







Gazebo构建小车模型并通过ROS控制
介绍
突然想试试Gazebo这款仿真软件,因为它可以让你在任何时候都有机器人玩。但Gazebo的机制也比较复杂,所以还是先学习一下如何搭一个简单的小车,并通过ROS平台完成对小车的控制。
编写车子的URDF文件
这里是跟着《ROS机器人开发》书中的介绍一步步来的,对详细过程有兴趣的朋友去看一下。为了方便,直接把代码和注释都写在一起,但运行时要注意的是:URDF文件里不要有中文注释:
<!--URDF文件的注释方法,即XML语法的注释,但不能使用中文注释-->
<!--但是这个urdf只能用于在rviz中展示机器人模型,要想在gazebo中显示,需要将urdf换成sdf格式。好在开发者提供了专门的转换命令,用户只需要在urdf文件中添加一些额外的标签,如:gazebo与rviz对应的link颜色设置代码不同,所以要对urdf中material块加入gazebo标签,这些标签放在</robot>之前就行-->
<?xml version='1.0'?>
<!--这里给整个完整的机器人进行命名,整个机器人就相当于C++中的类对象。机器人的零件link,零件间关系joint相当于类成员以及成员间关系-->
<robot name="dd_robot"><!--定义一个机器人对象,整个<robot>代码块对应一个机器人模型-->
<link name="base_link"><!--base_link是特殊的link,之后机器人所有包含的link都会基于这个base_link来定义-->
<visual><!--设置某个link的显示效果(即在rviz等软件中的显示效果),如它的坐标、几何属性(用什么几何形状表示)-->
<!--这里没声明visual name则默认base_link-->
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/><!--link的方向和坐标(link中心的坐标)属性(origin)-->
<geometry><!--link的几何属性-->
<box size="0.5 0.5 0.25" /><!--用一个box来表示该link,设置box的长宽高-->
</geometry>
<!--设置这个link的颜色,如果下一个visual没有设置其他颜色,则整个link都使用这个颜色-->
<!--一旦制定了某个名称的material,则这个名称的material可以复用,即在其他visual块中调用<material name="xxx"/>即可-->
<material name="blue">
<color rgba="0.0 0.5 1.0 1.0"/>
</material>
</visual>
<!--为每个可视化元件添加碰撞属性,以便让gazebo知道各个元件的具体边界位置
要将visual和collision属性分开写,它们一个是视觉属性,一个是碰撞属性-->
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<box size="0.5 0.5 0.25"/>
</geometry>
</collision>
<!--一般collision和visual块中的几何属性是一样的,因为一个物体外表要和它的形体相一致-->
<!--inertial块代表link的惯性、运动学特性,它是模型在gazebo中能够显示的重要元素。每有一个geometry就需要有一个inertial-->
<inertial>
<mass value="5"/><!--mass的值是某个link的重量,单位时千克-->
<inertia ixx="0.13" ixy="0.0" ixz="0.0" iyy="0.21" iyz="0.0" izz="0.13"/><!--inertia为3x3的转动惯量矩阵框架,
inertia要根据link实际使用的geometry内容而定,可以去网站上找到相关计算公式-->
</inertial>
<!--一个link块中可以添加多个visual块,相当于这个link由代码块中所有visual组成。同个link中的所有visual是个整体,它们的运动是一致的-->
<visual name="caster">
<origin xyz="0.2 0.0 -0.125" rpy="0.0 0.0 0.0"/>
<geometry>
<sphere radius="0.05"/>
</geometry>
</visual>
<collision>
<origin xyz="0.2 0.0 -0.125" rpy="0.0 0.0 0.0"/>
<geometry>
<sphere radius="0.05"/>
</geometry>
</collision>
</link>
<!--右边轮子的link,编写思路和上面的一样-->
<link name="right_wheel">
<visual>
<!--轮子的中心坐标可以设置为0,0,0,最终轮子的位置是会根据使用的joint确定-->
<origin xyz="0.0 -0.0 0.0" rpy="1.570795 0.0 0.0"/>
<geometry>
<cylinder length="0.1" radius="0.2"/>
</geometry>
