






作者 | 派派星 编辑 | CVHub
点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
本文只做学术分享,如有侵权,联系删文
导读
YOLO(You Only Look Once)是一个著名的物体检测和图像分割模型,由Joseph Redmon和Ali Farhadi在华盛顿大学开发。自2015年推出以来,它以其高速度和高准确性赢得了广泛的认可。
2016年发布的YOLOv2通过引入批量归一化、锚框对原版进行了改进。
2018年的YOLOv3采用了更高效的骨干网络、多锚框策略和空间金字塔池来提升模型性能。
2020年推出的YOLOv4引入了诸如Mosaic数据增强、新的无锚检测头和新的损失函数等创新技术。
同年,YOLOv5进一步提升了模型性能,并添加了超参数优化、集成实验跟踪和自动导出格式等功能。
2022年由美团开源的YOLOv6现已被应用于该公司众多自主配送机器人的场景中。
YOLOv7则新增了额外的任务,例如COCO关键点数据集中的姿势估计。
YOLOv8支持多种视觉AI任务,包括检测、分割、姿态估计、追踪和分类。这一多功能特性使得用户可以在不同应用和领域中充分利用YOLO的能力。
YOLOv9引入了可编程梯度信息(PGI)和广义高效层聚合网络(GELAN)等创新方法。
YOLOv10则是由清华大学的研究团队基于Ultralytics Python软件包构建的。此版本通过采用端到端头并取消非最大抑制(NMS)需求,实现了实时目标检测的突破。

