






carsim与simulimk联合仿真
LKA,车道保持
横向控制,轨迹跟随,车道保持:
基于pid的轨迹跟随联合仿真模型
基于单点预瞄的轨迹跟随联合仿真模型
基于多点预瞄的轨迹跟随联合仿真模型
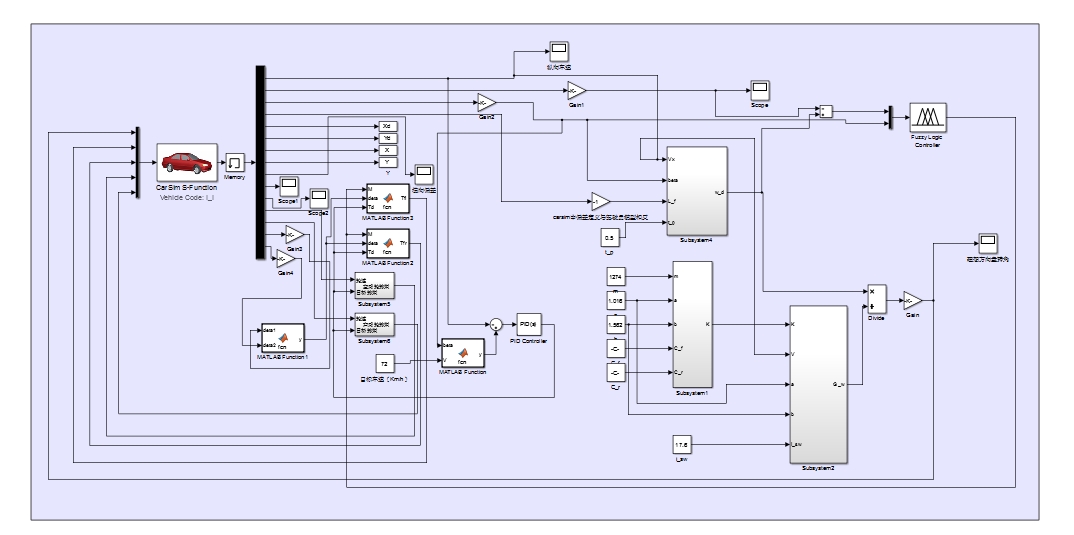
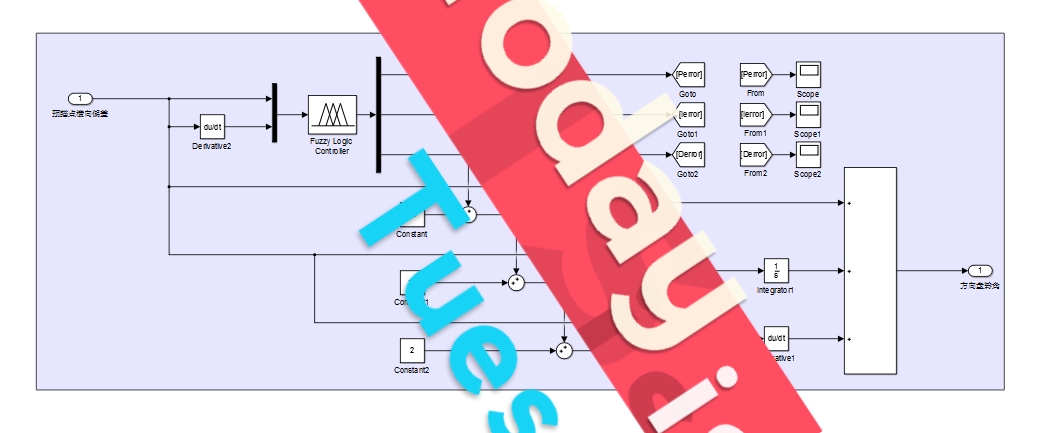
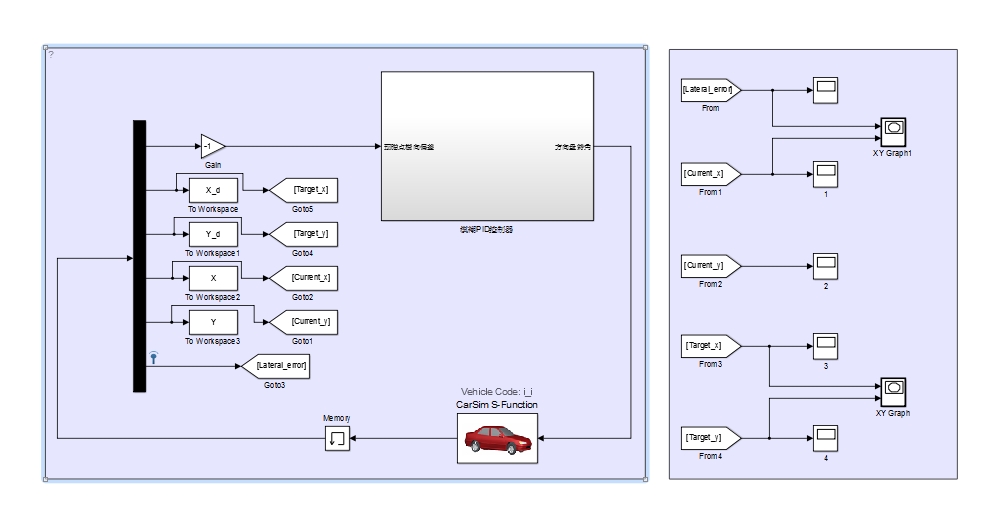
基于模糊PID的轨迹跟随联合仿真模型
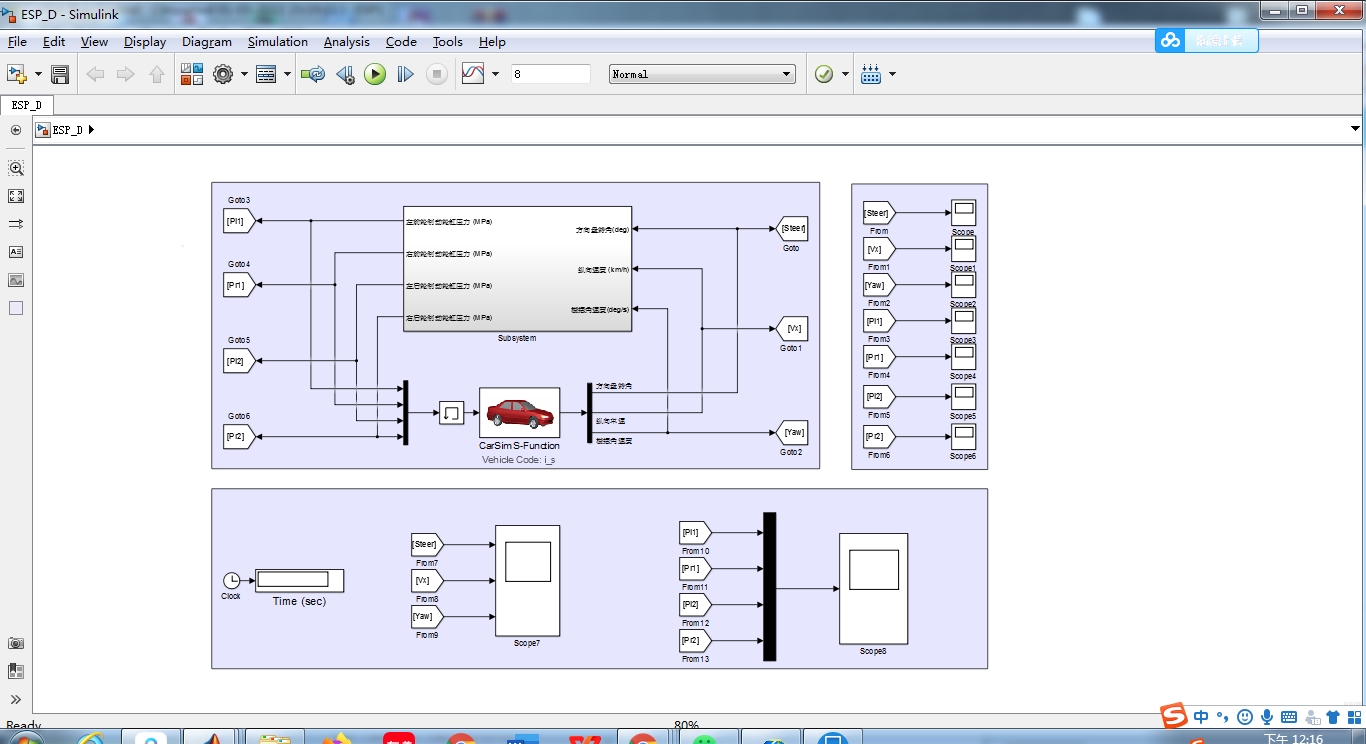
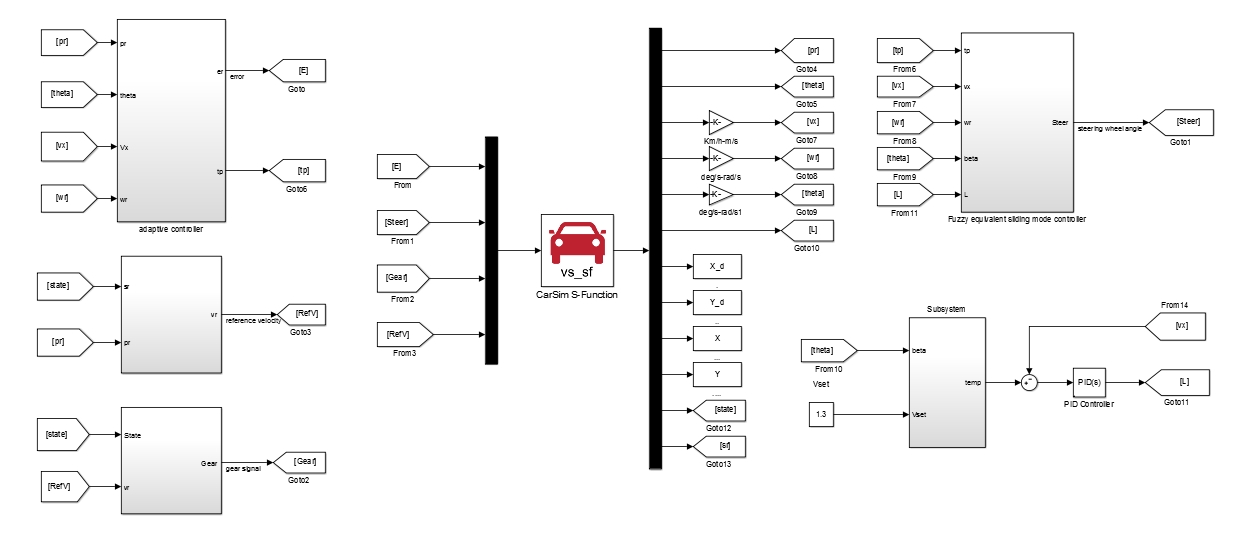
基于预瞄跟随+滑模变结构控制的轨迹跟随联合仿真模型
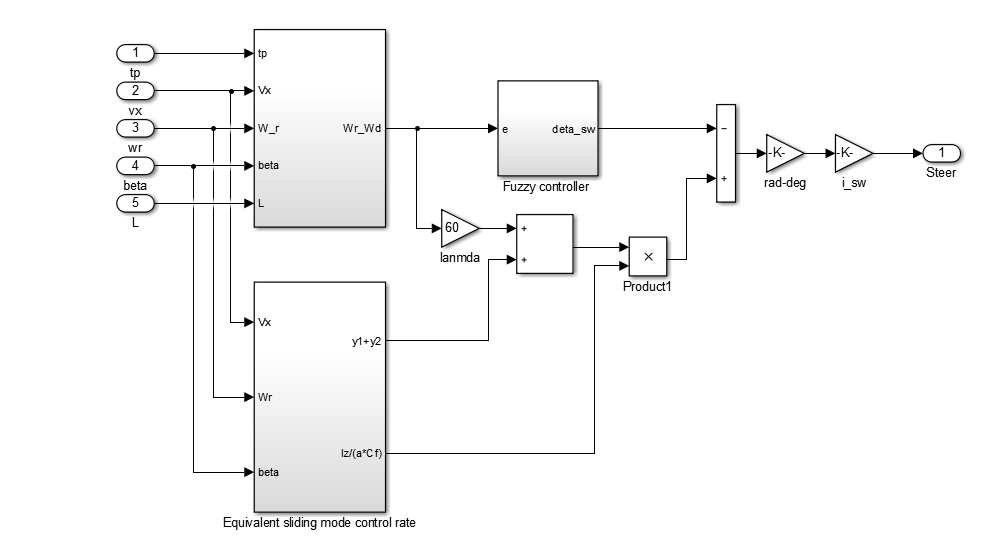
基于预瞄+滑模变结构+模糊控制+预瞄距离自适应的轨迹跟随联合仿真模型
基于MPC的极限工况与非极限工况下的联合仿真模型
ACC联合仿真模型(含超详细报告)
