






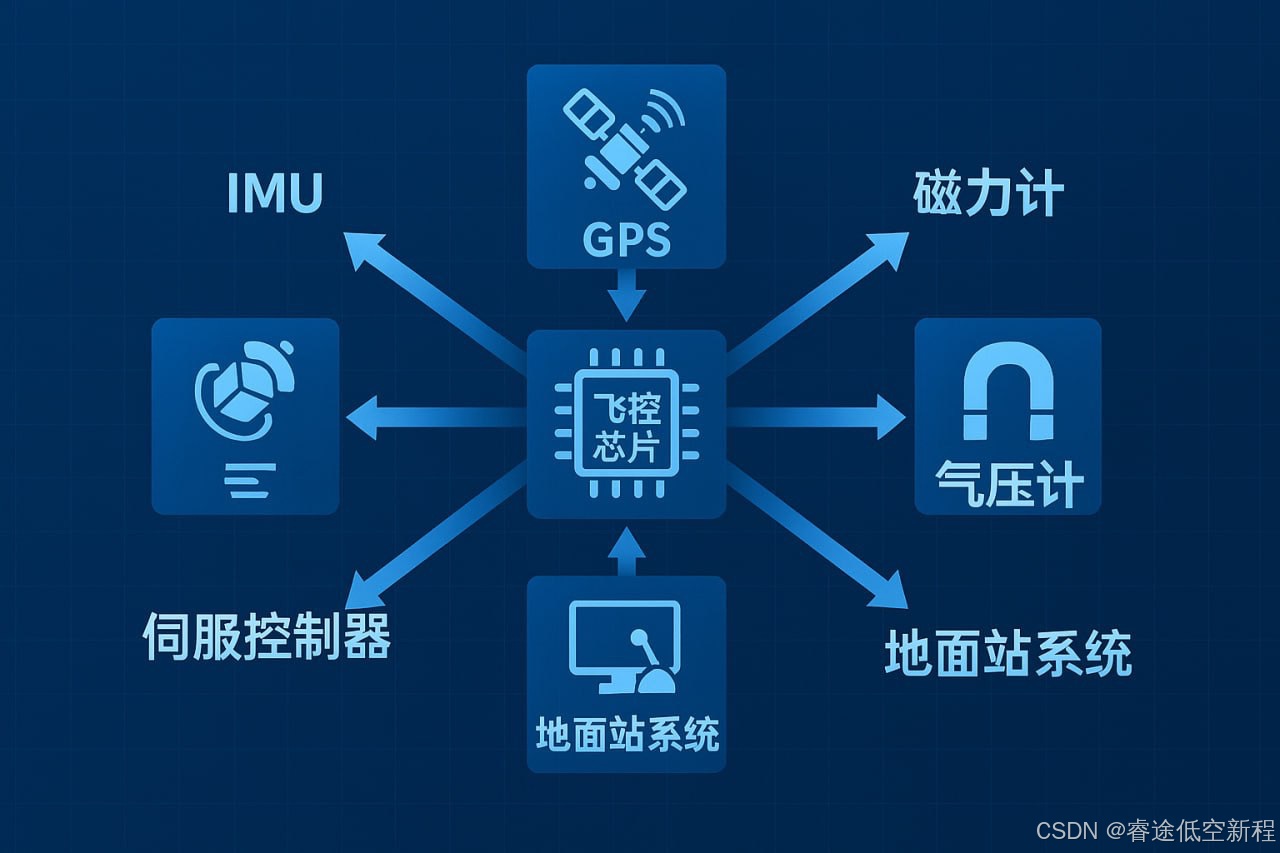
现代无人机飞控芯片通常采用高性能的32位微控制器作为核心,搭配多传感器融合技术来实现自主飞行控制。
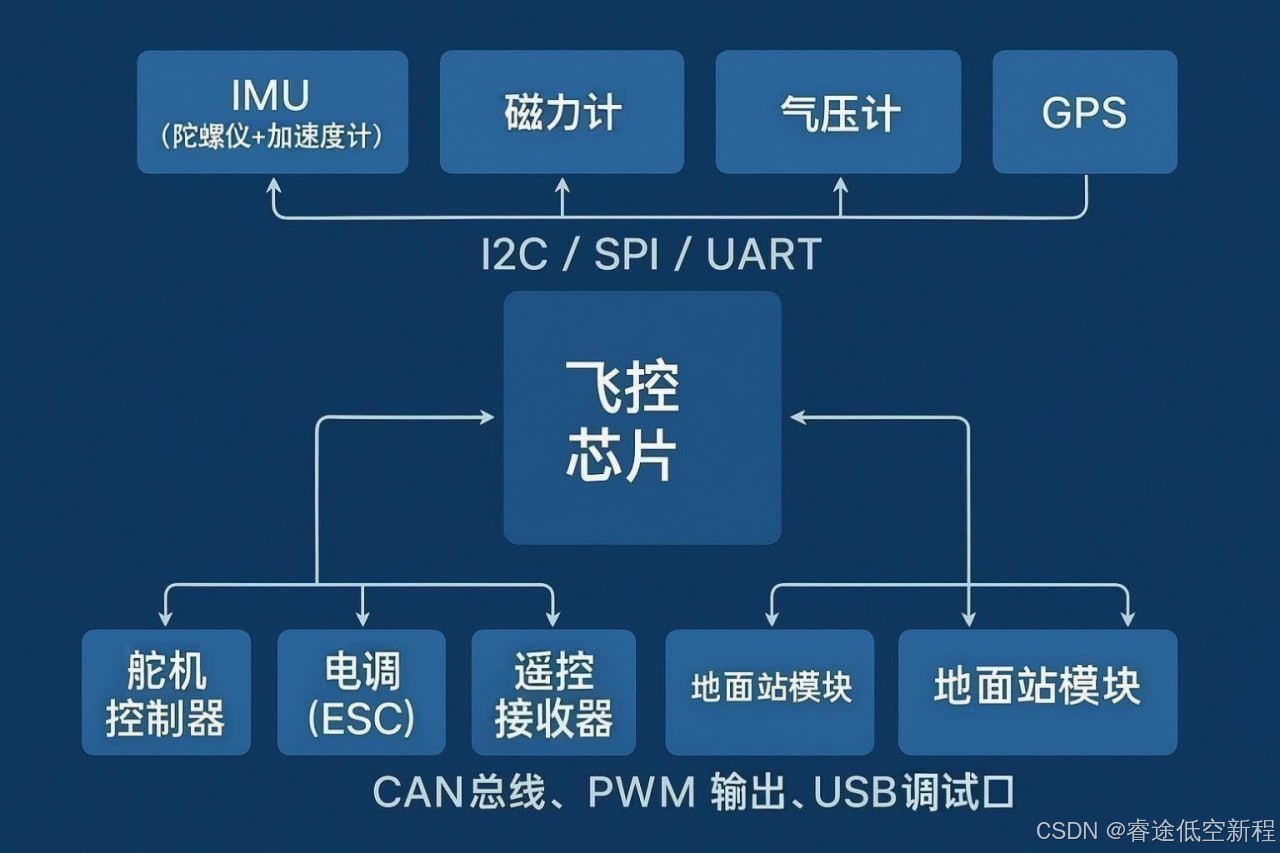
飞控系统架构一般包括:惯性测量单元(IMU,包含陀螺仪和加速度计)、磁力计、气压高度计、GPS等传感器,由飞控芯片高速采集数据并执行控制算法,控制无人机的姿态与航迹。
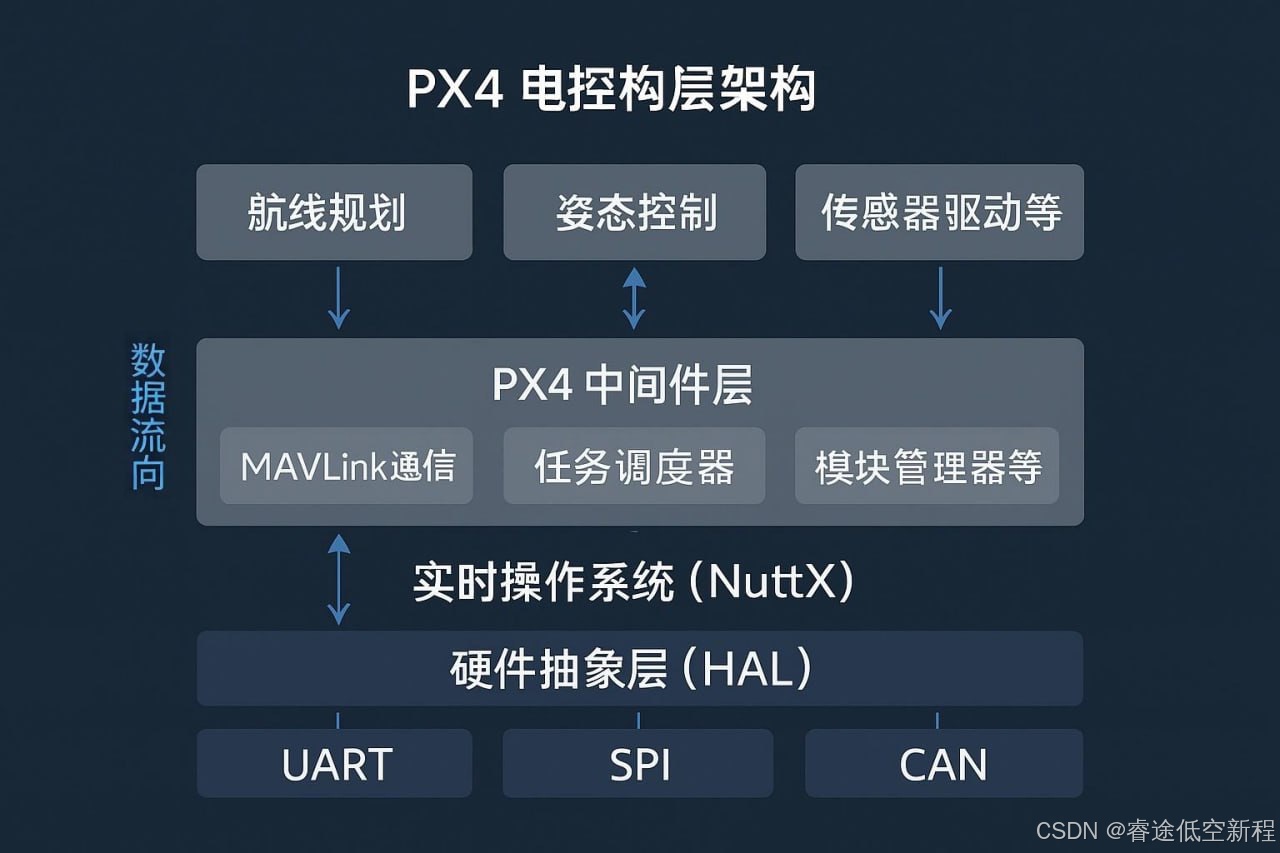
