



作者 | Junjie Lu 编辑 | 深蓝AI
点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
本文只做学术分享,如有侵权,联系删文
导读:在无人机领域,如何实现障碍物密集环境下⽆⼈机⾼速⾃主⻜⾏⼀直是⼀⼤挑战。本⽂将深⼊解读这项⼯作,并探讨它是如何通过端到端轨迹规划算法实现毫秒级的规划速度与⾼速⻜⾏的能⼒。
本文由paper一作——Junjie Lu 授权【深蓝AI】编译发布!
论⽂题目:You Only Plan Once: A Learning-Based One-Stage Planner With Guidance Learning
论文作者:Junjie Lu , Xuewei Zhang , Hongming Shen,LiwenXu , and Bailing Tian
论文地址:https://ieeexplore.ieee.org/document/10528860

在无人机领域,实现自主路径规划是一个重要的主题,它涉及到在给定环境下生成一条从起点到终点的无碰撞最优路径。目前的主流算法如Fast-Planner等主要通过获取图像->建图->前端路径搜索->后端轨迹规划这⼀框架实现满足无人机运动学和动力学的最优路径生成。但是,受建图与前端路径搜索耗时的影响,导致规划速度很难有大的提升,进而限制了无人机高速飞行的能力。为减小耗时,实现毫秒级的规划速度,作者提出了⼀种名为You Only Plan Once (YOPO) 的端到端规划算法,通过端到端的方式去除建图与前端路径搜索过程,实现从获取图像直接到轨迹规划,为规划算法节省大量时间,使得高速飞行成为可能。
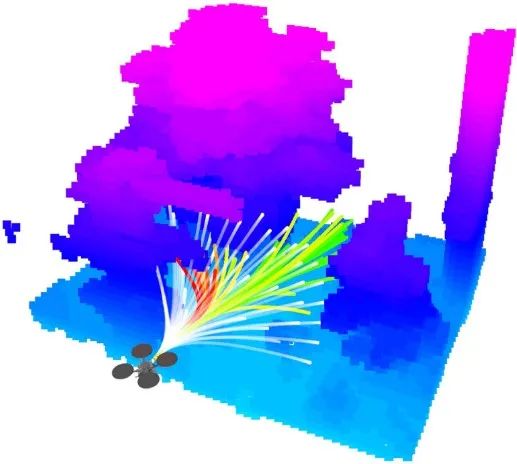
▲图1 YOPO轨迹规划图

