需的计算单元与惯性传感单元高度集成于一体,具备实时姿态解算和飞行控制能力,是一个“软硬件一体化”的飞控系统单芯片。荷鲁斯之眼芯片面向工业级无人机应用,强调在复杂环境下的稳定性与安全性,其结构设计充分考虑了抗扰动和高可靠要求。
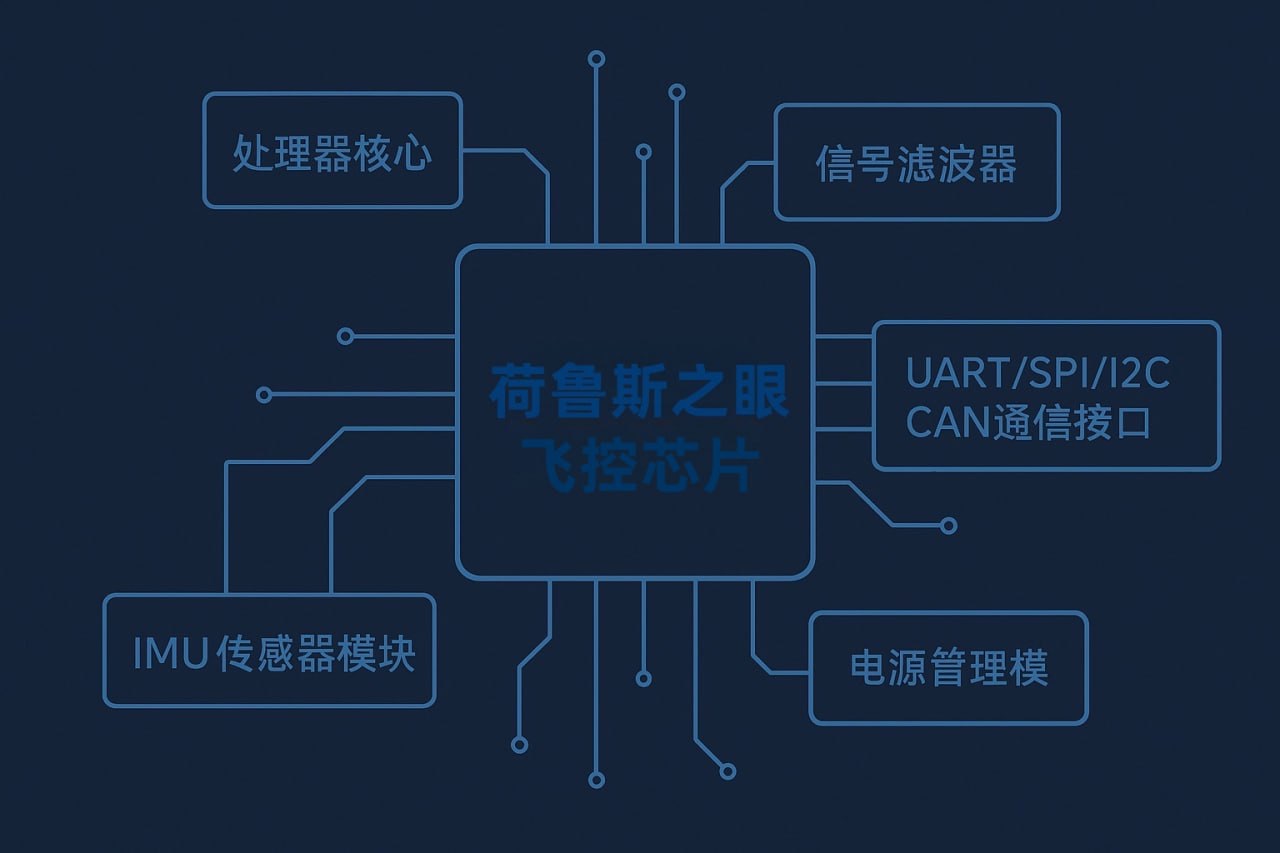
结构设计:荷鲁斯之眼采用SoC架构,内部集成了高性能处理器内核和先进的MEMS惯性传感器模块。处理器内核提供实时运算能力,可为姿态解算、飞行控制律和导航算法提供充裕的算力;同时片上集成的陀螺仪/加速度计传感模块能够以高采样率输出三轴运动数据,直接供内部算法使用。相比传统“MCU + 外接IMU”的方案,这种单芯片架构省去了传感器外部通信延迟,提升了控制回路的频率和稳定性。