典型的飞控芯片架构基于ARM Cortex-M系列微控制器,运行实时操作系统(如NuttX或ChibiOS)以及飞控算法软件(如PX4或ArduPilot),通过串口、I2C、SPI等接口与外部模块通信,实现闭环控制。
技术趋势:
更高性能的处理器:飞控芯片正朝着多核化、高主频方向发展,以支持更复杂的控制算法和任务。例如Pixhawk 6X-RT控制器采用NXP i.MX RT1176双核MCU(包含最高1GHz的Arm Cortex-M7和400MHz的M4内核),具有2MB SRAM和64MB闪存。更强大的算力和内存使飞控固件能够运行更高级的控制模型和智能算法,实现更精细的控制和数据处理。这体现了飞控芯片由传统单片机向“跨界”MCU发展的趋势。
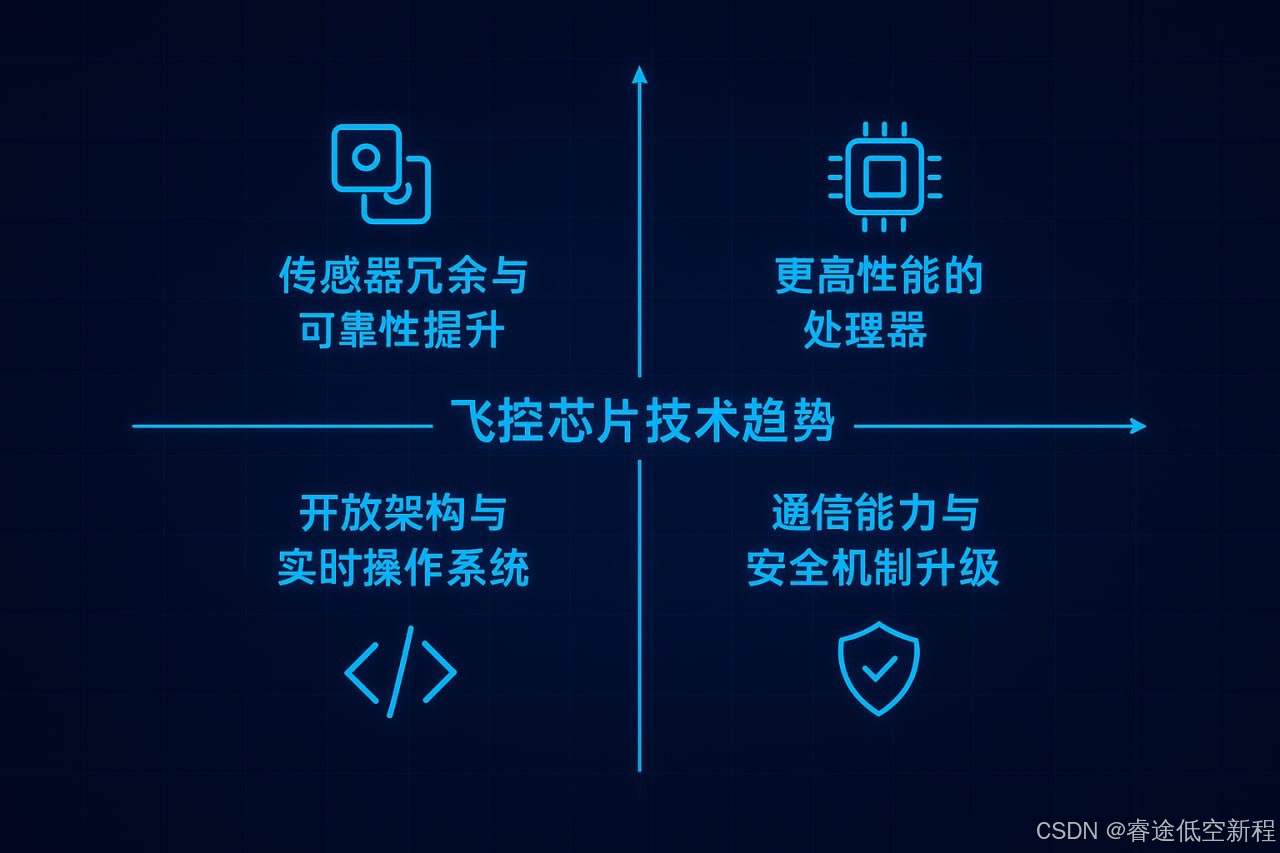
**传感器冗余与可靠性:**为了提升飞行安全,主流飞控逐步引入传感器冗余和抗扰设计。高端架构往往集成多套IMU和双套气压计,并通过总线隔离和震动隔离措施来保证传感数据可靠。
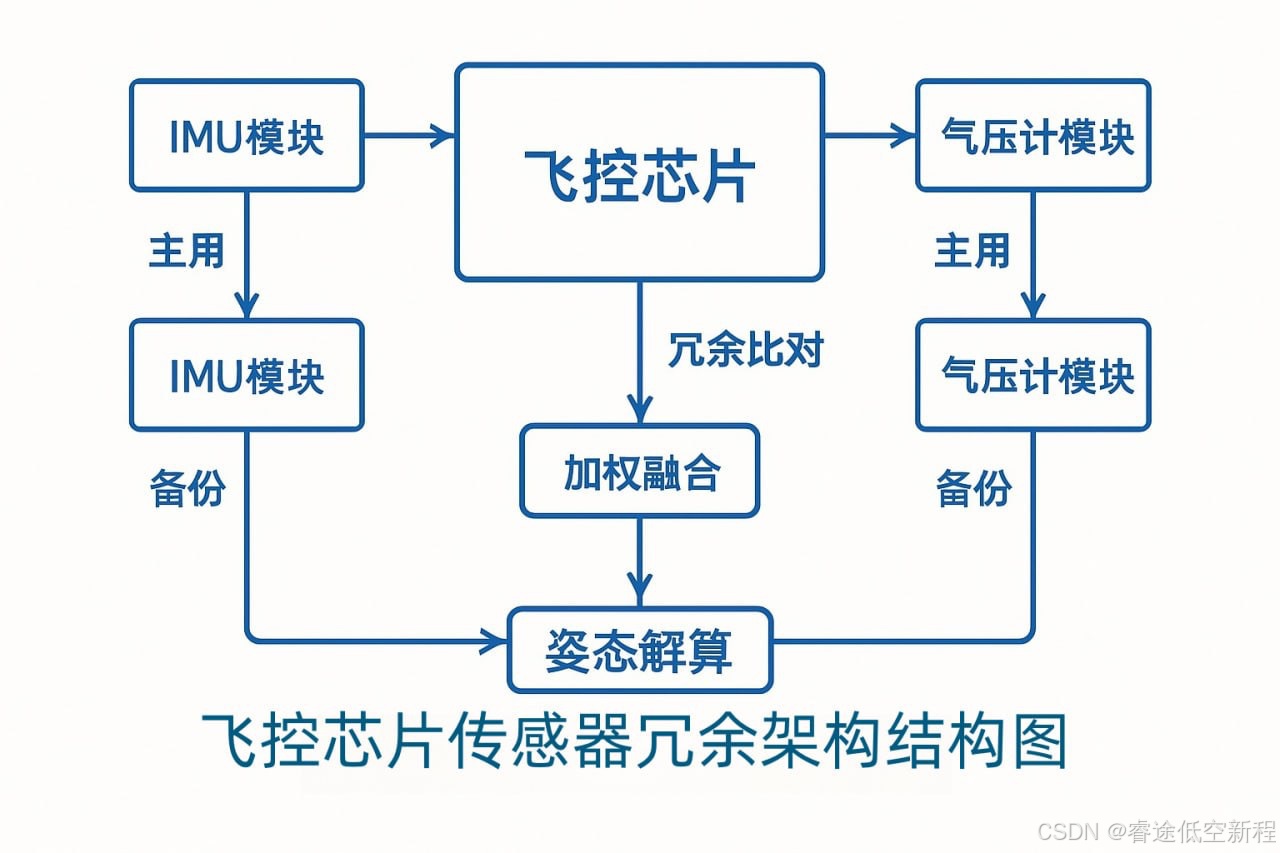
