






今年6月清华、上海AI lab、西工大、浙大和中国电讯的论文将大语言模型 (LLM) 的推理能力应用于具身任务,实现具身多智体协作的高效LLM落地。现在入局自动驾驶正当时!

LLM-Agents可以说是为自动驾驶研究工作开辟了新道路,LLM Multi-Agent结合自动驾驶将成为2025年研究热点!因此研梦非凡于12月20日晚(周五),邀请了从事多模态大模型研究的王导师,为大家独家讲解《大模型的下一站:LLM-Multi Agent》(AI前沿直播课NO.88),主要讲解ACL'24的前沿研究。
从LLMs的行业热点及顶会热门方向入手,到多智能体的创新点和相关工作详解,重点讲解多智能体算法框架、实验要点,并具体演示代码。(文末查看5位导师现有课题)
👇🏻扫描二维码找助教0元预约直播课!

凡预约即可免费领取200余篇相关论文(40篇LLM-Multi Agent与自动驾驶结合工作+20篇多智能体+70篇多模态+120篇大模型)
直播课课程大纲
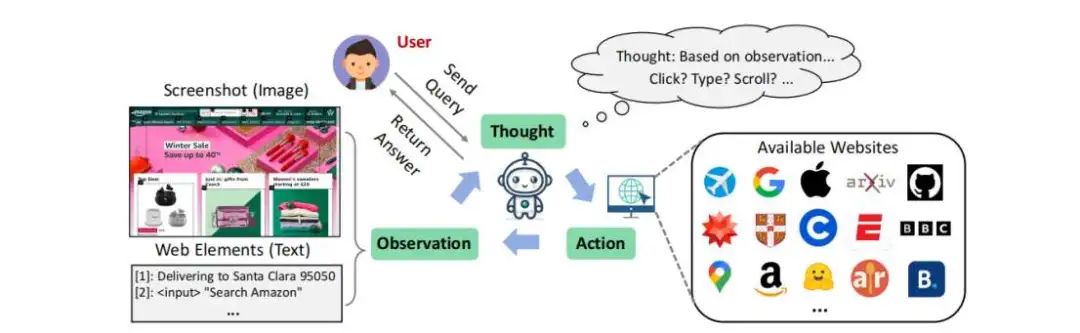
《WebVoyager: Building an End-to-End Web Agent with Large Multimodal Models》
一、多模态智能体核心根据
行业热点
2025顶会热门方向
大语言模型智能体的应用
多模态大语言模型的迅速发展
二、找创新点
思考研究现状
Web操作自动化的研究意义
目前智能体在Web操作上关注什么?
目前Benchmark关注什么?
创新点
提出了一个多模态的Web智能体WebVoyager
提出了一个真实Web世界任务,并引入了一个自动评估协议
三、相关工作详解
大模型智能体应用
智能体在Web操作中的应用
多模态大语言模型
👇🏻扫描二维码找助教0元预约直播课!

凡预约即可免费领取200余篇相关论文(40篇LLM-Multi Agent与自动驾驶结合工作+20篇多智能体+70篇多模态+120篇大模型)
四、算法框架
Browsing Environment
Observation Space
Action Space
五、实验要点
Benchmark for WebVoyager
Data Construction
Experimental Details
Results and Discussion
六、探索
WebVoyager Python代码实现
👇🏻扫描二维码找助教0元预约直播课!

凡预约即可免费领取200余篇相关论文(40篇LLM-Multi Agent与自动驾驶结合工作+20篇多智能体+70篇多模态+120篇大模型)
ps:研梦非凡开设的前沿论文系列直播,旨在帮助大家提升读论文技能,快速抓住重点,掌握有效方法,进而找到创新点,轻松完成论文工作。(下滑查看导师现有课题)
研梦非凡科研论文指导服务
如何快速找到idea,如何正确的选择模型,怎么避免与其他工作重复, 什么样的实验计划省时效果显著,一边实验一边出论文初稿技能,针对不同的期刊会议绘图方法,终稿完善,投稿策略,期刊/会议选择,response,直到accpet!研梦非凡全程陪伴你产出科研成果!

<<< 左右滑动见更多 >>>
如果你需要发CCF A会-C会、SCI一区-四区、EI会议/EI期刊、毕业大论文、毕业设计等,都可以扫码来研梦非凡匹配合适的论文指导服务。

研梦非凡导师团队
研梦非凡的导师来自海外QStop50、国内华五、C9、985高校的教授/博士导师/博士后,世界500强公司算法工程师,以及国内外知名人工智能实验室研究员。这是一支实力强大的高学历导师团队,在计算机科学、机器学习、深度学习等领域,积累了丰富的科研经历,研究成果也发表在国际各大顶级会议和期刊上,在指导学员的过程中,全程秉持初心,坚持手把手个性化带教。包括但不限于以下导师~~
我们为自动驾驶方向的同学整理了导师们现有课题及目标会议/期刊区位:
<<< 左右滑动见更多 >>>
扫码加助教为你匹配合适课题的大牛导师

我们不是小作坊哦~我们背靠研途考研(就是张雪峰老师和徐涛老师在的那个研途考研),做教育十余年,重交付,重口碑,是我们一贯的公司理念!


















 1784
1784

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









