






- 摘抄自https://zhuanlan.zhihu.com/p/80852438
- 摘抄自https://blog.csdn.net/weixin_51571728/article/details/124434728
一、概述
图像的几何变换主要包括:平移、缩放、旋转、仿射、透视等等。图像变换是建立在矩阵运算基础上的,通过矩阵运算可以很快的找到不同图像的对应关系。理解变换的原理需要理解变换的构造方法以及矩阵的运算方法。
图像的几何变换主要分为三类:刚性变换、仿射变换和透视变换,如下图:
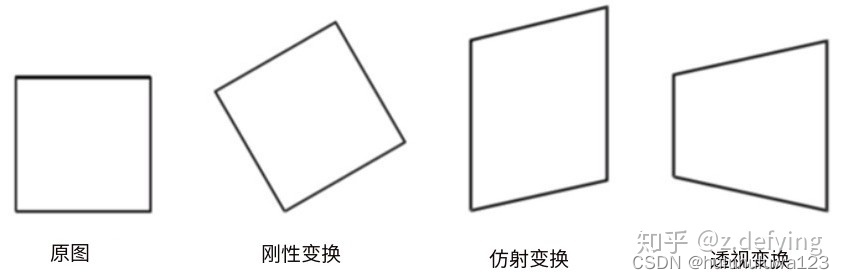 仿射变换是从一个二维坐标系变换到另一个二维坐标系,属于线性变换。通过已知3对坐标点可以求得变换矩阵。
仿射变换是从一个二维坐标系变换到另一个二维坐标系,属于线性变换。通过已知3对坐标点可以求得变换矩阵。
透视变换是从一个二维坐标系变换到一个三维坐标系,属于非线性变换。通过已知4对坐标点可以求得变换矩阵。
二、图像基本变换
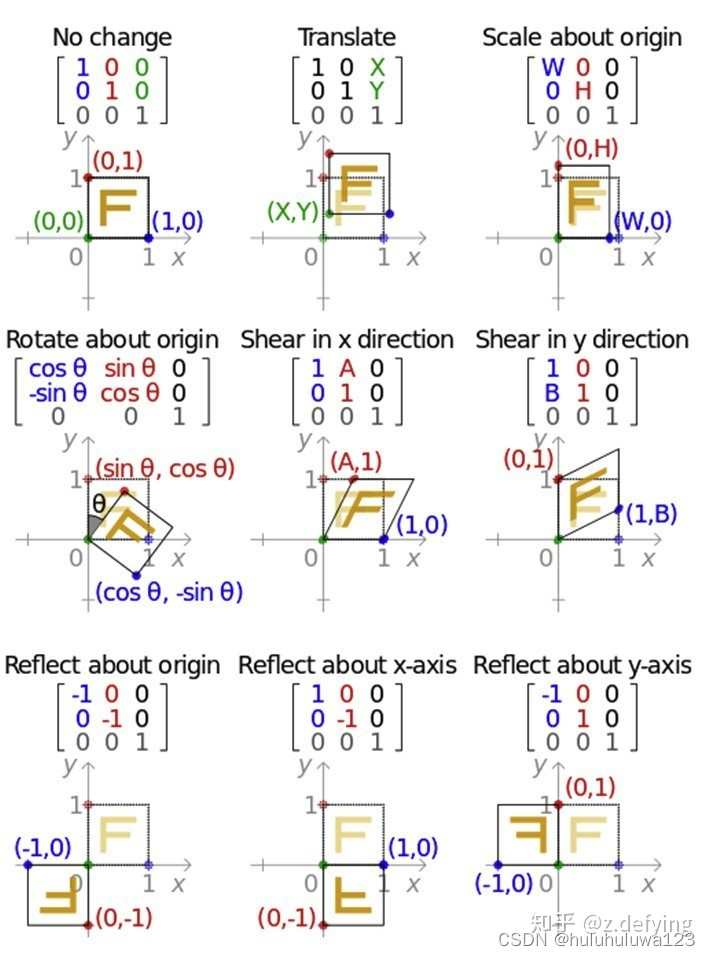
图像的几何变换包含很多变换,其中有一些基本变换,而仿射变换和透视变换就是对这些基本变换进行组合实现的。
基本变换具体包括:平移(Translation)、缩放(Scale)、旋转(Rotation)、翻转(Flip)和错切(Shear)。
a. 平移


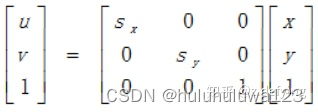
b. 缩放
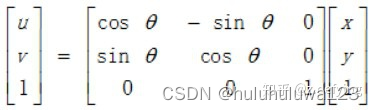
c. 旋转