在前不久结束的YOLO Vision 2024(YV24)大会上,Ultralytics 正式发布了YOLO家族的最新成员——YOLO11。
YOLO11
YOLO11不仅仅是一次简单的升级,它代表了计算机视觉领域的一次质的飞跃。Ultralytics的创始人兼CEO Glenn Jocher表示:'YOLO11的设计旨在为现实世界的应用提供强大而实用的解决方案。它提高的效率和准确性使其成为一个可以适应各行各业独特挑战的强大工具。'
官方链接:https://github.com/CVHub520/X-AnyLabeling
核心优势:
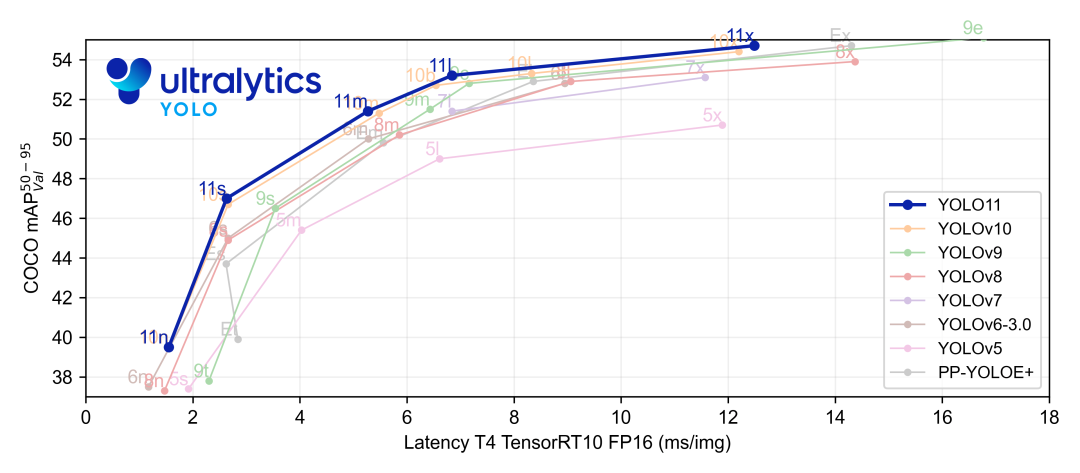
性能飞跃:在COCO数据集上,YOLO11m比YOLOv8m使用22%更少的参数,却实现了更高的平均精度(mAP)。
速度提升:推理速度比YOLOv10快约2%,为实时应用提供了更好的支持。
多功能性:支持目标检测、实例分割、图像分类、姿态估计、定向目标检测(OBB)和目标跟踪等多种任务。
增强的特征提取:改进的架构设计使得YOLO11能够更准确地捕捉图像中的复杂细节。
优化的训练方法:增强了模型的适应性,使其更容易应用于不同规模的项目。
新特性
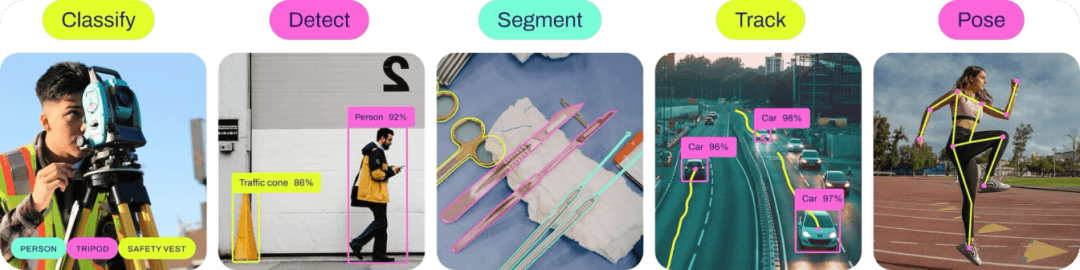
高精度目标检测:更准确的边界框绘制,适用于监控、自动驾驶和零售分析等领域。
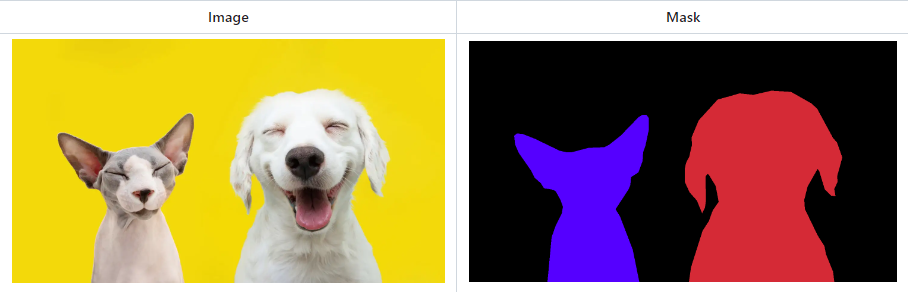
像素级实例分割:精确分离图像中的个体对象,为医疗影像和工业缺陷检测提供有力支持。