<!--设置link的颜色-->
<material name="black">
<color rgba="0.05 0.05 0.05 1.0"/>
</material>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="1.570795 0.0 0.0"/>
<geometry>
<cylinder length="0.1" radius="0.2"/>
</geometry>
</collision>
</link>
<!--连接右边轮子和底座两个links的关节joint-->
<joint name="join_right_wheel" type="continuous"><!--设置joint名称和类型。这里使用连续类型的关节-->
<!--设置关节所连接的对象,一般一个关节连接两个对象:父子两个对象。对象名称就是之前定义的那些link的名称-->
<parent link="base_link"/><!--设置父对象-->
<child link="right_wheel"/><!--设置子对象-->
<!--下面设定的joint的中心是子对象与父对象间的相对位移。之前设定的子对象link的中心坐标也是在这个joint对应的相对位移的基础上确定好的-->
<origin xyz="0.0 -0.30 0.0" rpy="0.0 0.0 0.0"/><!--设置joint的方向之类的位置信息-->
<axis xyz="0.0 1.0 0.0"/><!--因为连续型关节能围绕一个轴旋转,所以这里要设置这个关节能绕哪个轴旋转-->
</joint>
<!--设置左边轮子,和右边轮子的思路一样-->
<link name="left_wheel"><!--左轮的一些物理属性可以和右边轮子一样-->
<visual>
<origin xyz="0.0 0.0 0.0" rpy="1.570795 0.0 0.0"/>
<geometry>
<cylinder length="0.1" radius="0.2"/>
</geometry>
<!--设置这个visual的颜色。由于之前定义了一个名为black的material,所以这里可以直接调用这个颜色-->
<material name="black"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="1.570795 0.0 0.0"/>
<geometry>
<cylinder length="0.1" radius="0.2"/>
</geometry>
</collision>
</link>
<!--连接右边轮子和底座两个links的关节joint,和之前思路一样-->
<joint name="join_left_wheel" type="continuous">
<parent link="base_link"/>
<child link="left_wheel"/>
<origin xyz="0.0 -0.3 0.0" rpy="0.0 0.0 0.0"/>
<axis xyz="0.0 1.0 0.0"/>
</joint>
<!--给urdf文件加入gazebo标签,主要是加入对urdf中material中颜色的gazebo标签-->
<gazebo reference="base_link"><!--指明这个标签时针对base_link对象的-->
<material>Gazebo/Blue</material><!--将指定对象的颜色属性转换成gazebo能够呈现的颜色,也就是所谓的gazebo标签。因为之前设置的URDF中的颜色代码在Gazebo中无法显示。这和Gazebo的显示颜色的机制有关-->
</gazebo>
<gazebo reference="right_wheel">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="left_wheel">
<material>Gazebo/Black</material>
</gazebo>
<!--其余的代码都可以直接转成sdf格式以供gazebo使用,不用添加标签-->
<!--这三个标签最好写在每个link结束后面。这里为了统一注释,所以写在了一起-->
</robot>
这串代码是使用 VSCode 写的,因为 VSCode 里面有个专门的 URDF 插件,可以帮你补全代码啥的,挺实用的。根据这个代码我们就构建了一个拥有三个轮子的小车。然后用下面的 launch 文件( launch 文件中可以写中文注释)打开rviz,将小车模型在rviz中显示。
<launch
<!--在通过命令行启动launch文件时要提供那些参数,也可以设置这些参数的默认值-->
<arg name="model" />
<arg name="gui" default="False" />
<!--这个launch将在ROS中的参数管理平台中发布这些可以查看、使用的参数-->
<!--robot_description是最重要的!!他应该是能够告诉 Rviz 应该读取显示哪个URDF文件-->
<param name="robot_description" textfile="$(find ros_robotics)/urdf/$(arg model)" />
