






编辑 | 自动驾驶专栏
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【多传感器融合】技术交流群
本文只做学术分享,如有侵权,联系删文
论文链接:https://arxiv.org/pdf/2307.08850.pdf
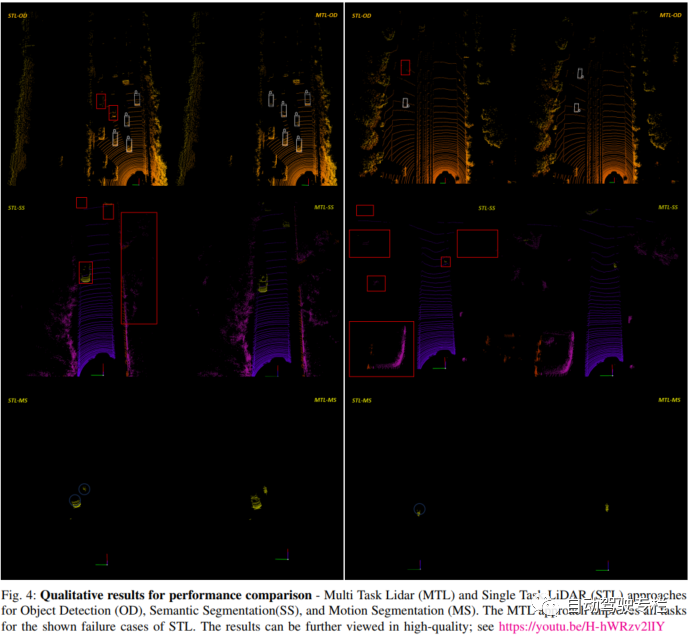
视频链接:https://youtu.be/H-hWRzv2lIY

摘要

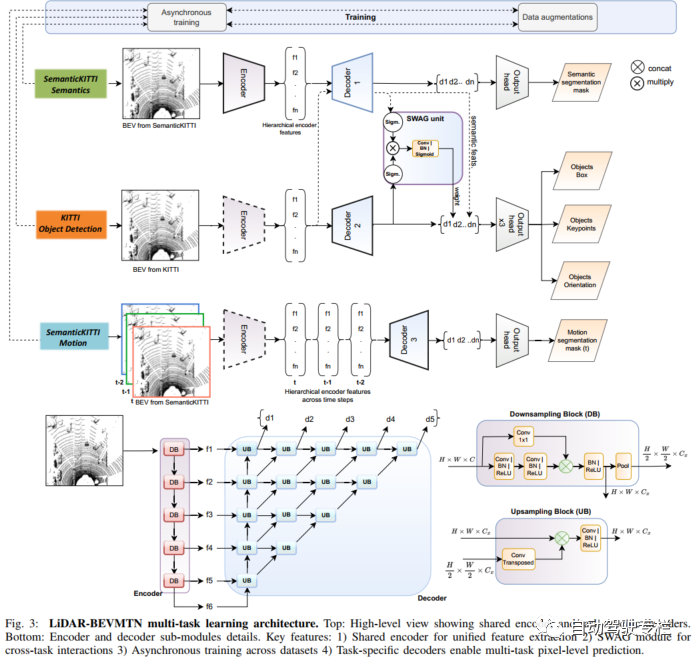
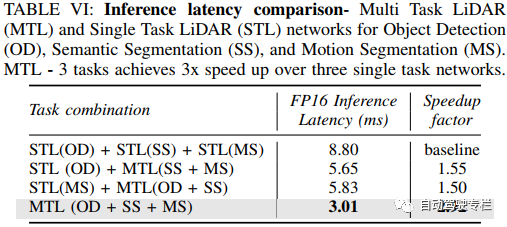
本文介绍了LiDAR-BEVMTN:自动驾驶中的实时激光雷达鸟瞰图多任务感知网络。激光雷达对于自动驾驶中鲁棒的3D场景感知至关重要。激光雷达感知具有仅次于相机感知的最多的文献。然而,使用激光雷达进行检测、分割和运动估计等任务的多任务学习仍然相对未经探索,尤其是在车载级嵌入式平台上。本文提出一种实时的多任务卷积神经网络,用于基于激光雷达的目标检测、语义和运动分割。统一的框架包含共享编码器和任务专用解码器,实现联合表示学习。本文提出一种新型的语义加权和引导(SWAG)模块来选择性地迁移语义特征,以改进目标检测。本文的异构训练策略结合各种数据集,并且利用了任务之间的互补线索。该工作提供了首个嵌入式实现,将这些来自激光雷达点云的感知任务统一起来,在嵌入式NVIDIA Xavier平台上实现3ms延迟。我们在语义和运动分割这两项任务上取得最先进的结果,并且在3D目标检测任务上获得接近最好的性能。通过最大化硬件效率并且利用多任务协同,本文方法提供了一个精确且高效的解决方案,专为现实世界自动驾驶部署量身定制。