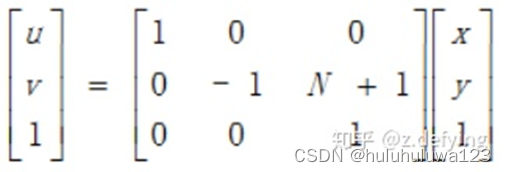
d. 翻转

e. 错切

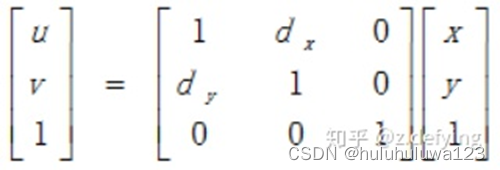
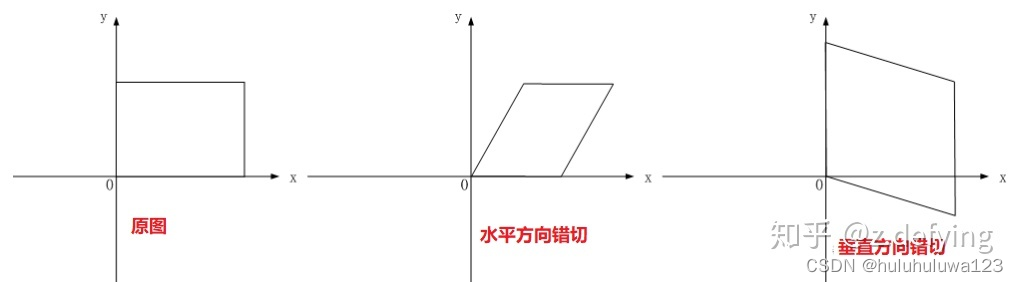
错切亦称为剪切或错位变换,包含水平错切和垂直错切,常用于产生弹性物体的变形处理。
二、利用opencv实现仿射变换
摘抄自https://blog.csdn.net/weixin_51571728/article/details/124434728
在OpenCV中仿射函数为cv2.warpAffine(),它通过一个变换矩阵(映射矩阵)M 实现变换,具体为:dst(𝑥, 𝑦) = src(𝑀11𝑥 + 𝑀12𝑦 + 𝑀13, 𝑀21𝑥 + 𝑀22𝑦 + 𝑀23)。如下图所示,通过一个变换矩阵M将原始图像O变换为仿射图像R。
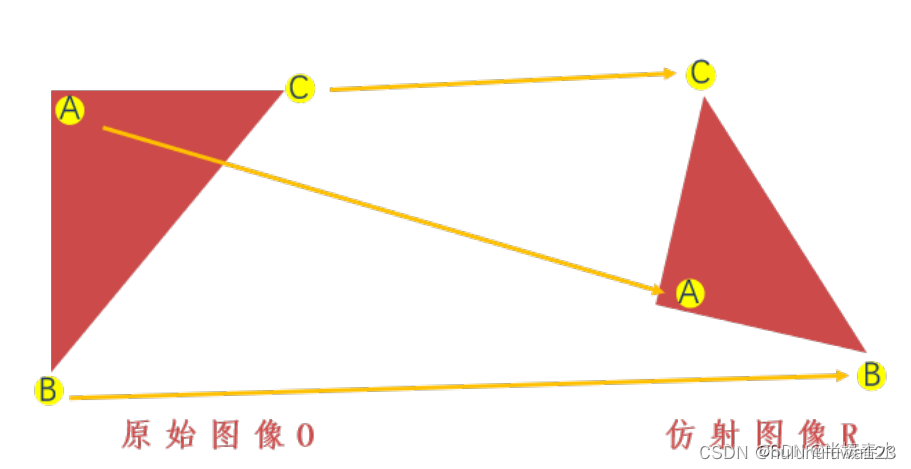
仿射图像R=变换矩阵M × 原始图像O
利用仿射函数cv2.warpAffine()可以实现对图像的平移、旋转、翻转等操作,其函数的语法格式如下:dst = cv2.warpAffine( src, M, dsize[, flags[, borderMode[, borderValue]]] )
参数解析:
dst :仿射变换后输出的图像,该图像的类型与原始图像的类型相同,由dsize 决定它的的实际大小。
src :要进行仿射变换的原始图像。
M :一个 2×3 的变换矩阵。使用不同的变换矩阵可以实现不同的仿射变换。
dsize:输出图像的尺寸大小。
flags :插值方法,默认为 INTER_LINEAR。当该值为 WARP_INVERSE_MAP 时,意味着 M 是逆变换类型,实现从目标图像 dst 到原始图像 src 的逆变换
概述中给出的旋转矩阵是3x3的。opencv中的变换矩阵M为2*3,数学计算中的变换矩阵需要在最后一行下增加[0,0,1]
- 平移的变换矩阵
M = np.float32([[1, 0, x], [0, 1, y]]) #转换矩阵M - 以图像中心为圆点,逆时针旋转 60°,并将目标图像缩小为原始图像的 0.7 倍
M = cv2.getRotationMatrix2D((width/2, height/2), 60, 0.7) #生成转换矩阵M - 根据3个点的坐标,及其变换后的坐标,获取变换矩阵
p1=np.float32([[0,0],[cols-1,0],[0,rows-1]])
p2=np.float32([[0,rows*0.33],[cols*0.85,rows*0.25],[cols*0.15,rows*0.7]])
M=cv2.getAffineTransform(p1,p2) #转换矩阵 M
- 透视
仿射变换可以将矩形映射为任意平行四边形,而透视变换可以将矩形映射为任意四边形。通过函数cv2.warpPerspective()可以实现透视变换,其语法为dst = cv2.warpPerspective( src, M, dsize[, flags[, borderMode[, borderValue]]] )
参数解析:
dst :透视处理后的输出图像,与原始图像具有相同的类型。dsize 决定输出图像的实际大小。
src:要进行透视变换的图像。
M :一个 3×3 的变换矩阵。
dsize :输出图像的尺寸大小。
flags :插值方法,默认为 INTER_LINEAR。当该值为WARP_INVERSE_MAP 时,意味着 M 是逆变换类型,能实现从目标图像 dst 到原始图像 src 的逆变换
透视变换需要知道4个点的左边及其变换后的坐标
pts1 = np.float32([[150,50],[400,50],[60,450],[310,450]])
pts2 = np.float32([[50,50],[rows-50,50],[50,cols-50],[rows-50,cols-50]])
M=cv2.getPerspectiveTransform(pts1,pts2) #转换矩阵M














 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









