






经常听到同事抱怨实车上标定参数又出问题了,跑出来的结果可视化对不上,又浪费了半天时间。尤其是涉及多个传感器,标定更加是个高难度技术活,无论是机器人厂、主机厂还是Tier1、Tier2等,都对标定非常重视,标定效果将会直接影响下游感知、定位融合的应用!
传感器是自动驾驶系统能够感知周围环境的决定性因素,它们是自动驾驶系统能够准确定位的前提。装车后,需要进行传感器标定来消除安装误差,从而确保传感器数据准确无误。正确的传感器标定对于自动驾驶系统运行是至关重要的,它既可以为后续的建图、定位、感知和控制打下坚实的基础,也可以影响车辆的行驶状态。此外,传感器标定的精度也直接影响传感器的使用上限精度,因此,正确的传感器标定是自动驾驶系统稳定运行的关键所在。传感器标定是自动驾驶的基本需求,在自动驾驶和机器人系统中有着丰富的实际应用,最近越来越多标定的相关论文出现在顶会和期刊中,对于学术研究也是一个非常热的方向。
然而,目前还没有一个系统讲解多传感器标定的课程,许多小伙伴不知道怎么提升标定精度?多传感器之间的位姿解算也一头雾水。我们和多家自动驾驶公司的多传感器标定算法人员进行了沟通,认真打造了一个系统的课程学习计划,并由行业专家领衔讲解,将从多个方面给大家系统性的讲解不同场景下的标定算法:
多传感器手动&自动标定算法: 可以用于个人研究者&自动驾驶公司
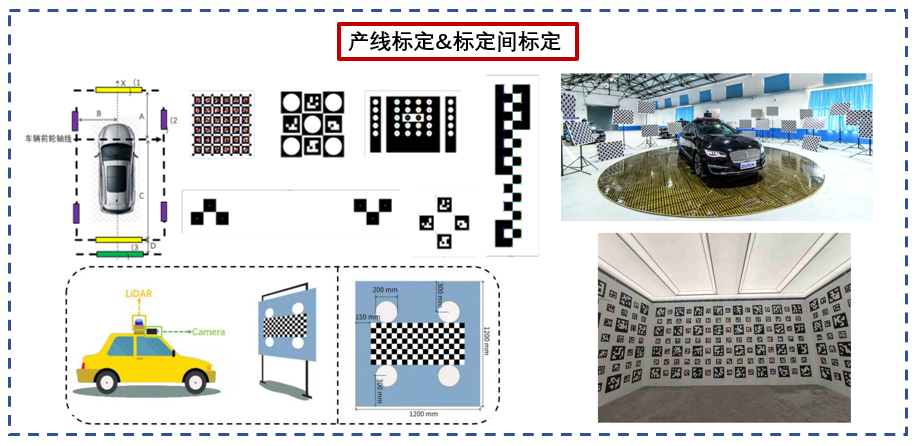
 产线标定&标定间标定: 可以用于车企进行量产标定
产线标定&标定间标定: 可以用于车企进行量产标定
多传感器在线标定: 每隔一定的时间用户可以进行传感器在线标定