主要贡献

本文的主要贡献总结如下:
1)本文提出一种实时多帧扫描的多任务CNN框架,用于从激光雷达点云中进行联合目标检测、语义分割和运动分割;
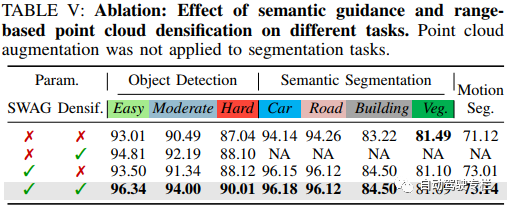
2)本文提出了一种语义加权和引导(SWAG)模块,其选择性地迁移相关语义特征,以提高目标检测精度;
3)本文提出一种异构训练策略,将不同的数据集结合起来,并且利用多任务协同;
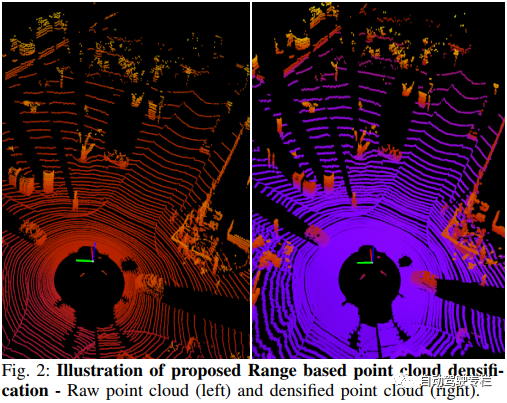
4)本文提出一种简单而有效的基于距离的点云稠密化技术,以丰富目标边界并且改进远距离检测;
5)本文在嵌入式平台NVIDIA Xavier AGX开发套件上进行了大量的消融研究,并且证明了其实时能力。

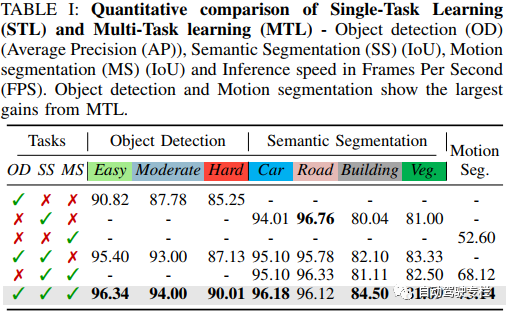
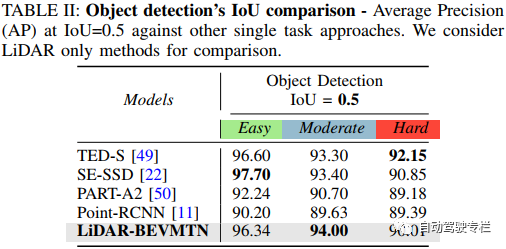
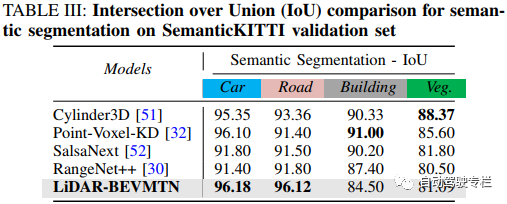
论文图片和表格


总结

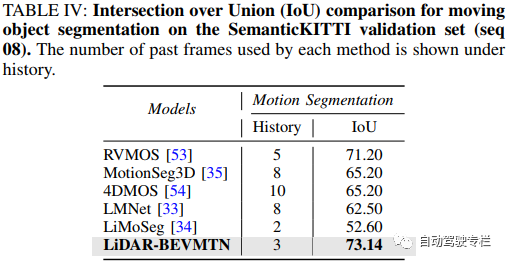
在这项工作中,我们提出了LiDAR-BEVMTN,这是一种用于从激光雷达点云中进行联合目标检测、语义分割和运动分割的多任务神经网络。本文提出的模型在具有挑战性的KITTI和SemanticKITTI数据集上的所有三项任务中均取得最先进的结果。据我们所知,这是首项在KITTI和SemanticKITTI上使用多任务深度学习来共同处理这些特定任务的工作。本文的结果和分析证明了多任务学习在组合3D感知方面的优势。尽管多任务使用连续激光雷达扫描,但是我们在嵌入式车载平台上实现了3ms的低延迟。今后工作包括将该方法扩展到其它感知任务中,例如自动驾驶中的里程计、自车运动估计和速度预测。我们希望这项工作能够提供有用的见解,并且推动基于激光雷达场景理解的多任务深度学习的持续研究。
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、协同感知、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码学习)
 视频官网:www.zdjszx.com
视频官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
近2000人的交流社区,涉及30+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(2D检测、分割、2D/3D车道线、BEV感知、3D目标检测、Occupancy、多传感器融合、多传感器标定、目标跟踪、光流估计)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!
③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、点云处理、端到端自动驾驶、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

















 383
383

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