先进的图像分类:轻松对整张图片进行分类,极大便利电子商务产品分类和野生动物监测等应用。
精确姿态估计:准确检测关键点,为健身追踪、运动分析和医疗保健带来新可能。
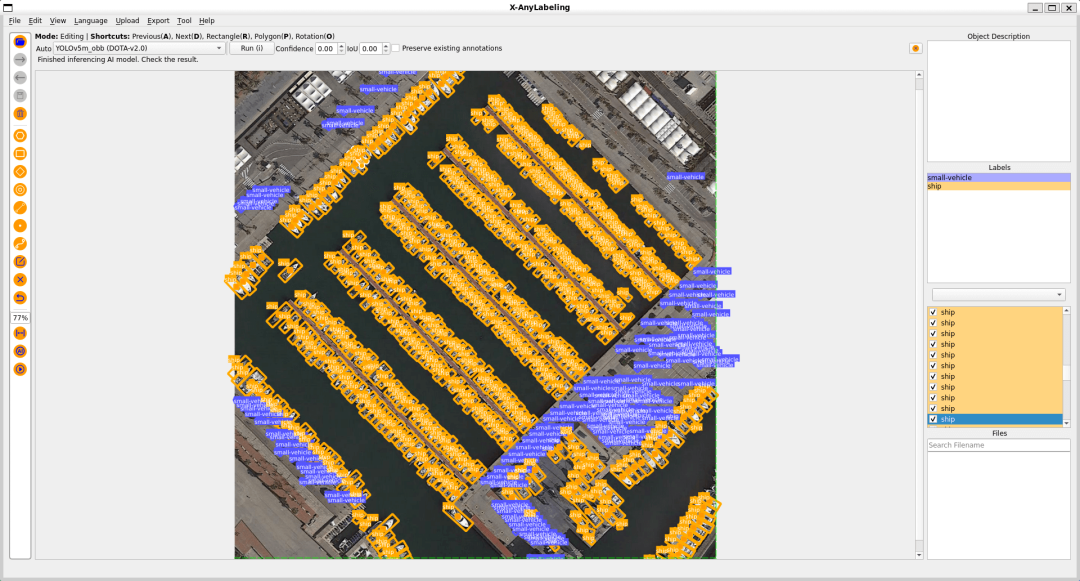
定向目标检测(OBB):精准定位旋转物体,尤其适用于航空影像、机器人技术和仓库自动化。
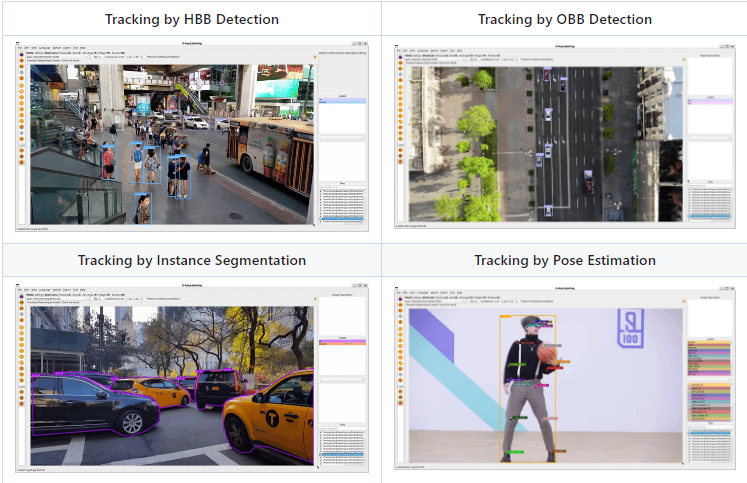
实时目标跟踪:跨帧监控和追踪移动物体,为众多实时应用提供关键支持。
X-AnyLabeling
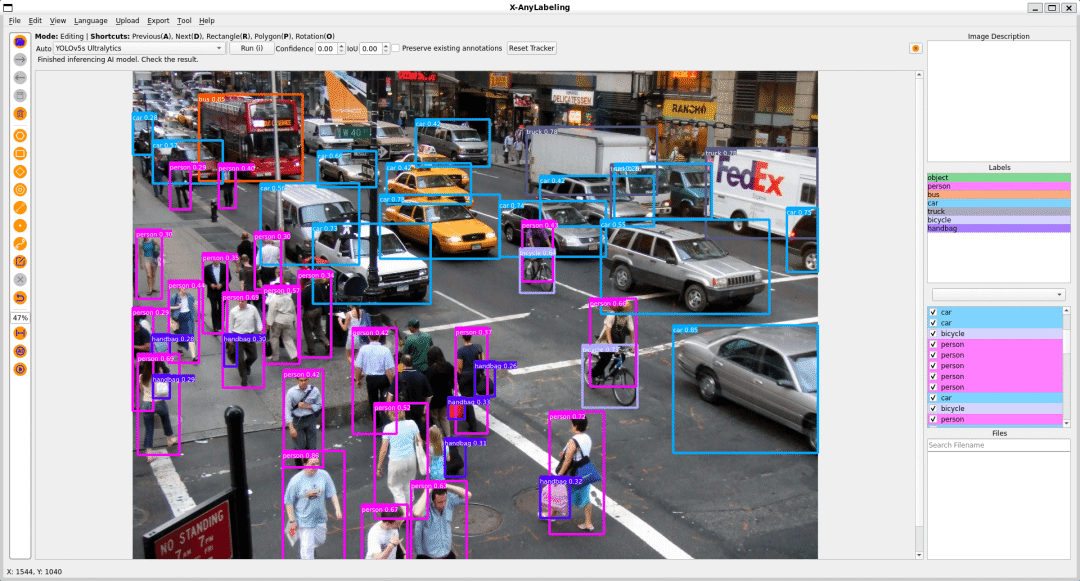
作为一款与时俱进的AI视觉标定工具,X-AnyLabeling v2.4.4 版本现以全面集成 YOLO11 全系列模型,首批上线包括以下功能:
图像分类
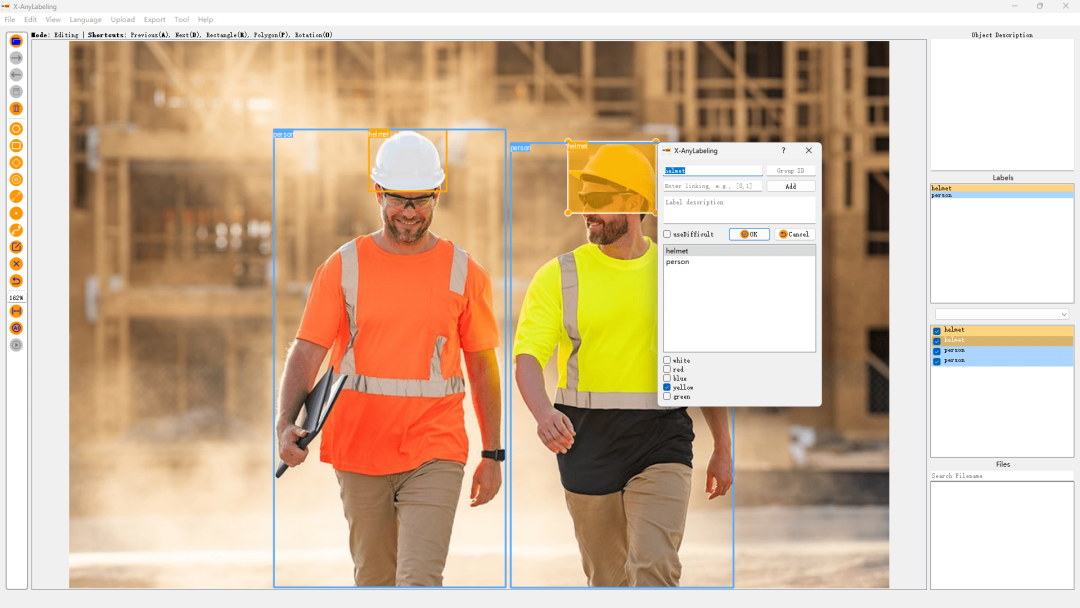
目标检测
实例分割
关键点检测
旋转目标检测
同时,针对不同的任务也适配了对应的跟踪算法,欢迎尝试:
项目主页:https://github.com/CVHub520/X-AnyLabeling
安装教程:https://github.com/CVHub520/X-AnyLabeling/blob/main/docs/zh_cn/get_started.md
用户手册:https://github.com/CVHub520/X-AnyLabeling/blob/main/docs/zh_cn/user_guide.md
总结
总的来说,本次更新的 YOLO11 模型是基于 YOLOv8 开发的,网络结构方面整体变化不大,采用 C3K2 替换掉了原先的 C2 和 C3 块,并新增了一个类似于自注意力的特征增强模块——C2PSA。检测头部分延续了 YOLOv8,因此后处理解析步骤基本相同。根据社区的反馈,精度方面喜忧参半。
『自动驾驶之心知识星球』欢迎加入交流!重磅,自动驾驶之心科研论文辅导来啦,申博、CCF系列、SCI、EI、毕业论文、比赛辅导等多个方向,欢迎联系我们!
① 全网独家视频课程
端到端自动驾驶、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)

② 国内首个自动驾驶学习社区
国内外最大最专业,近4000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(端到端自动驾驶、世界模型、仿真闭环、2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦感知、定位、融合、规控、标定、端到端、仿真、产品经理、自动驾驶开发、自动标注与数据闭环多个方向,目前近60+技术交流群,欢迎加入!扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】全平台矩阵
















 1560
1560

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