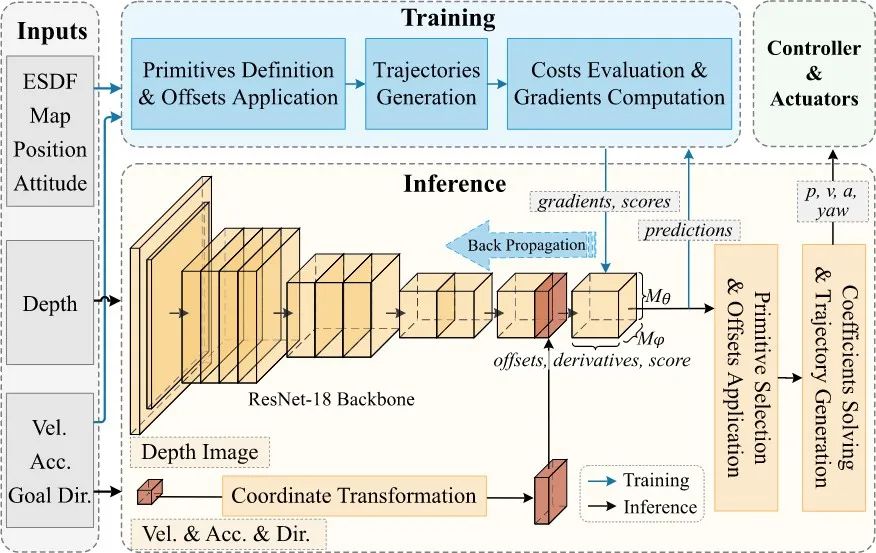
▲图2 系统概述:YOPO算法以深度图像、当前状态和目标方向作为输入,并预测每个原始轨迹的偏移 量、末端导数和得分。
YOPO算法框架如上图所示,主干网络为ResNet-18,网络策略的输入为深度图像(表示环境的深度信息)、当前状态(无人机的当前位置、速度和加速度等)以及目标方向(表示无人机的目标位置或方向);输出为偏移量(表示每个原始轨迹的偏移量,用于调整无人机的运动路径)、末端导数(表示每个原始轨迹的末端导数,用于描述轨迹的末端状态)以及得分(表示每个原始轨迹的得分,用于评估轨迹的可行性)。
 YOPO算法将运动规划问题定义为空间分离的多项式轨迹和相关分数的回归。通过采用一组运动基元来覆盖搜索空间,并在前向传播中预测基元的偏移量和分数以进行局部优化。在训练阶段,作者提出了一种称为引导学习的无监督学习策略,被开发来提供数值梯度作为训练的指导。
YOPO算法将运动规划问题定义为空间分离的多项式轨迹和相关分数的回归。通过采用一组运动基元来覆盖搜索空间,并在前向传播中预测基元的偏移量和分数以进行局部优化。在训练阶段,作者提出了一种称为引导学习的无监督学习策略,被开发来提供数值梯度作为训练的指导。
■3.1基元坐标系
在YOPO算法中,基元坐标系的设计是实现精确运动规划的关键基础。该系统首先对输入的深度图像进行结构化划分,将图像在垂直和水平方向分别均匀划分为和块,从而形成了⼀个网格化的结构,总计包含个区块。这种划分方式确保了对整个空间的系统性覆盖,如下图所示。
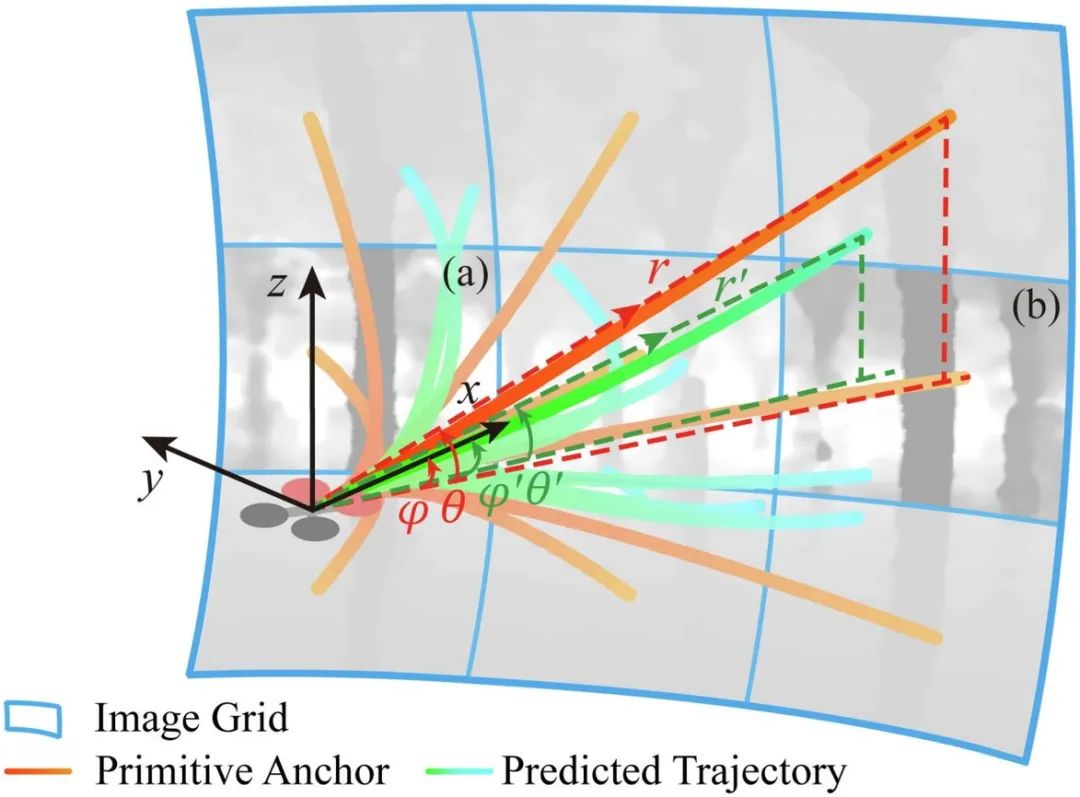
▲图3 基元坐标系
每个锚点采用球坐标系表示,其初始位置定义为:

为实现精确的位置控制,系统使用ResNet-18网络预测位置偏移量。考虑偏移量后,锚点的实际位置变为:

其中:
网络输出的偏移量具有维度,包含位置、速度和加速度等信息。这些偏移量通 过如下变换计算:

这种坐标系统设计既保证了对空间的完整覆盖,又通过偏移机制实现了精确的局部调整,为后续的运动规划奠定了基础。
■3.2时间轨迹系数求解
上一节中ResNet-18输出的偏移量信息主要用来实现本节的时间轨迹求解。轨迹采用五次多项式来表示无人机在三维空间中的平滑运动,对于每个空间维度,其位置轨迹可以表示为:

在规划过程中,对于一段轨迹,只需要考虑起始时刻t = 0和终止时刻t=T的边界条件。这些边界条件构成了一个线性方程组,可以表示为矩阵形式,其中是包含起始时刻(当前位置,速度,加速度,已知)和终止时刻(锚点的偏移位置,偏移速度,偏移加速度,偏移量由ResNet-18输出)边界条件的向量,M是系数矩是待求解的多项式系数向量。通过求解方程,可以得到轨迹多项式的系数。在实际应用中,可以被分解为已知量和可调偏移量,即需求灵活调整轨迹参数。
■3.3引导学习
作者采用基于Actor-Critic框架的引导学习方法来训练无人机端到端轨迹规划。与传统需要拟合的 Critic网络不同,这里直接使用已知的代价方程作为引导用的Critic,使学习过程更加稳定和高效。系统的整体代价函数由三个部分组成,表示为:
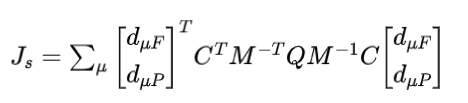
其中平滑代价确保轨迹连续性,通过系数矩阵计算:
避障代价通过指数函数评估安全距离:

目标代价度量终点精度:
得分估计通过最小化损失函数得到,其中为ResNet-18预测得分。这种引导学习的方法结合确定性代价函数和深度学习网络,提供了一个高效的端到端轨迹规划解决方案。
 论文中的实验设计旨在验证YOPO端到端无人机规划算法的毫米级规划速度与高速飞行能力。
论文中的实验设计旨在验证YOPO端到端无人机规划算法的毫米级规划速度与高速飞行能力。
■4.1硬件配置
在硬件配置方面,作者使用了RealSense D455深度相机获取16:9宽高比的深度图像,并将其缩放至160×96分辨率。实验平台采用了i7-9700 CPU和RTX 3060 GPU运行Flightmare模拟器,同时在实际平台上使用NVIDIA Xavier NX作为计算单元进行验证。