<param name="use_gui" value="$(arg gui)"/><!--use_gui表示是否打开一个可以控制整个模型中所有joint的gui界面-->
<!--这个launch要启动3个node节点: joint_state_publisher, robot_state_publisher and rviz-->
<!--下面启动node的方法其实是系统自动在命令窗口中分别用rosrun命令启动各个node,以最后的node代码块为例,它对应的启动命令是:
rosrun pkg(rviz) node(rviz) args(各个参数) required(意义不太清楚) 代码块中的name有着其他含义-->
<!--这段node代码块的含义:
从pkg对应的功能包中,启动名称为type对应值的节点,并将启动的阶段在ROS平台中的名称设为name的对应值-->
<!--joint_state_publisher将urdf中的关节信息发布出去,从而帮助rviz等软件根据关节来显示各个link和机器人模型-->
<node name="joint_state_publisher"
pkg="joint_state_publisher"
type="joint_state_publisher" />
<!--robot_state_publisher会将机器人行动后的信息发布出去,帮助tf功能包确定机器人当前的状态,从何在模拟软件中显示-->
<node name="robot_state_publisher"
pkg="robot_state_publisher"
type="robot_state_publisher" />
<!--这段node块复杂一点:
一开始的代码和之前的意义一样,即启动rviz。之后设置rviz启动时的所有参数args,和required(意义不明)
urdf.rviz是rviz软件的可读文件,它保存了上一次rviz退出时的状态,之后启动rviz时,通过读取这个urdf.rviz可以恢复先前的状态,并配置好rviz的参数-->
<node name="rviz" pkg="rviz" type="rviz"
args="-d $(find ros_robotics)/urdf.rviz"
required="true" />
</launch>
直接用 roslaunch 命令执行该launch文件,显示效果:
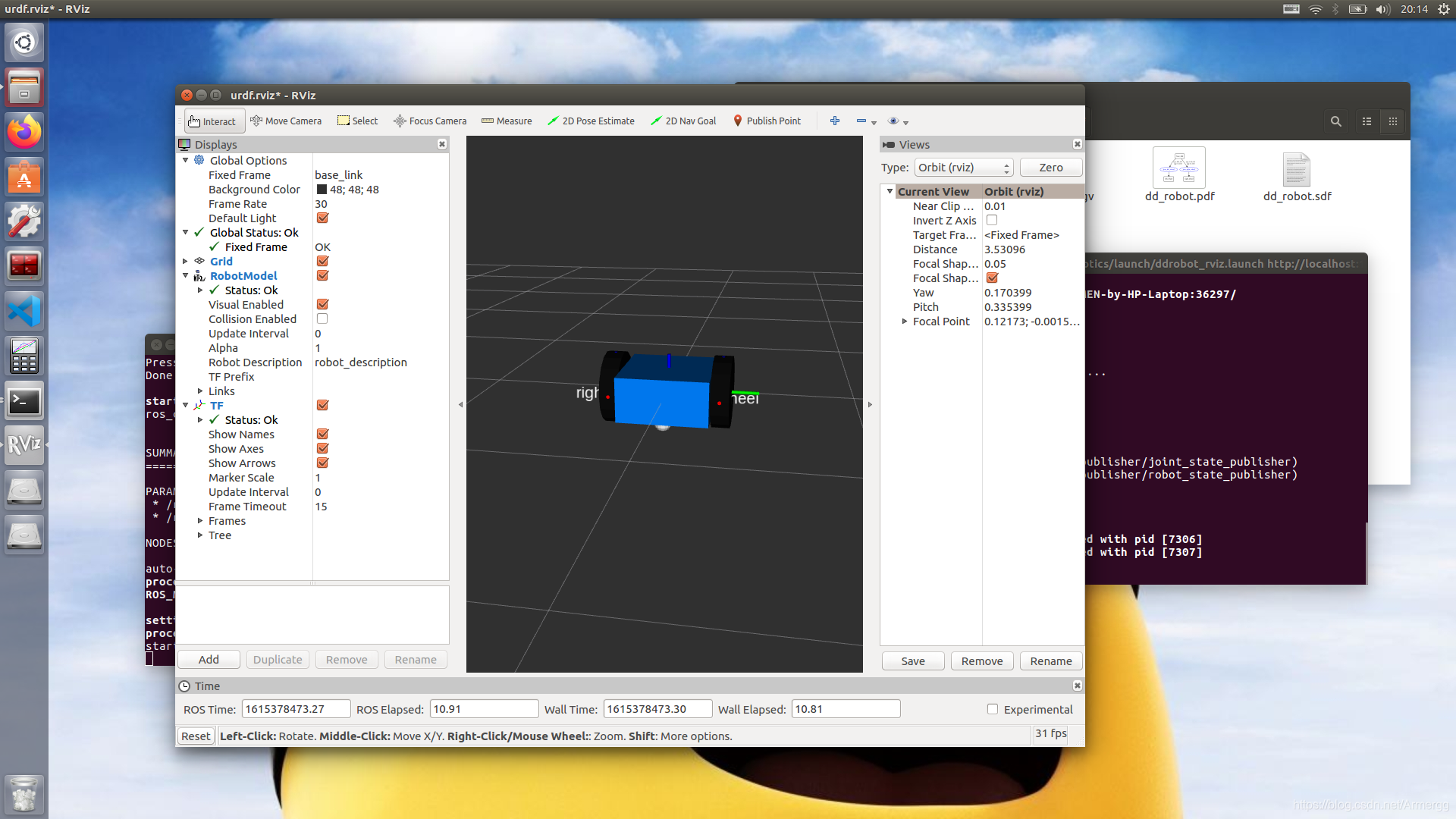
第一次执行可能要调一下Rviz,先点左边窗口的Add按钮,找到RobotModel和TF,然后将Fixed Frame设定为base_link即可。
其实也可以用Gazebo显示,只要稍微修改一下就行,这就看个人的习惯了。这个小车模型可以直接在 Gazebo 中用Model Edit 搭建。相比于写代码,图形化的搭建方式可能会更方便些。具体搭建方法大家可以参考这篇文章。
编写控制小车移动的插件(与ROS交互)
这个小车和常见的 turtlebot 不能说是一模一样,但也可以说是毫无关系。不过好在Gazebo中有很多现成的插件和模型,我们可以自行选择添加,编写小车代码只是为了帮助加深对 Gazebo 的理解。因为只是初步学习Gazebo仿真,所以我只做了控制小车移动的代码。为了方便直接把代码和注释写在一起:
#include <gazebo/gazebo.hh>//主要这个头文件,包含 Gazebo 中的大部分对象
#include <gazebo/physics/physics.hh>
#include <gazebo/transport/transport.hh>
#include <gazebo/msgs/msgs.hh>
#include <thread>
//ROS 要用到的所用到的头文件
#include <ros/ros.h>
#include <ros/callback_queue.h>
#include <ros/subscribe_options.h>
//ROS 的消息文件
#include <std_msgs/Float32.h>
//所有 Gazebo 插件都要在 Gazebo 的命名空间下创建。Gazebo 是之前头文件中已有的命名空间。
namespace gazebo
{
/// \brief A plugin to control car motion.
//可以把插件看作是C++中的类
class PositionPlugin : public ModelPlugin//定义插件的类名,该类继承 ModelPlugin
{
/// \brief Constructor 类对象构造函数,在gazebo中创建该插件时会执行一次
public: PositionPlugin()
{//一些测试代码,显示插件已经被构建了
std::cout<<"Motion Plugin"<<std::endl;
}
/// \brief 在该插件被加载进模型中时,gazebo会运行一次 Load 函数
/// \param[in] _model A pointer to the model that this plugin is attached to.
/// _model 指针参数会指向该插件所在的模型对象
/// \param[in] _sdf A pointer to the plugin's SDF element.