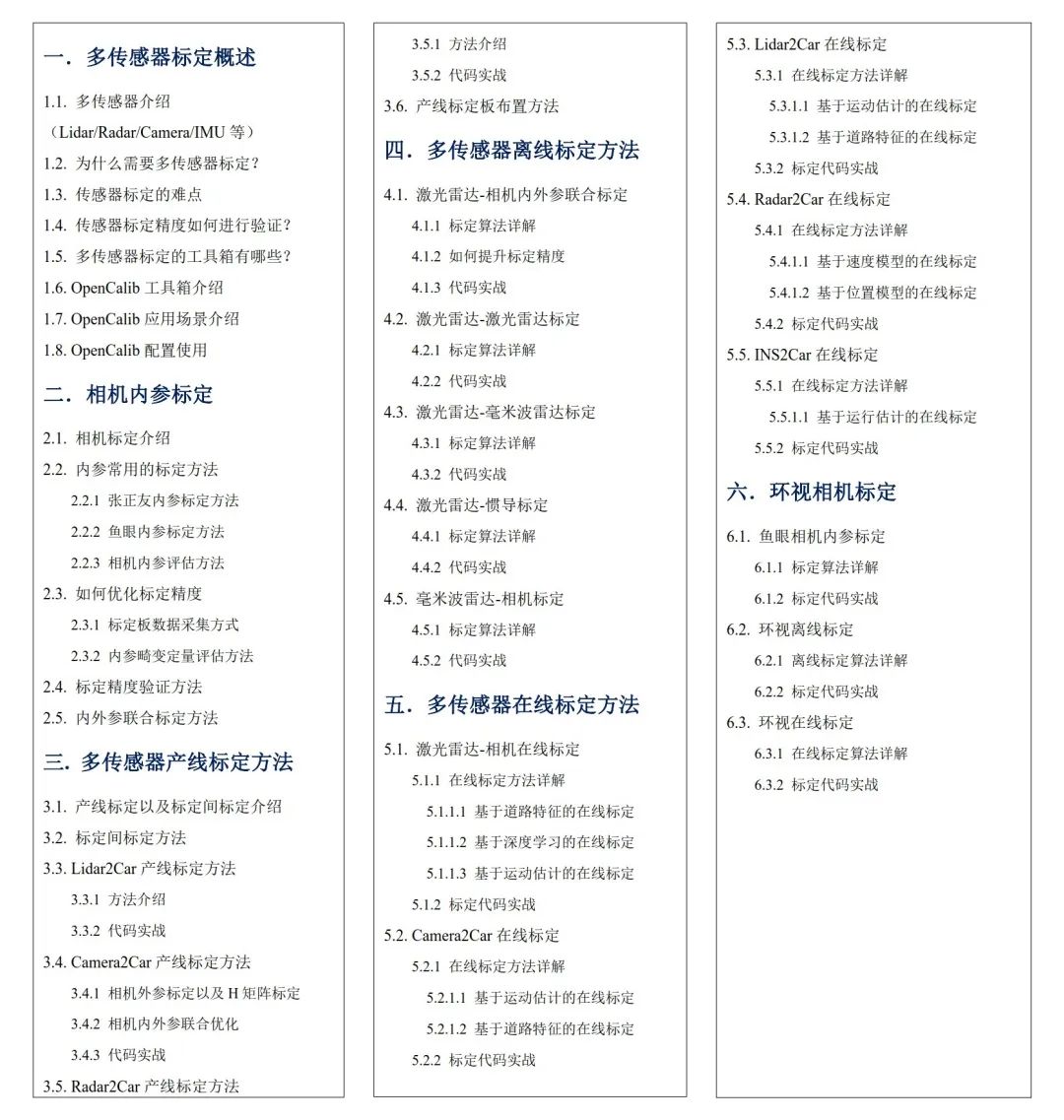
课程大纲
针对工业界和学术界对多传感器标定所需的技能和实战要求,我们制定了深入浅出的理论+非常丰富的实战类课程大纲,针对相机内参标定、标定精度优化、传感器到车体标定、多传感器之间离线标定/在线标定、鱼眼与环视相机标定等20+标定方案展开了算法讲解与代码实现,适合感知、标定等算法工程人员从0到1的学习,让大家循序渐进,学完课程后能够掌握不同传感器的标定方法及优化策略。
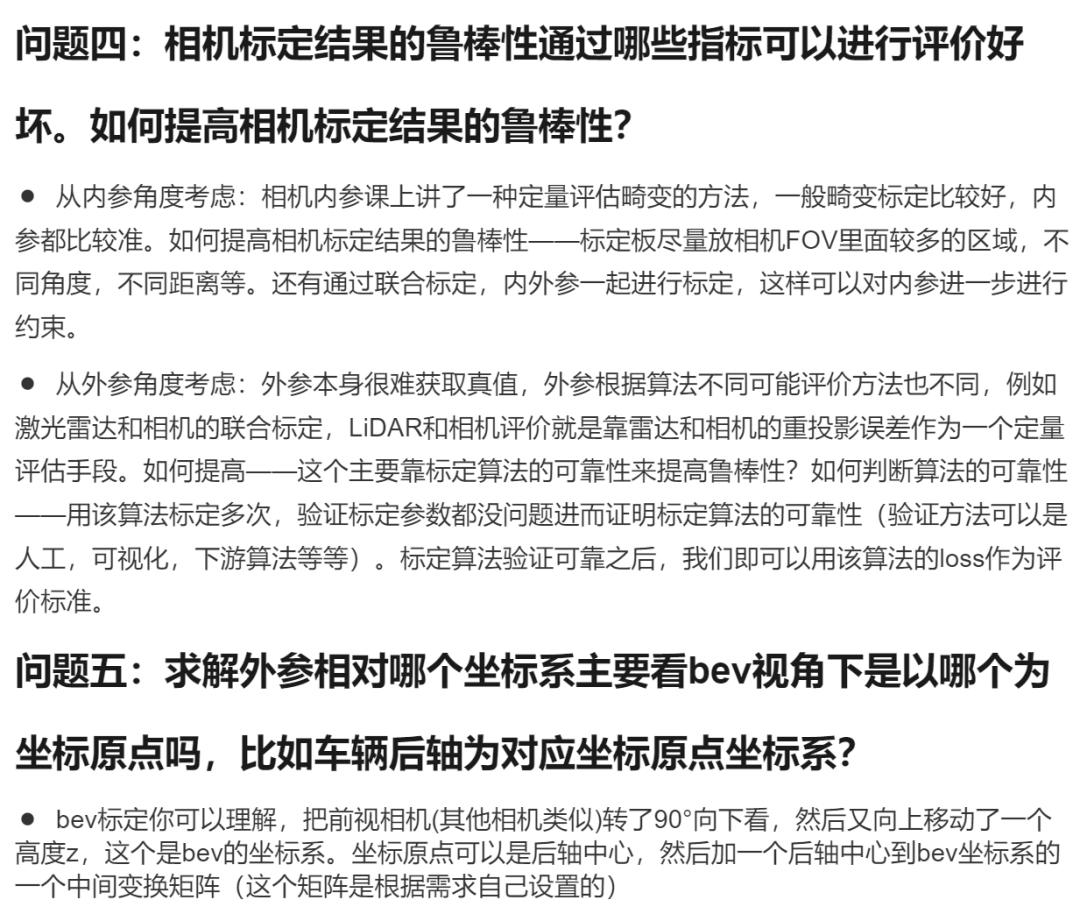
答疑手册每日更新!