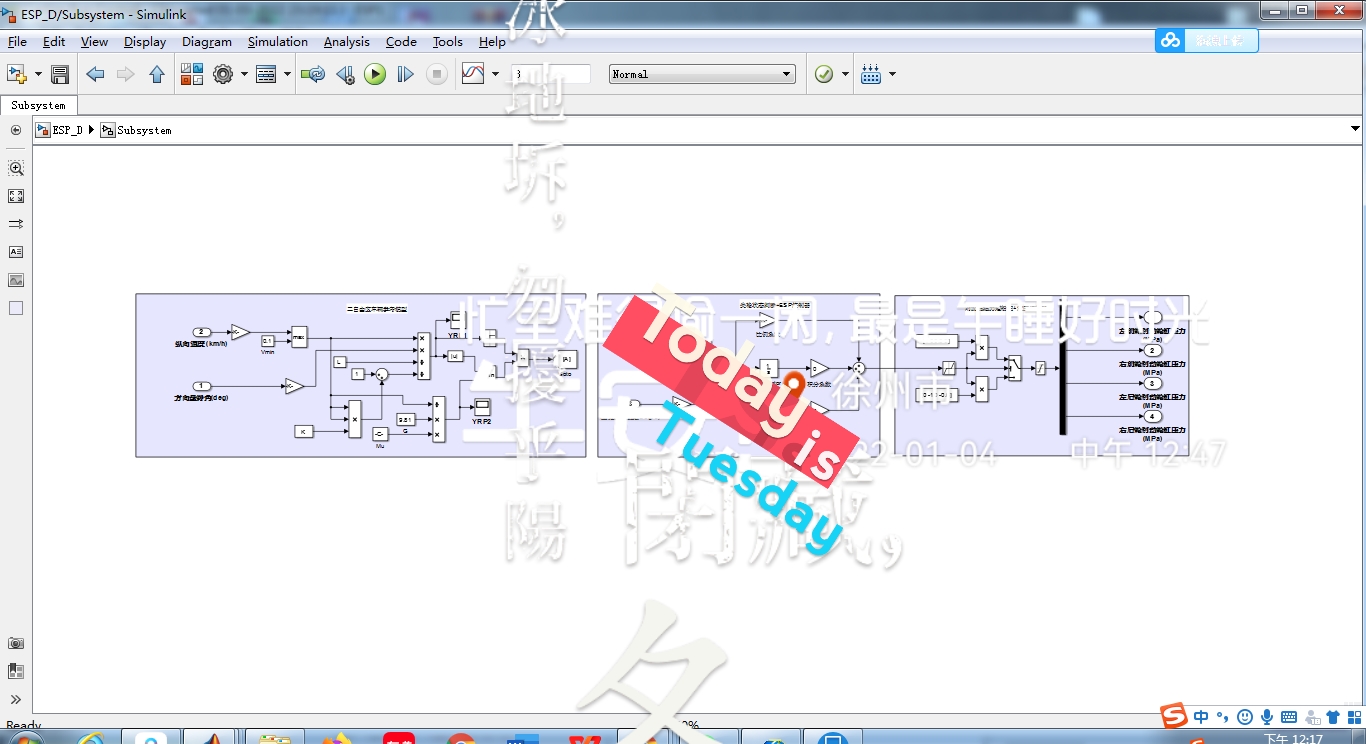
差动驱动联合仿真模型
AEB 联合仿真模型(含报告)
ID:4915658587066119
多不多啦米
车辆行驶安全是现代交通系统中的一个重要问题,以车道保持为例,它在自动驾驶技术中起着至关重要的作用。车辆在行驶过程中,通过感知周围的环境、识别道路标志和车道线等,实现对车辆的横向控制,以保持在所在车道内行驶。
在车辆横向控制中,轨迹跟随是一个关键的技术。轨迹跟随的目标是使车辆紧跟所选定的轨迹行驶,以实现车辆的车道保持功能。在这个过程中,车辆需要根据不同的控制算法和模型,对车辆的横向控制进行精确的调节。
基于PID的轨迹跟随联合仿真模型是一种常见的轨迹跟随算法。PID(比例-积分-微分)控制器是一种经典的控制器,通过不断地调节车辆的转向角度,使车辆跟踪所选定的轨迹。然而,PID算法在某些情况下可能表现不佳,因此需要进一步优化。
基于单点预瞄的轨迹跟随联合仿真模型是一种通过预瞄车辆前方轨迹点的方法,来进行轨迹跟随的算法。通过预先确定车辆所要行驶的轨迹点,然后根据车辆当前位置和预瞄点的位置,计算出车辆需要调整的转向角度。这种方法可以更加准确地预测车辆的行驶轨迹,从而提高轨迹跟随的效果。