/// _sdf指针指向插件对应的sdf元素。这种一般是指向world文件中编写的插件的 SDF 代码。
public: void Load(physics::ModelPtr _model, sdf::ElementPtr _sdf)
{
std::cout<<"Starting Load"<<std::endl;
this->model = _model;
std::cerr << "\n The model's name is [" <<
_model->GetScopedName() << "]\n";
std::string car_name_ori="Hello";//不好意思,这里把名字取的太随意了,可以自行修改(T T)
// Initialize ros, if it has not already bee initialized.
if (!ros::isInitialized())
{
int argc = 0;
char **argv = NULL;
ros::init(argc, argv, car_name_ori + "_" + "node",
ros::init_options::NoSigintHandler);
}
// 根据之前定义的名字,创建ROS节点
this->rosNode.reset(new ros::NodeHandle(car_name_ori + "_" + "Handle"));
// 创建一个ROS中的topic
ros::SubscribeOptions so =
//create 函数创造使用相应信息数据类型的topic
ros::SubscribeOptions::create<std_msgs::Float32>(
"/" + this->model->GetName() + "/" + car_name_ori + "/pos_cmd",//topic的名称
1,//topic在通道内保存信息的数量个数
boost::bind(&PositionPlugin::OnRosMsg, this, _1),//该topic对应的回调函数
ros::VoidPtr(), &this->rosQueue);//该topic的数据队列是用户自定义的,所以要将自己创建的 CallbackQueue 对象传递过去(引用传递)
this->rosSub = this->rosNode->subscribe(so);
//看到这里朋友们可以发现,该话题的创建方式和 ROS 教程中不同。上述这种方式最主要的点在于用户要自行给定topic的队列控制函数,即rosQueue。用户要在函数中控制topic多久处理一次队列中的信息。
//将控制topic队列的函数放进新的线程中,这样才能使topic正常工作。
this->rosQueueThread =
std::thread(std::bind(&PositionPlugin::QueueThread, this));
//将设置模型速度的函数和仿真世界刷新函数绑定,这样才能有效改变模型速度(不断试错发现的)
this->updateConnection = event::Events::ConnectWorldUpdateBegin(
std::bind(&PositionPlugin::OnUpdate, this));
}
/// \brief Handle an incoming message from ROS上述topic对应的回调函数
/// \param[in] _msg A float value that is used to control the car
public: void OnRosMsg(const std_msgs::Float32ConstPtr &_msg)
{
//std::cout<<"I can hear you "<<std::endl;
this->vel=_msg->data;
sleep(1);//加入这个会让小车只运动一秒
this->vel=0;
}
public:void OnUpdate()
{
this->model->SetLinearVel(ignition::math::Vector3d(this->vel, 0, 0));//设置模型的线速度
//this->model->SetAngularVel(ignition::math::Vector3d(this->vel, 0, 0));//设置模型的角速度
//设置速度的函数要和仿真世界刷新函数共同执行,放在ROS回调函数中无效。
}
/// \brief ROS helper function that processes messages
private: void QueueThread()//这个函数是每多少timeout时间处理一次存储在topic通道中的信息。这个函数和之前的创建topic的代码要配套使用,否则topic会无法工作
{
static const double timeout = 0.01;
while (this->rosNode->ok())
{
this->rosQueue.callAvailable(ros::WallDuration(timeout));
//因为topic创建的方式比较特殊,故要设置数据队列处理数据的时间间隔!!!!!!