此外,飞控硬件加入减振隔离、独立电源滤波等设计以降低高频振动和电磁干扰对测量和控制的影响,提升全天候工作能力。
**开放架构与实时操作系统:**使用开源实时OS已成为飞控软件架构主流,以获得更好的模块化和跨平台支持。例如PX4飞控固件构建于NuttX实时操作系统之上,并采用模块化架构,方便移植到不同硬件平台。这种开放架构使得飞控芯片可以共享社区成熟的软件生态,并简化适配主流算法的流程。近年来社区已成功将PX4+NuttX移植到RISC-V架构等新硬件上,表明飞控软件对不同指令集和芯片架构的兼容性在增强。
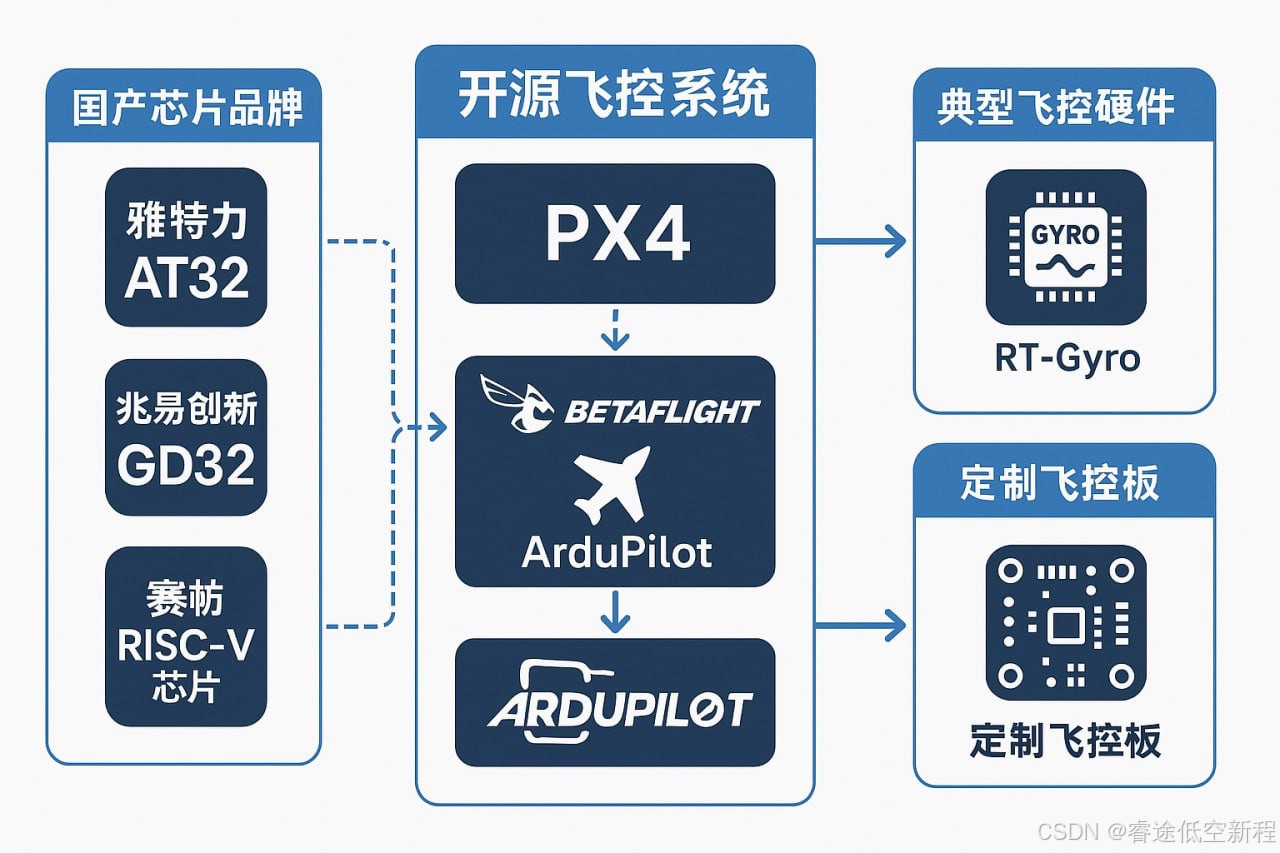
