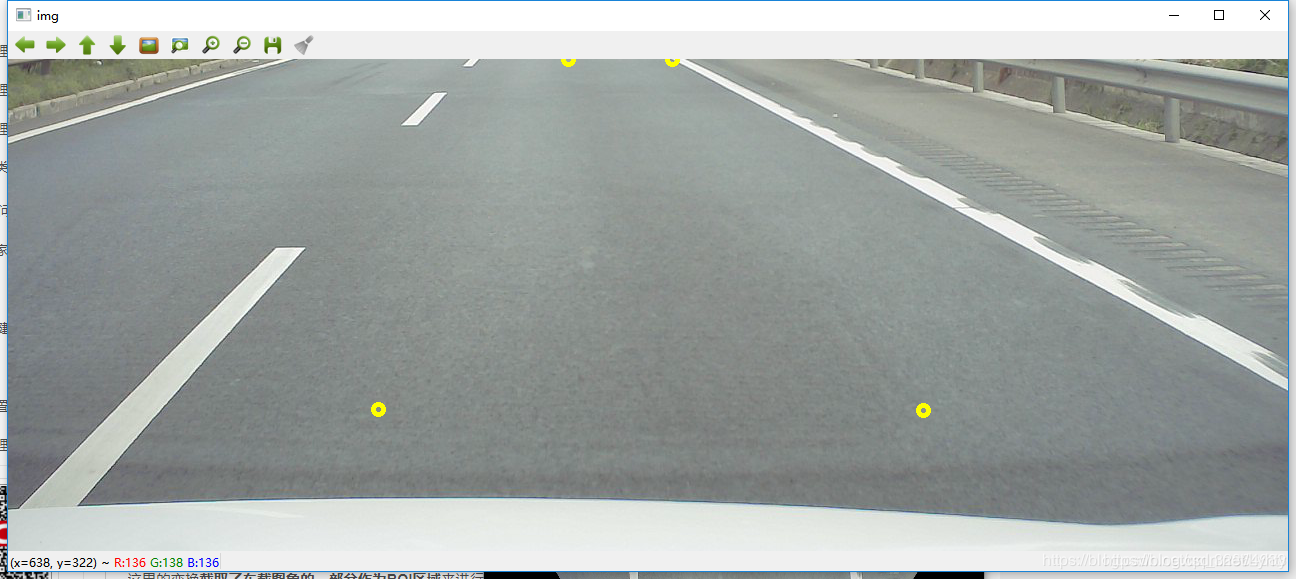
为什么需要转换为鸟瞰图呢? 因为在检测车道线,需要根据车道线宽度设计合适的滤波器进行噪声剔除,因为车载相机拍出来的图片近处的车道线较宽而远处的车道线较窄,所以需要将图片转换为鸟瞰图。这是车载相机拍摄的图片,下图为它对应的转换的鸟瞰图。所利用的方法即 单应性变换。 单应性变换 单应性变换是将一个平面内的点映射到另一个平面内的二维投影变换。在这里,平面是指图像或者三维中的平面表面。 如果场景是平面,或者近似平面,或者低视差时,能应用单应性矩阵(homography)


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




























 375
375