}
}
/// \brief Pointer to the model.
private: physics::ModelPtr model;
/// \brief A node use for ROS transport
private: std::unique_ptr<ros::NodeHandle> rosNode;
/// \brief A ROS subscriber
private: ros::Subscriber rosSub;
/// \brief A ROS callbackqueue that helps process messages
private: ros::CallbackQueue rosQueue;
/// \brief A thread the keeps running the rosQueue
private: std::thread rosQueueThread;
private: double vel;//速度变量
private: event::ConnectionPtr updateConnection;
};
// Tell Gazebo about this plugin, so that Gazebo can call Load on this plugin.
GZ_REGISTER_MODEL_PLUGIN(PositionPlugin)//这部分一定要有,这样才能让 gazebo 知道这是个插件
} // namespace gazebo
为了让 Gazebo 直接同时加载小车模型和编写的插件,这里推荐写一个 world 文件:
<?xml version="1.0" ?>
<sdf version="1.6">
<world name="motion_world">
<!-- 给world导入环境光模型 -->
<include>
<uri>model://sun</uri>
</include>
<!-- 地面 -->
<include>
<uri>model://ground_plane</uri>
</include>
<!-- A testing model -->
<model name='dd_robot'>
<include>
<uri>model://dd_robot</uri>
</include>
<!-- Attach the plugin to this model -->
<plugin name="motion_controller" filename="libmotion_controller.so">
</plugin>
</model>
</world>
</sdf>
然后用gazebo world文件命令运行这个文件。提一嘴,在执行命令前,我们要先把之前的小车 URDF 文件变成Gazebo 可用的SDF文件。方法很简单,直接执行这个命令即可gz sdf -p urdf文件 > sdf文件。我们还需要为这个 SDF 文件配套写一个 config 文件(介绍文件),内容如下:
<?xml version="1.0" encoding="UTF-8"?>
<model>
<name>dd_robot</name>
<version>1.0</version>
<sdf version="1.4">dd_robot.sdf</sdf>
<description>My Car.</description>
</model>
然后我们把转换好的 SDF 文件和 config 文件打包到一个叫 dd_robot 文件夹中,并将文件夹放进 ~/.gazebo/models/ 目录下。只有这样,在执行world文件时,Gazebo 才能找到你的模型文件,因为 Gazebo 是有默认模型搜索路径的(也可以修改GAZEBO_MODEL_PATH环境变量,不过我没试过)。然后先在一个命令窗口执行roscore,并在另一个窗口运行 world 文件。最后再在新的窗口向对应的topic发布命令:rostopic pub topicname 信息类型 信息,即左边窗口的操作:

图一、小车的原始位置。

图二、控制小车以0.2m/s的速度移动1s钟(这在代码中有写)
结尾
在调试的过程中发现Gazebo还是很好玩的,不过它的机制很复杂,还常常报些搞不懂的错(毕竟新手)。虽然Gazebo的模型库中就有很多已经构建好的模型,但尝试自己动手搭建未尝不是件很刺激的事(也是件烦躁的事)。好了,对Gazebo的初步学习到此结束,之后还有很长的路要走,比如给模型加入纹理啥的。
















 3778
3778











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