 此外,荷鲁斯之眼内部还包含传感信号调理与数字滤波电路,可对原始陀螺信号进行温度补偿和去噪处理,降低环境因素对姿态解算的影响。芯片提供标准外设接口(如UART、SPI、I2C、CAN),便于连接外部的磁力计、气压计、GPS模块等传感/导航设备和执行机构,构成完整的飞控系统。
此外,荷鲁斯之眼内部还包含传感信号调理与数字滤波电路,可对原始陀螺信号进行温度补偿和去噪处理,降低环境因素对姿态解算的影响。芯片提供标准外设接口(如UART、SPI、I2C、CAN),便于连接外部的磁力计、气压计、GPS模块等传感/导航设备和执行机构,构成完整的飞控系统。
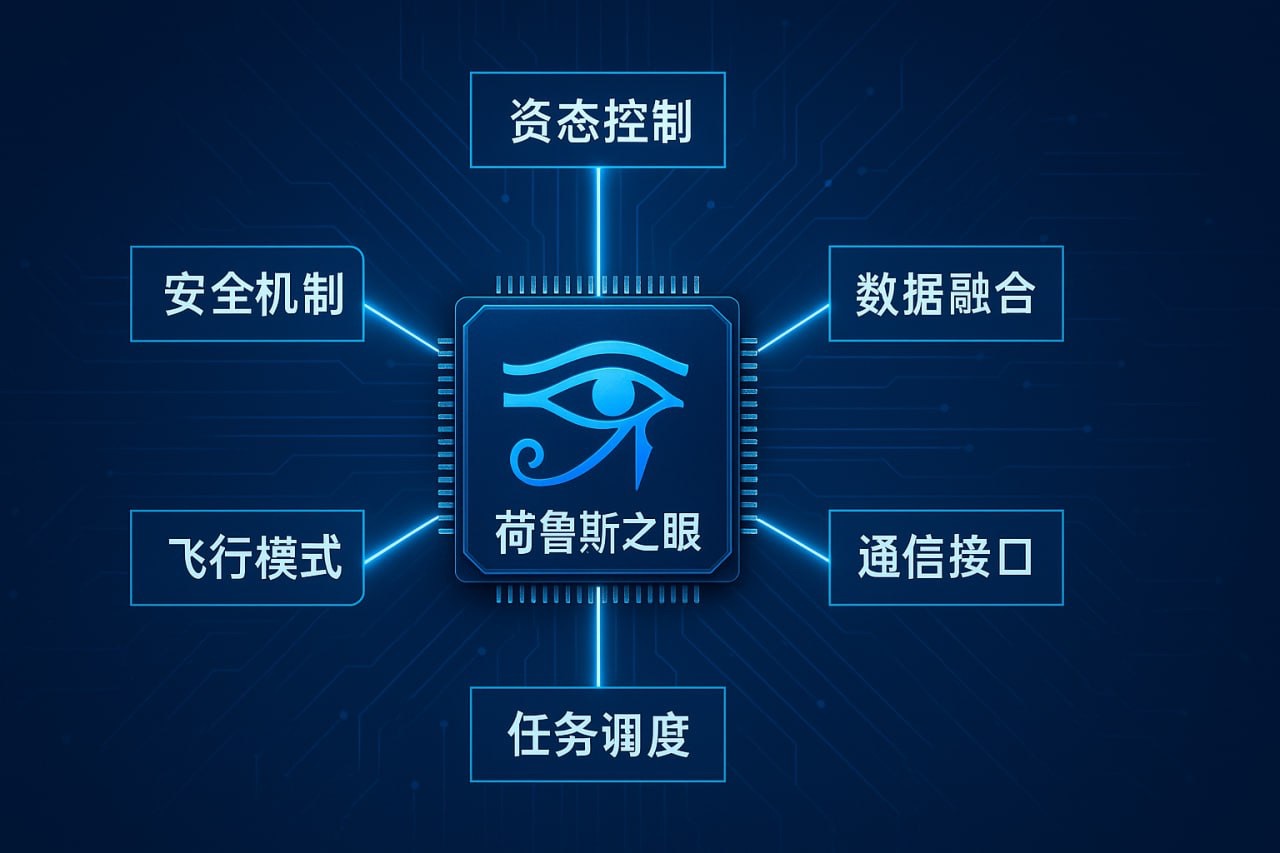
