






b样条曲线 路径规划 轨迹规划 阿克曼转向车辆 控制
ID:9922633106691574
DandD
在现代交通系统和自动驾驶技术的发展中,路径规划和轨迹规划是至关重要的领域。随着智能汽车和无人驾驶技术的不断进步,越来越多的研究者开始关注如何通过优化路径和规划有效的轨迹来提高驾驶的安全性和效率。在这方面,b样条曲线和阿克曼转向车辆的控制是两个重要的技术。
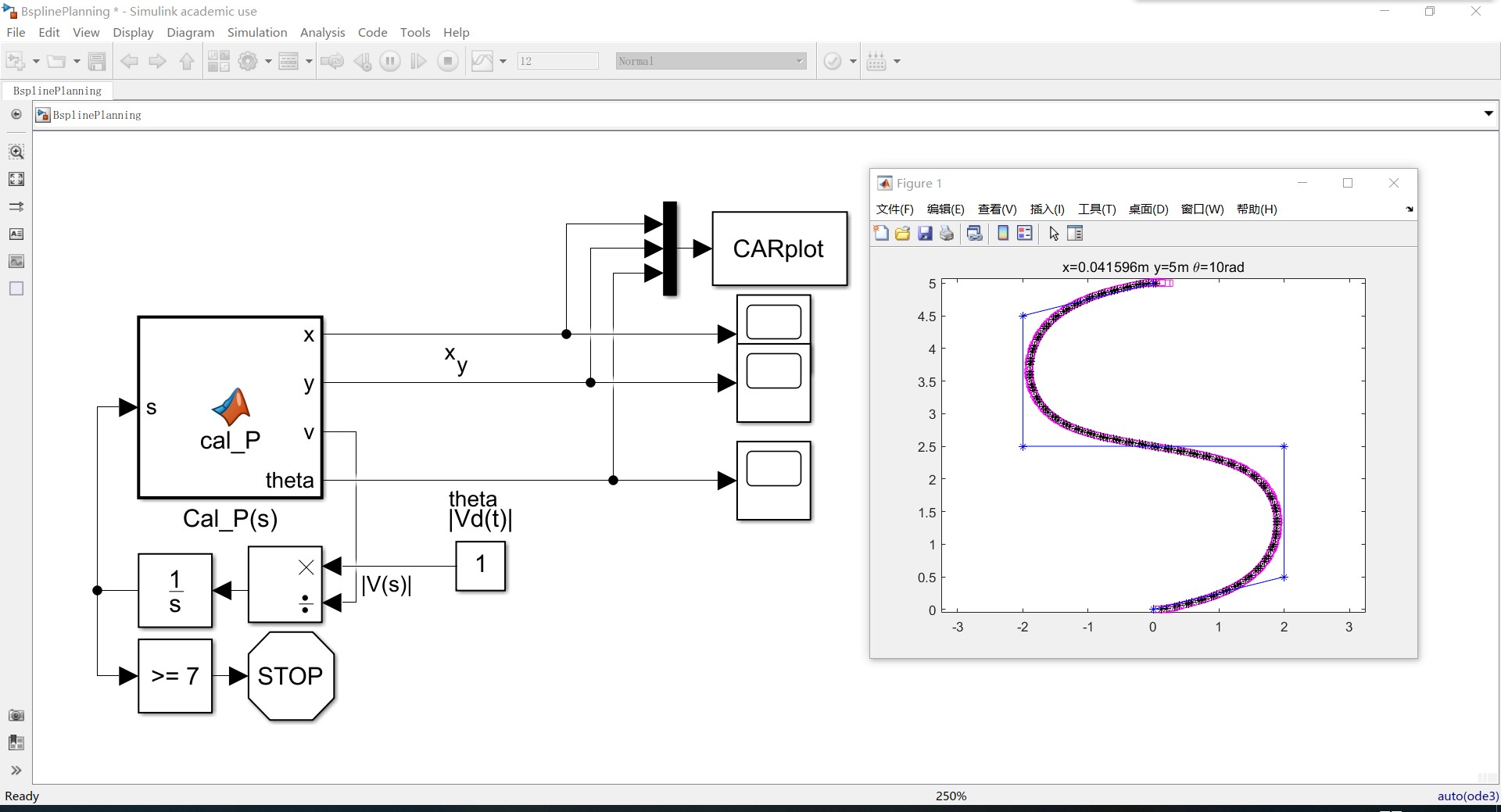
b样条曲线是一种灵活而高效的数学工具,常常用于路径规划和轨迹规划中。它具有平滑性和局部控制性的特点,使得在复杂环境中生成连续和平滑的路径成为可能。b样条曲线的优势在于其能够以自由度较低的函数逼近复杂的曲线形状。因此,在路径规划中使用b样条曲线可以减少计算量和存储空间的消耗,提高计算效率。
在路径规划和轨迹规划过程中,阿克曼转向车辆的控制是一个关键问题。阿克曼转向是一种特殊的转向机构,通过调整车辆前轮的转向角度来实现转弯。通过合适的转向控制算法和路径规划算法,可以使得阿克曼转向车辆能够稳定地沿着规划好的路径行驶,同时实现较小的转弯半径和平稳的转向过程。
在路径规划和轨迹规划中,控制方法起着至关重要的作用。控制方法决定了车辆在实际行驶过程中如何根据规划好的路径进行转向和调整。一种常用的方法是基于模型预测控制(MPC)的方法,该方法通过建立车辆的动力学模型,并在每个时间步骤上根据当前状态和目标状态进行优化和调整。MPC方法可以在短时间内做出相应的控制决策,并且具有较强的鲁棒性和适应性。
除了路径规划和轨迹规划,还有一些其他的技术和方法可以提高驾驶的安全性和效率。例如,传感器融合技术可以将多个传感器的信息进行融合,从而提高对周围环境和交通状况的感知能力。同时,机器学习和人工智能技术的应用也可以帮助驾驶系统更好地理解和应对各种复杂的交通场景。
综上所述,路径规划和轨迹规划是现代交通系统和自动驾驶技术中的重要问题。通过使用b样条曲线和阿克曼转向车辆的控制,可以实现有效的路径和轨迹生成。控制方法和其他相关技术的应用也可以进一步提高驾驶的安全性和效率。随着技术的不断发展和创新,我们相信自动驾驶技术将会在未来的交通系统中发挥越来越重要的作用。
相关的代码,程序地址如下:http://imgcs.cn/633106691574.html
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









