







 本文详细介绍了比例积分(PI)控制器在油门位置控制中的应用,阐述了离散系统的概念,包括离散状态的更新和记忆功能。通过差分方程和状态空间模型展示了如何建立离散PI控制器的模型,并探讨了多速率离散系统的采样时间与执行顺序。同时,提到了使用单位延迟模块和离散时间积分模块来实现差分方程的方法,并在同一个示波器中比较了两种方法的输入和输出。最后,讨论了不同求解器模式下的速率转换对系统性能的影响。
本文详细介绍了比例积分(PI)控制器在油门位置控制中的应用,阐述了离散系统的概念,包括离散状态的更新和记忆功能。通过差分方程和状态空间模型展示了如何建立离散PI控制器的模型,并探讨了多速率离散系统的采样时间与执行顺序。同时,提到了使用单位延迟模块和离散时间积分模块来实现差分方程的方法,并在同一个示波器中比较了两种方法的输入和输出。最后,讨论了不同求解器模式下的速率转换对系统性能的影响。
概览
PI控制系统介绍
离散状态介绍
PI控制器建模
离散传递函数和状态空间系统建模
多速率离散系统建模
系统介绍
比例积分控制器( PI)是油门板位置控制器, 它主要功能是接收传感器所传递的油门位置信息和油门位置控制命令,然后确定所需要的电机控制电压和相应的脉冲占空比、周期及方向,用以产生所需控制电压。
离散系统特征介绍
离散状态在每个特定的时间间隔内(采样时间)更新一次.
系统输出取决于记忆元件 (主要指离散状态)、系统输入和时间.
离散状态具有记忆动态特性变化的功能
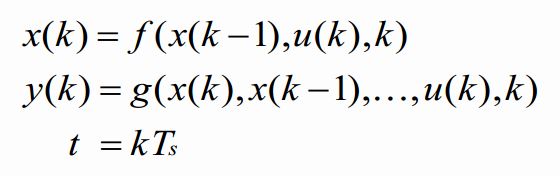
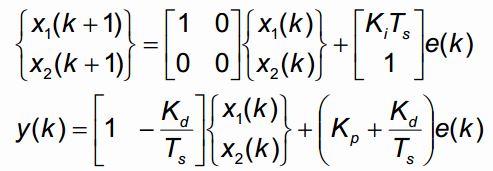
离散系统状态方程的数学表达如下所示
差分方程建模
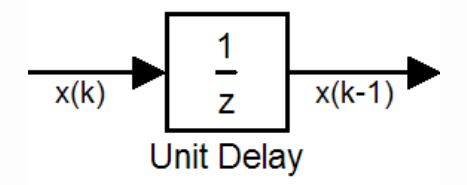
单位延迟模块是不同状态方程的基本构建模块
它保持并延迟其输入一个采样时间.
它需要一个采样时间和初始化条件.
零阶保持器对一个信号进行离散化并采样:
在一个采样时间间隔内保持器输入不变.
它需要一个采样时间。
决定所需要的单位延迟模块的个数 (每个状态变量需要一个延迟模块 ):
例如, x(k) = x(k-1) + u(k) – u(k-1)需要两个延迟模块: x(k) = x(k-1); u(k) = u(k-1)
以单位延迟模块开始,为输入输出信号提供合适的单位坐标.为差分方程的右端建模.
如果需要的话,把右端模型作为左端模型的信号源连接起来.设定采样时间和初始化条件.
用方程为系统建模
一个离散的PI控制器作为油门位置控制器,其依据方程如下:
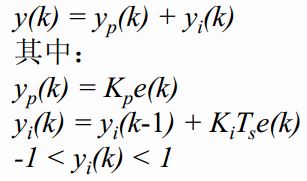
e(k) — 误差 (预期输出 — 实际输出)
Ts — 采样时间
Kp — 比例增益
Ki — 积分增益
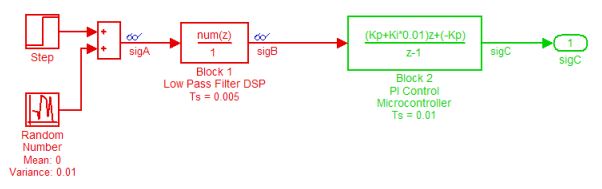
创建系统方框图模型
使用一个阶跃信号作为系统的输入
用两种方法建立差分方程. 且同一个模型中实现:
用延迟模块
用离散时间积分模块——采用反向积分法
在同一个示波器中查看两种方法实现的输入和输出
使用不同的名字定义模块参数。
创建离散状态空间/传递函数模型

离散状态空间实现
状态空间实现:
系统的一种时域表达方式.
将二阶或高解差分方程转换为一系列一阶差分方程
通常一个具有n个状态, p个输入, m 个输出的离散系统
的状态空间描述为:
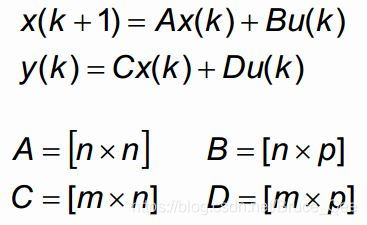
离散状态空间
速率转换的理解
三种模式
• 变步长求解器 (仅仅仿真)
• 固定步长求解器 – 单任务 (仿真和执行)
• 固定步长求解器 – 多任务 (仿真和执行)
定步长求解器选项
多速率单任务模式:
以单任务的形式分组,模块的执行顺序按照系统初始执行顺序的。
只有在执行的任务结束之后,新任务才能开始。
多速率多任务模式:
采样速率一样的执行模块被分组为一个任务。
任务的优先级是按照其采样速率排序的 (速率快的认为具有更高的优先级).
速率更快的任务可以中途打断速率慢的任务。
速率转换必须要保证数据的完整性和确定性。

















 936
936

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