**核心功能:**作为飞控系统的大脑,荷鲁斯之眼芯片具备完整的无人机姿态和航向控制功能。
 其核心功能模块包括:
其核心功能模块包括:
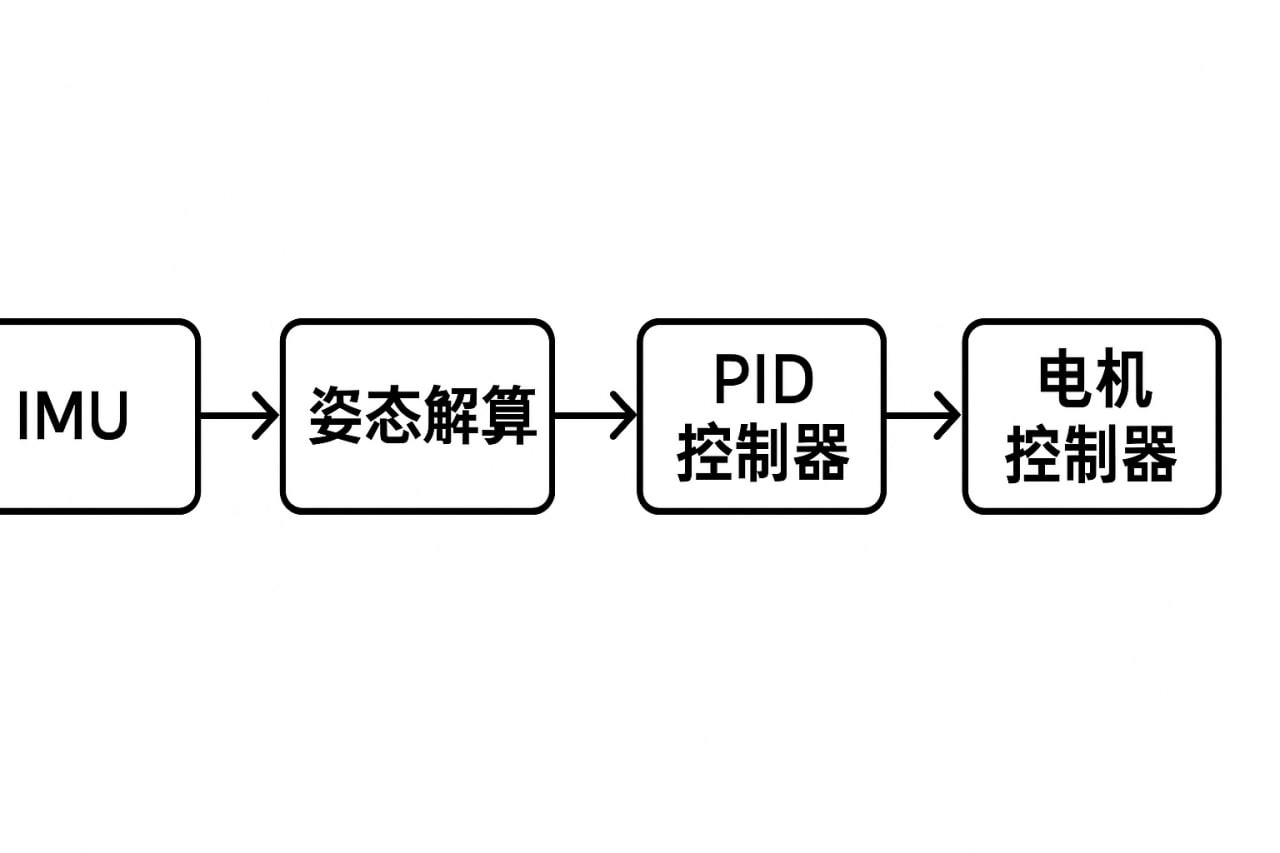
**姿态解算与控制律模块:**利用片上IMU数据,实时计算无人机的姿态(滚转、俯仰、航向)和角速度,结合控制算法产生舵机/电机控制指令,维持飞行器稳定悬停与机动飞行。高效的实时处理单元保证了控制回路的高刷新率和低延迟,使飞行更加平稳可靠。
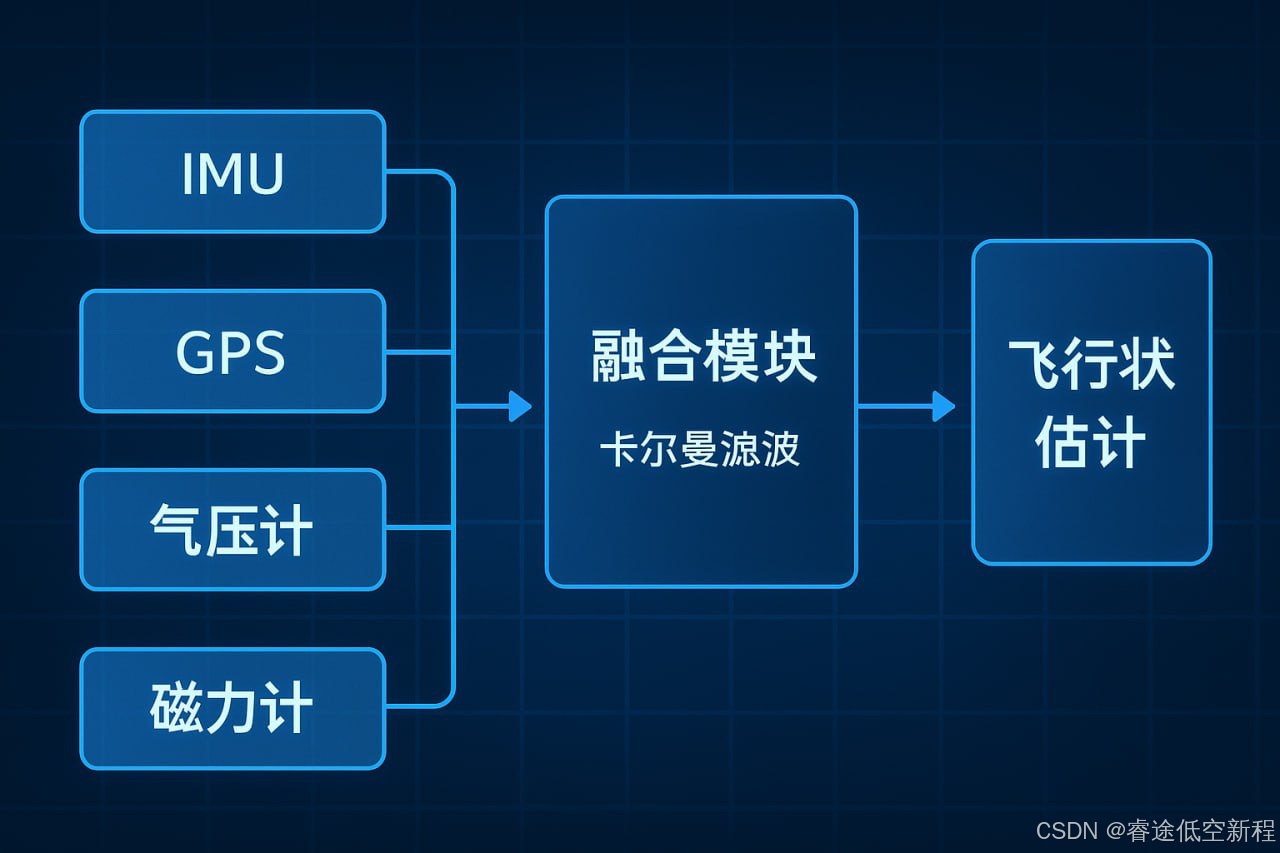
**传感数据融合模块:**将IMU、磁罗盘、GPS、气压高度计等多源数据进行融合,估计无人机的空间位置和速度。