▲图4 YOPO无人机硬件平台
■4.2性能比较
在性能比较方面,作者将所提出的方法与多个现有方法进行了对比,包括TopoTraj、MPPI Planner和Agile Autonomy等。通过在不同障碍物密度(1/30和1/20 tree/m²)和不同速度(2-10 m/s)条件下的测试,评估了算法在计算延迟、安全性和轨迹平滑度等多个指标上的表现。结果如下图所示,该方法在1.6ms的规划时间下就能完成推理,明显优于其他方法,同时在安全性指标上也展现出了较好的性能。
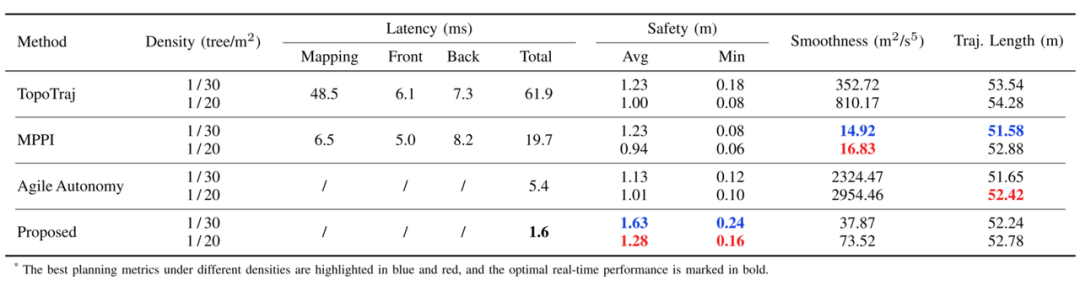 ▲图5 YOPO与其他主流算法性能比较
▲图5 YOPO与其他主流算法性能比较
■4.3真机实验
在真机实验环节,作者使用了一台配备250mm直径、重1.13kg的四旋翼飞行器进行验证。飞行器搭载RealSense D455相机(87°×58° FOV,6m感知范围)和Xavier NX计算单元。实验在密度为1/10 tree/m²、树木直径约0.25m的密集森林环境中进行。实验结果如下图所示,该方法能够在实际场景中有效处理有限的深度观测和有限的传感器范围等挑战,成功实现了最⾼5.52m/s的高速飞行。这些结果验证了该方法在实际应用中的可行性和优越性。
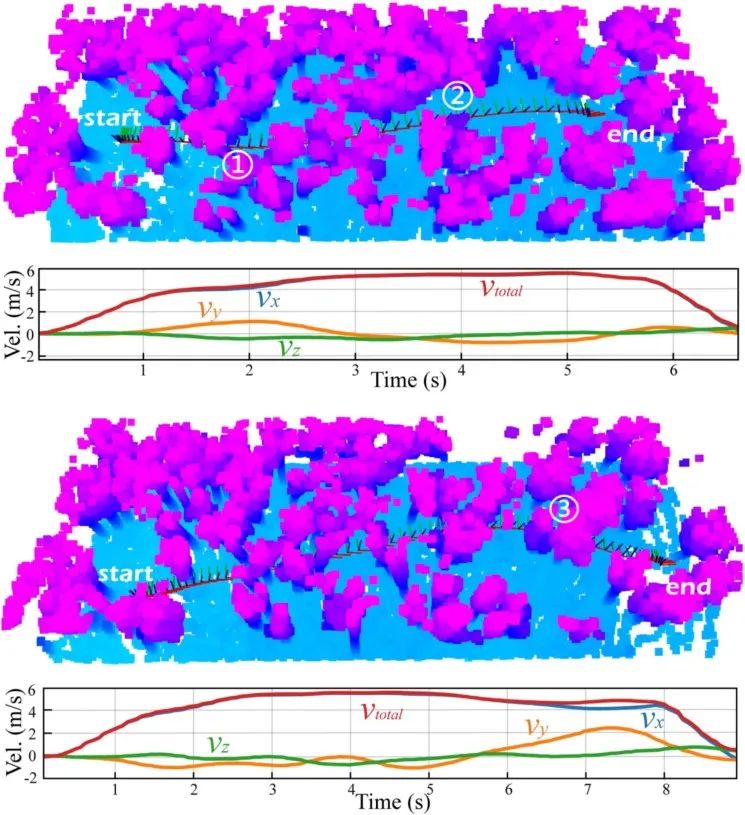
▲图6 障碍物密集环境下的飞行轨迹与速度
 端到端无人机规划算法YOPO将感知和建图、前端路径搜索以及后端优化集成到ResNet-18网络中。通过采用一组运动基元来覆盖搜索空间,并在前向传播中预测所有基元的偏移量和得分。通过对比实验,所提出的方法实现毫米级规划时间,并在与主流规划算法的比较中表现出了更优越的性能。
端到端无人机规划算法YOPO将感知和建图、前端路径搜索以及后端优化集成到ResNet-18网络中。通过采用一组运动基元来覆盖搜索空间,并在前向传播中预测所有基元的偏移量和得分。通过对比实验,所提出的方法实现毫米级规划时间,并在与主流规划算法的比较中表现出了更优越的性能。
Ref:
You Only Plan Once: A Learning-Based One-Stage Planner With Guidance Learning
① 2025中国国际新能源技术展会
自动驾驶之心联合主办中国国际新能源汽车技术、零部件及服务展会。展会将于2025年2月21日至24日在北京新国展二期举行,展览面积达到2万平方米,预计吸引来自世界各地的400多家参展商和2万名专业观众。作为新能源汽车领域的专业展,它将全面展示新能源汽车行业的最新成果和发展趋势,同期围绕个各关键板块举办论坛,欢迎报名参加。

② 国内首个自动驾驶学习社区
『自动驾驶之心知识星球』近4000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(端到端自动驾驶、世界模型、仿真闭环、2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎扫描加入

③全网独家视频课程
端到端自动驾驶、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)

④【自动驾驶之心】全平台矩阵


















 441
441

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