主讲老师
路飞,自动驾驶之心前沿技术研究团队成员,曾在头部自动驾驶公司工作多年,有多年的自动驾驶算法研发和项目交付经验。在IROS,ICRA,RA-L,SIGGRAPH,TVCG等机器人、计算机图形学领域发表多篇论文,在自动驾驶传感器标定、SLAM、模型优化方面有着丰富的研究和项目交付经验。
本课程适合人群
自动驾驶多传感器感知、标定相关研究方向的本科/硕士/博士;
自动驾驶多传感器(2D/3D)感知、标定相关算法工程人员;
想要转入自动驾驶方向,并希望能够深入多传感器标定算法的小伙伴;
本课程需要具备的基础
具有一定的C++或python基础,熟悉深度学习常用的一些基础算法;
对自动驾驶中的多传感器的应用有一定了解;
一定的高等数学、线性代数、矩阵理论基础;
学后收获
对多传感器标定所有主流方案有着深入理解,在产线、离线、在线标定中精度能达到量产级别;
学习到自动驾驶多传感器标定的算法,从根本上学会如何进行手动和自动标定;
能够精通常用多传感器标定算法,理论实践并重,无论是学术界抑或工业界都能直接复用;
学完本课程能够达到2年左右的自动驾驶标定工程师水平;
能够结识许多行业从业人员与学习合作伙伴!
开课时间与学习方式
2023年5月30日已经正式开始学习之路,历经两个月,离线视频授课。主讲老师在微信学习群内答疑,对课程中的算法、代码、环境配置等问题一一解惑!
课程咨询购买
开课优惠!扫码加入一起学习!

扫码添加汽车人助理咨询课程!(微信:AIDriver004)
















 780
780











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