融合算法运行在芯片内核上,可采用卡尔曼滤波等方法,提高定位和姿态计算的精确性,即使在单一传感器异常时仍能保持对飞行状态的可靠感知。
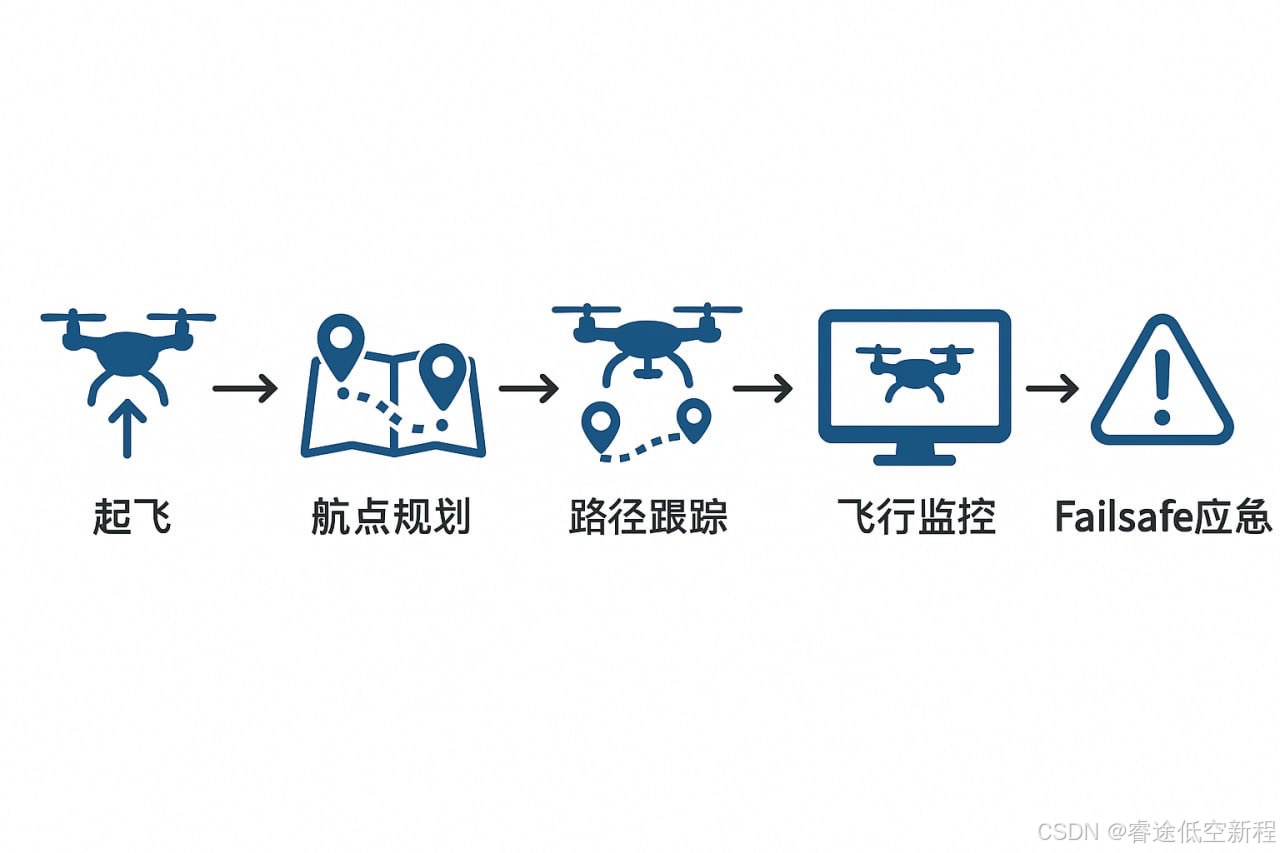
**自主导航与任务管理:**芯片内可运行预先编程的航迹规划和任务脚本,实现自主导航飞行。它支持设定航点路线、巡航速度、高度等飞行计划,并在飞行中监控任务进展。如果偏离计划或出现异常,芯片能触发预设的Failsafe机制(如悬停、返航)。
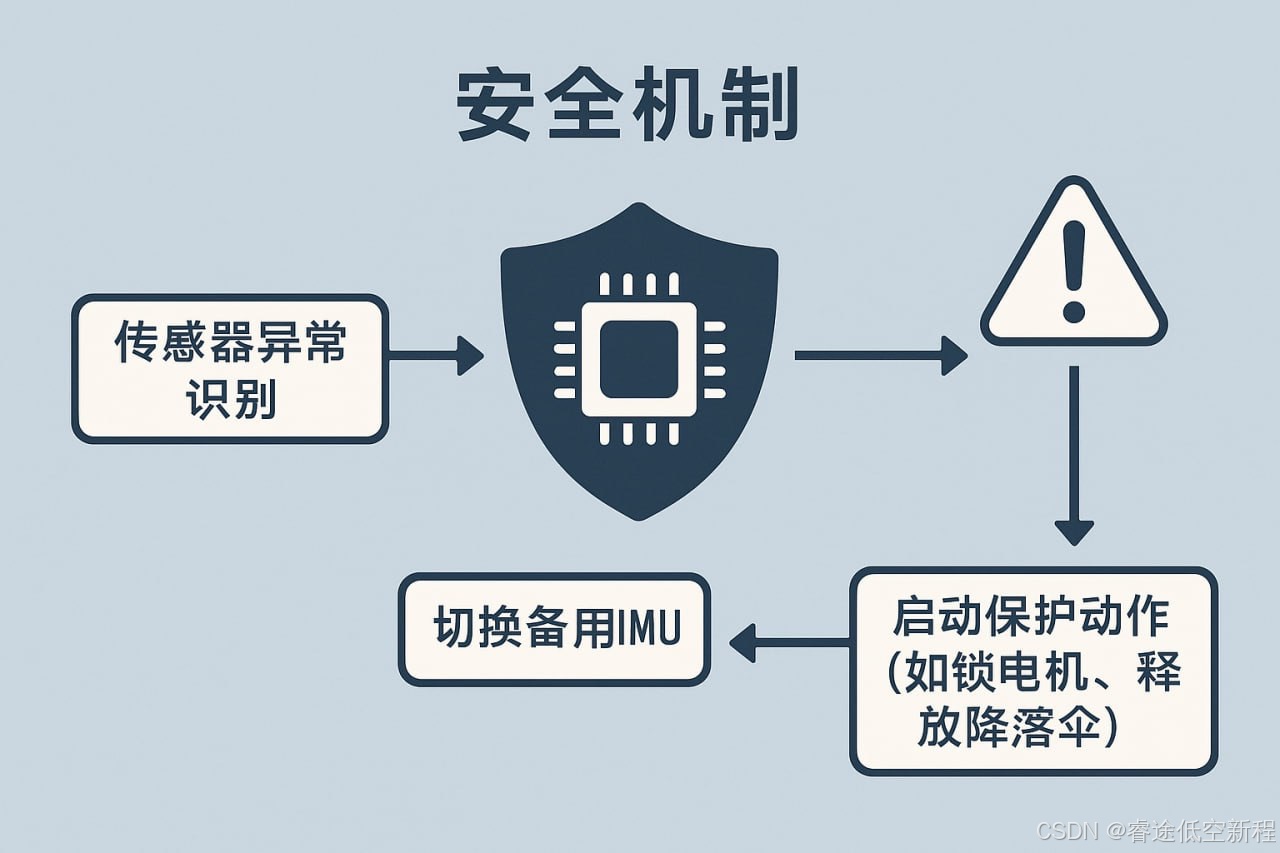
故障监测与安全管理:荷鲁斯之眼内建看门狗和故障检测机制,实时监控芯片运算状态和传感器健康。当检测到姿态控制失稳或传感器数据异常时,安全模块能够自动介入,执行保护动作(如切换冗余传感器、触发降落伞、锁定电机等)。