






点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心技术交流群
后台回复【3D检测综述】获取最新基于点云/BEV/图像的3D检测综述!
论文:https://arxiv.org/pdf/2209.15252v1.pdf
代码:https://github.com/vision-agh/pointpillars_backbone
作者单位:AGH University of Science and Technology
论文思路
在自动驾驶汽车和无人机的背景下,从激光雷达传感器数据进行3D目标检测是一个重要的主题。本文介绍了深度卷积神经网络主干选择对检测精度和计算速度的影响的实验结果。本文选择了pointpills网络,其特点是结构简单,速度快,模块化,易于扩展。在实验过程中,本文特别注意了检测效率的变化 (通过mAP度量来测量) 以及处理一个点云所需的乘法加法操作的总数。本文测试了10种不同的卷积神经网络架构,这些架构广泛用于基于图像的检测问题。对于像MobilenetV1这样的主干,本文以mAP的1.13% 降低为代价获得了几乎4倍的加速。另一方面,对于CSPDarknet,本文以0.33%mAP的增加,并取得了超过1.5倍的加速。因此,本文已经证明,可以在激光雷达点云中显着加快3D目标检测器的速度,而检测效率的降低很小。当在嵌入式系统 (包括SoC fpga) 中实现pointpills或类似算法时,可以使用此结果。
主要贡献:
从检测性能和速度方面回顾了10种不同版本的PointPillars。
识别pointpills网络的几个版本,这些版本比原始版本快得多,而检测性能的下降却很小。
论文设计
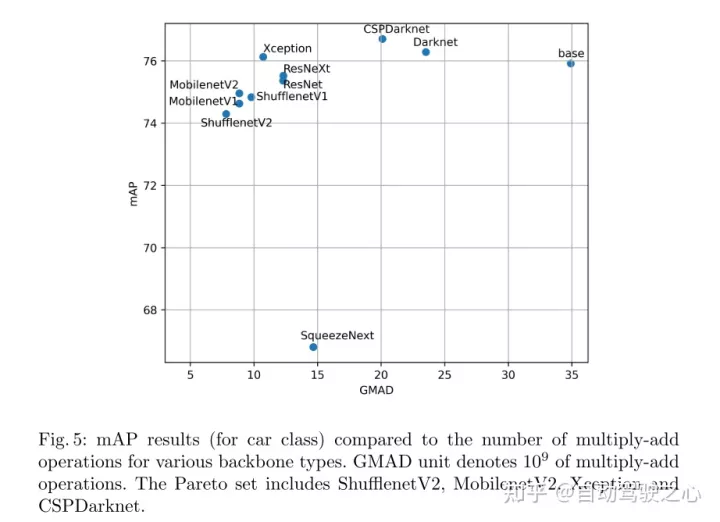
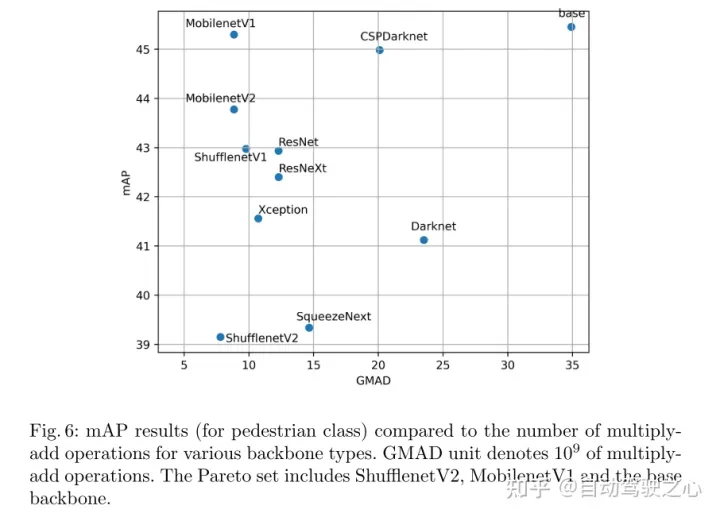
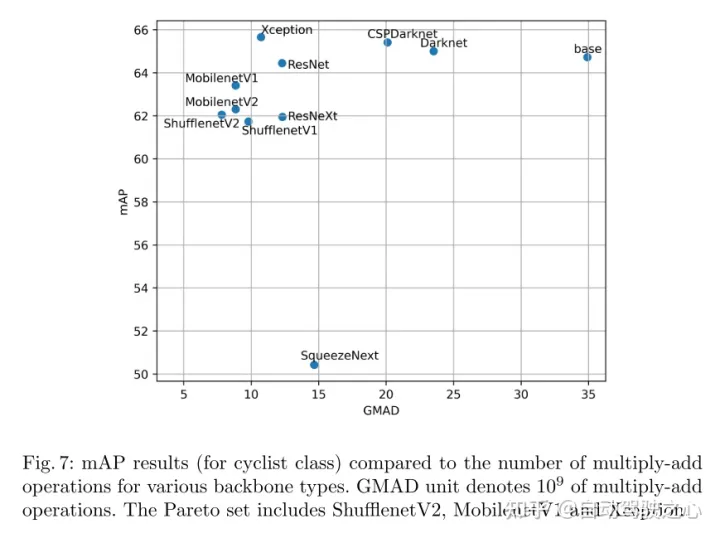