**新架构及国产替代:除了传统ARM架构,RISC-V等新兴处理器在飞控领域开始受到关注,以提升自主可控和安全特性。例如阿布扎比的研究机构已将PX4飞控栈移植到自主研发的RISC-V飞控板上,并完成测试验证。这意味着未来飞控芯片可能出现更多样的CPU架构选择。在中国,由于自主可靠性的需求,国产MCU正逐步融入开源飞控体系:雅特力AT32等国产ARM架构芯片已经成功移植到Betaflight、iNav、PX4等开源飞控项目上。虽然ArduPilot等平台对国产MCU的支持仍在推进,但可以预见国产芯片在飞控中的应用比例将持续上升。同时,国内厂商也在探索“通感算控一体化”**的飞行控制网络,将通信、感知、计算与控制深度融合,以适应未来城市低空交通的需求。
安全与通信升级:飞控芯片的通信能力和安全性也在不断提升。传统UART和SPI总线仍是主要数据通道,但越来越多的新一代飞控引入CAN总线(如DroneCAN/UAVCAN)来连接智能部件,以提高数据完整性和抗干扰能力。部分高端飞控甚至集成了以太网PHY接口,用于与任务计算机进行高速数据交换。在安全性方面,加入硬件加密芯片/安全模块(如NXP EdgeLock等)成为趋势,用于飞控身份鉴别和数据加密,保障飞行控制不被恶意篡改。总体来看,当前飞控芯片技术正朝着高性能、多冗余、开放兼容、安全可靠的方向演进。
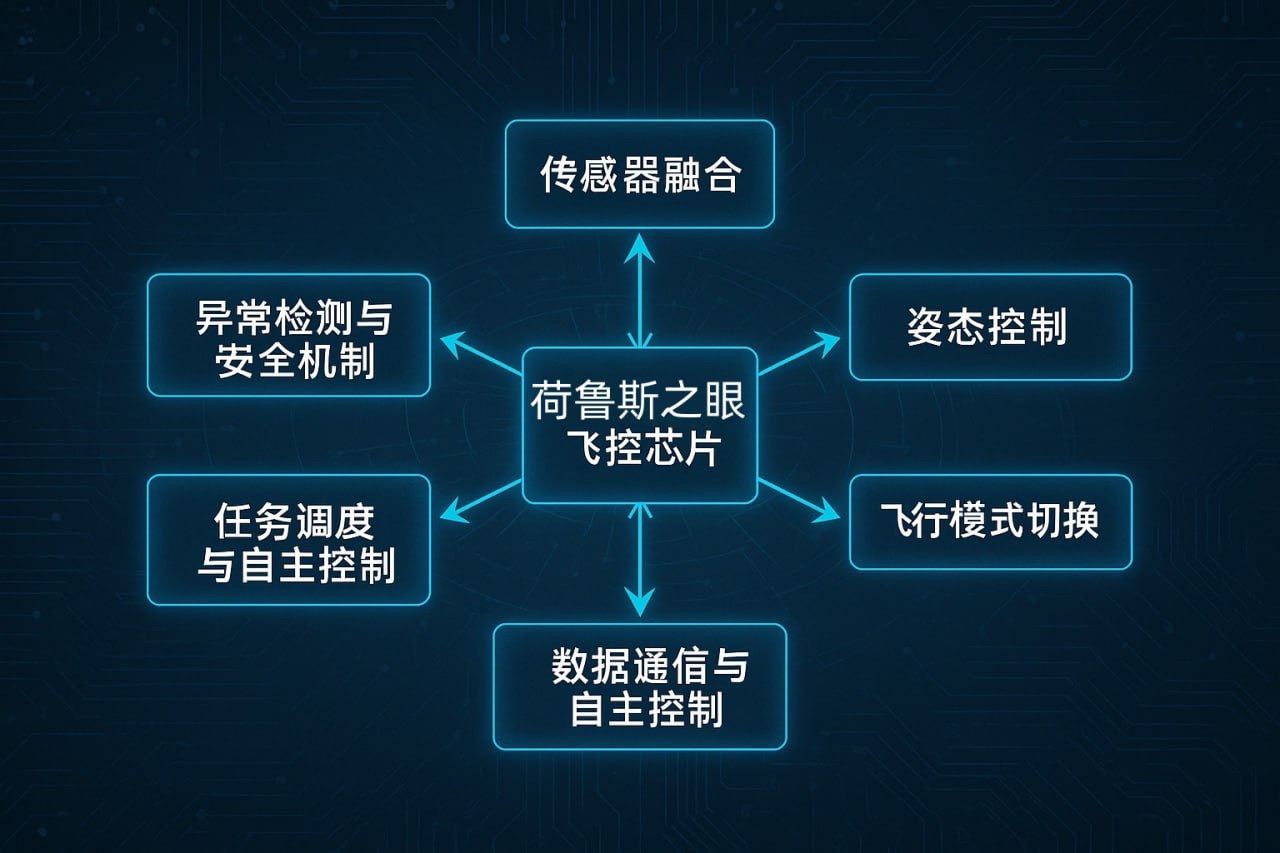
荷鲁斯之眼芯片的结构设计、核心功能与优势模块

















 2094
2094

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