这些安全功能提升了系统的内在容错能力,对高安全性飞行至关重要。此外芯片还可选配加密安全单元,确保飞控固件和通信不被未授权篡改。
优势模块与特色:
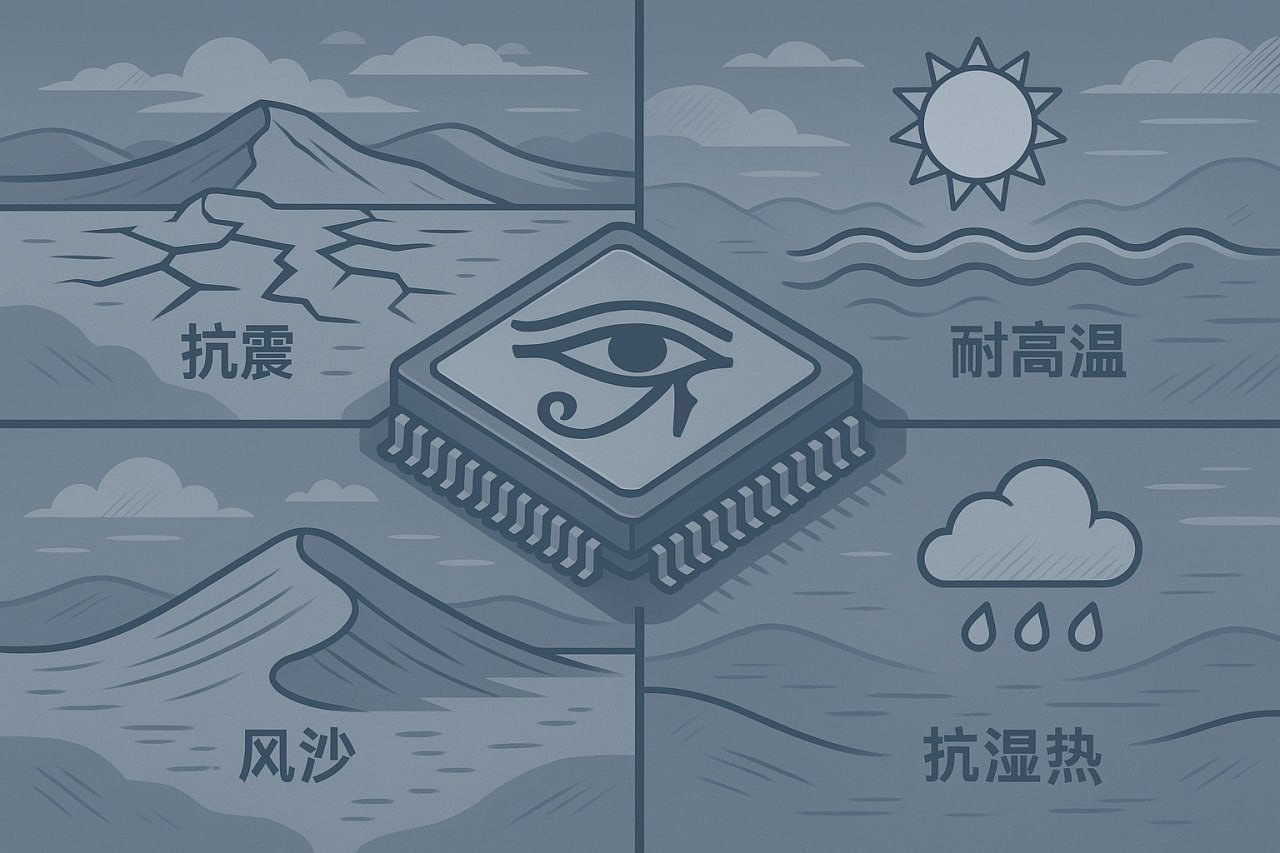
国产自主与高可靠性:作为自主研发的飞控SoC,荷鲁斯之眼在设计时充分考虑了中国本土应用环境的需求,具备全天候、高抗扰和高安全的特点。例如,芯片经过特殊抗振动、防尘、防温漂处理,可在沙漠、高寒、高湿等极端环境下可靠工作。2023年该芯片完成了戈壁极端气候测试,产品升级达到“中国式可靠”标准,证明其在高温巨风、沙尘环境中的稳定性。这种环境适应性对于低空物流、应急救援等场景尤为重要,也是荷鲁斯之眼相对于通用芯片的突出优势。
