







Winograd算法:
该算法在多个相关论文中都被采用了,这里详细记录一下算法原理。
1D卷积:
输入向量:
输入卷积核:
输出向量:
卷积步长为1,输入向量d长度为4,卷积核长度为3,则输出向量长度为2。
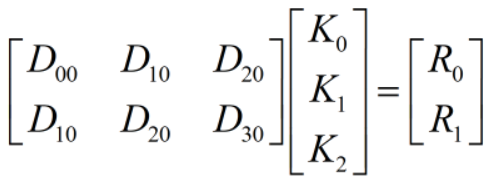
采用普通卷积方式的卷积计算方式如下:
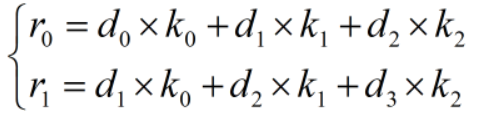
写成矩阵形式为:
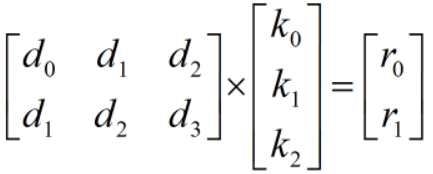
显而易见,普通卷积方式需要6次乘法和4次加法。
总结普通卷积的公式如下:
还没总结出来。。。。
1DWinograd算法:
这里只讨论使用方式,不讨论算法本身的推导。
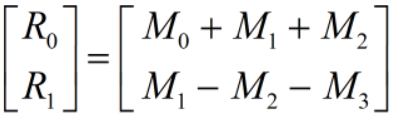
首先将r0和r1拆分如下:
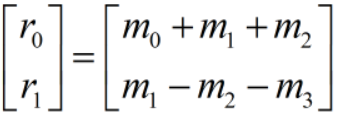
规定以下计算方式,使得最终结果与普通卷积相等:

由于在神经网络推理时,卷积核的值是固定的,所以可以通过预计算将涉及到k的乘法、加法、减法提前计算出来(实际操作中也可以做1/2也可以移位处理)。因此,通过这种拆分方式,计算出r0和r1只需要4次乘法和8次加减法。这样就非常有利于嵌入式平台的实现,这是因为在硬件中,加减法比乘法高效的多,且乘法器资源也是有限的,所以Winorad算法核心思想是用增加加减法次数的代价减少乘法的次数。
根据上述推导总结出1D Winograd卷积计算公式:

其中,G表示卷积核变换矩阵,表示输入变换矩阵,g为卷积核,d为输入向量,
为输出变换矩阵,
![]() 表示哈达玛积,即矩阵对应位置相乘。
表示哈达玛积,即矩阵对应位置相乘。

值得一提的是,虽然矩阵形式的卷积与Winograd算法等价,但是在矩阵形式中d是2个3维向量,Winograd算法中的d是4维向量。因此,从另一个角度来说,Winograd算法还有个好处是将输入向量从卷积的二维压到了一维,即可以将任意形如下式中输入排列的矩阵转换为一维输入。

其中g为[x,y,x],d为[A,B,C,D]。
在实际工程中,必须要考虑到,Winograd虽然减少了乘法次数,但是增加了计算方式转换以及内存的要求。
2DWinograd算法:
考虑到实际应用单通道图片是2D维度,因此需要将Winograd算法从1D扩展至2D。
设输入图片尺寸为4x4:

卷积核尺寸为3x3:
计算过程为:

将
那么对应输出矩阵的计算过程为:

仔细观察上述2D卷积过程,对输入矩阵和卷积核划分子矩阵,组织出1DWinograd结构:

即:
根据分块矩阵的性质,整体矩阵的相乘结果,与拆分成子矩阵后对应位置子矩阵的相乘结果一致(需要满足子矩阵的相乘是有意义的),那么就可以直接分块的子矩阵当成一般矩阵的元素处理,那么也就可以套用1DWinograd算法处理分块矩阵:

整理可得:

至此,推得二维Winograd公式。
参考:1.Winograd Convolution 推导 - 从1D到2D















 1751
1751











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