本文研究了用较轻量的计算体系结构替换pointpills主干对检测性能的影响。本文考虑了10种不同的主干,这些主干受到用于图像中目标检测的快速轻巧算法的启发。特别是,本文正在寻找能够显着减少乘法运算总数,同时检测性能降低最少的解决方案。
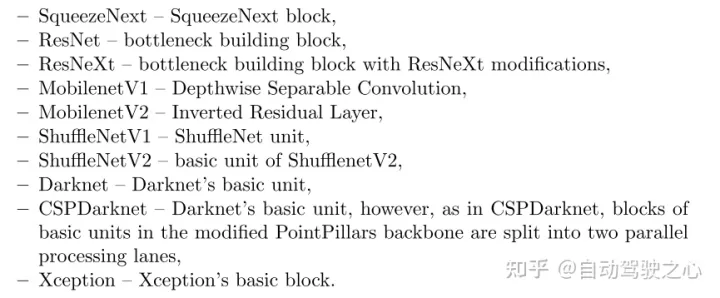
论文中选用的主干网络
实验结果
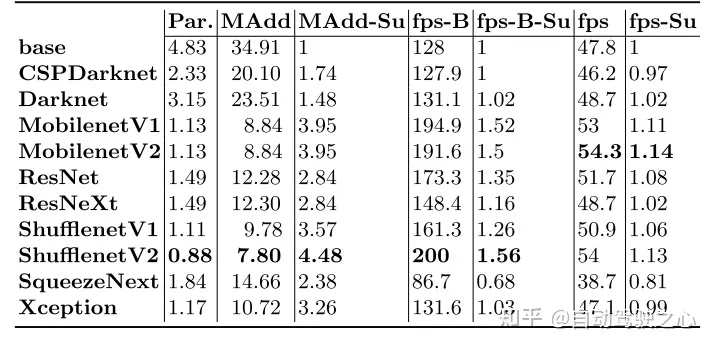
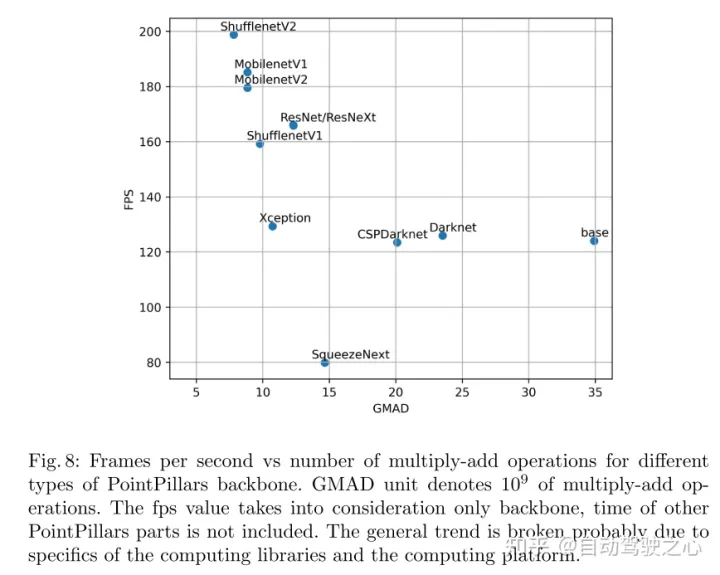
骨干表征。Par.表示参数数量 (单位: 106参数)。MAdd表示乘法-加法运算的数目 (单位: 109运算)。Fps-b表示仅针对主干测量的每秒帧数。fps表示整个算法的处理速率。MAdd-Su,fps-b-su和fps-su表示按乘法运算的数量,骨干fps和整个算法处理速率来加速。所有加速值都是相对于基本骨干版本计算的。fps和fpsB值使用Nvidia RTX 2070S GPU (使用mmdetection3d环境) 测量。参数的数量比原始点柱小1.5x-5.5倍。Fps-b和MAdd值之间没有严格的相关性。有趣的是,以fps-b和fps衡量的加速比以乘法运算的数量衡量的加速比要小得多。
往期回顾
【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、多传感器融合、SLAM、光流估计、轨迹预测、高精地图、规划控制、AI模型部署落地等方向;
加入我们:自动驾驶之心技术交流群汇总!
自动驾驶之心【知识星球】
想要了解更多自动驾驶感知(分类、检测、分割、关键点、车道线、3D目标检测、多传感器融合、目标跟踪、光流估计、轨迹预测)、自动驾驶定位建图(SLAM、高精地图)、自动驾驶规划控制、领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球(三天内无条件退款),日常分享论文+代码,这里汇聚行业和学术界大佬,前沿技术方向尽在掌握中,期待交流!
















 1532
1532

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