高度集成与低延迟:荷鲁斯之眼将陀螺仪等关键传感器与运算单元集成,构成片上闭环控制系统,使传感到控制的延迟降至最低。这种陀螺-控制一体化设计减少了外部连线和数据传输的环节,提高了系统抗电磁干扰能力和可靠性。高集成度还带来了体积和功耗的下降,方便飞控系统在小型化无人机甚至弹载、便携设备中应用。
模块化功能单元:芯片内部划分为若干功能模块(IP核),彼此独立又协调工作。例如姿态传感模块、导航计算模块、通信接口模块等相互解耦,既保证了实时性能,又方便根据应用裁剪功能。特别是通信接口模块支持多种总线标准和协议栈,可灵活接入不同外围设备和上位系统,实现软硬件解耦。
高安全冗余设计:为保证飞行安全,荷鲁斯之眼在关键部分采用冗余设计。除了支持外接冗余IMU/卫星定位外,芯片的软件架构也支持传感数据的交叉验证和异常检测。一旦某传感器数据超出可信范围,系统将报警并可平滑切换到备份数据源,增强系统抗故障能力。此外,芯片内部的安全隔离设计(如关键运算与通信接口分开调度)确保即使外设通信堵塞也不影响核心控制循环的执行,保证飞控始终“稳”字当头。
总的来说,荷鲁斯之眼芯片通过专用的结构设计,实现了传感-计算-控制的高度融合,提供了无人机自主飞行所需的全部核心功能。在复杂多变的环境和任务中,其高集成度、高可靠性和国产自主优势使其成为支撑低空飞行器安全运行的关键硬件基础。

















 622
622

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