基于多点预瞄的轨迹跟随联合仿真模型是在单点预瞄的基础上进行的改进。通过预瞄多个车辆前方的轨迹点,可以更加准确地预测车辆的行驶轨迹。这种方法可以在一定程度上提高车辆的轨迹跟随性能,并且在复杂的道路环境下表现更好。
基于模糊PID的轨迹跟随联合仿真模型是在PID控制器的基础上引入模糊控制的方法。模糊控制是一种基于模糊推理的控制方法,通过模糊化输入和输出,使用模糊规则对车辆的转向角度进行调节。这种方法可以适应不同的道路条件和车辆状态,提高车辆的轨迹跟随性能。
基于预瞄跟随+滑模变结构控制的轨迹跟随联合仿真模型是在预瞄跟随和滑模变结构控制的基础上进行的改进。预瞄跟随方法可以提高车辆的轨迹跟随性能,而滑模变结构控制可以保证车辆在不确定因素的影响下仍能保持稳定。这种方法综合了两种控制算法的优势,能够在多种道路条件下有效地实现车辆的轨迹跟随功能。
基于预瞄+滑模变结构+模糊控制+预瞄距离自适应的轨迹跟随联合仿真模型是在前面几种方法的基础上进一步进行的改进。这种方法结合了预瞄控制、滑模变结构控制和模糊控制等多种控制方法,通过自适应调节预瞄距离,可以更好地适应不同的道路条件和车辆状态,提高车辆的轨迹跟随性能。
基于MPC的极限工况与非极限工况下的联合仿真模型是一种基于模型预测控制(MPC)的轨迹跟随算法。MPC算法是一种基于优化的控制方法,通过预测车辆的未来行驶轨迹,以优化的方式调节车辆的转向角度,实现车辆的轨迹跟随功能。这种方法可以在不同的工况下保持车辆的稳定性,并且能够适应极限工况下的车辆行驶。
ACC联合仿真模型是一种基于自适应巡航控制(ACC)的轨迹跟随算法。ACC算法是一种通过感知前方车辆的行驶状态和距离,以自适应的方式调整车辆的速度,保持与前方车辆的安全距离。这种方法可以实现车辆的自动跟车功能,并且能够在不同的交通条件下保持车辆的稳定性。
差动驱动是一种特殊的驱动方式,通过分别控制车辆左右两侧的驱动轮,可以实现更加精确的横向控制。差动驱动联合仿真模型是一种基于差动驱动的轨迹跟随算法,通过调节左右两侧的驱动力矩,实现车辆的横向控制和轨迹跟随功能。这种方法适用于差动驱动的车辆,可以提高车辆的操控性能。
AEB联合仿真模型是一种基于自动紧急制动(AEB)系统的轨迹跟随算法。AEB系统通过感知前方障碍物的距离和速度,以自动的方式控制车辆的制动力度,以避免与前方障碍物的碰撞。这种方法可以实现车辆的自动制动功能,并且能够在紧急情况下保持车辆的稳定性。
综上所述,车辆轨迹跟随是实现车道保持的关键技术之一。在车辆横向控制中,不同的控制算法和模型可以应用于不同的驾驶场景和车辆类型。通过联合仿真模型的研究和开发,可以进一步提高车辆的轨迹跟随性能,并且实现更加精确的车道保持功能。基于不同的控制算法和模型的联合仿真模型,可以为车辆的轨迹跟随提供多样化的解决方案,适用于不同的驾驶场景和车辆需求。随着自动驾驶技术的发展,车辆轨迹跟随的研究和应用将在未来的交通系统中发挥越来越重要的作用。
相关的代码,程序地址如下:http://coupd.cn/658587066119.html
















 512
512

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









