






基于模型预测控制(mpc)的车辆换道,车辆轨迹跟踪,换道轨迹为五次多项式,matlab与carsim联防控制
YID:1550680497837661
一無所有`

基于模型预测控制(MPC)的车辆换道,是一种先进的控制方法,它通过预测车辆未来的行驶轨迹,以及对当前环境的感知,实现车辆的安全、稳定地换道行驶。本文将以MPC算法为核心,结合五次多项式生成换道轨迹,并介绍与Matlab与Carsim的联合仿真实现。
在车辆的自动驾驶技术中,换道行为是一项关键的功能之一。对于自动驾驶车辆而言,能够准确地进行换道行驶是确保道路交通安全的重要任务。而MPC作为一种先进的控制方法,已经被广泛应用于车辆的轨迹跟踪、转向控制等方面。
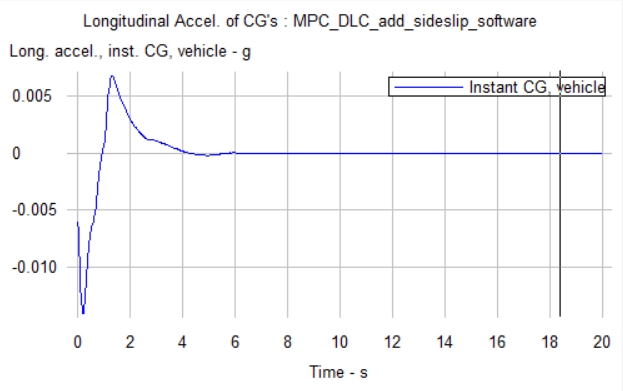
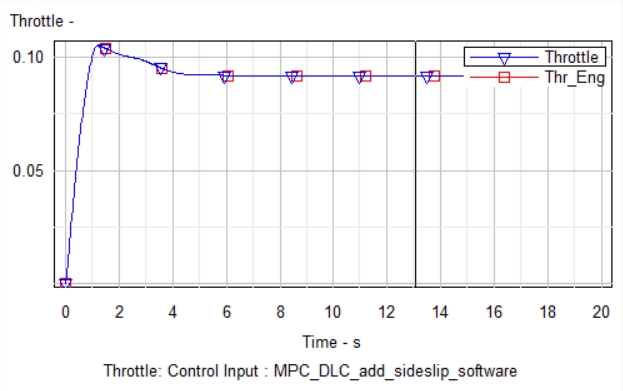
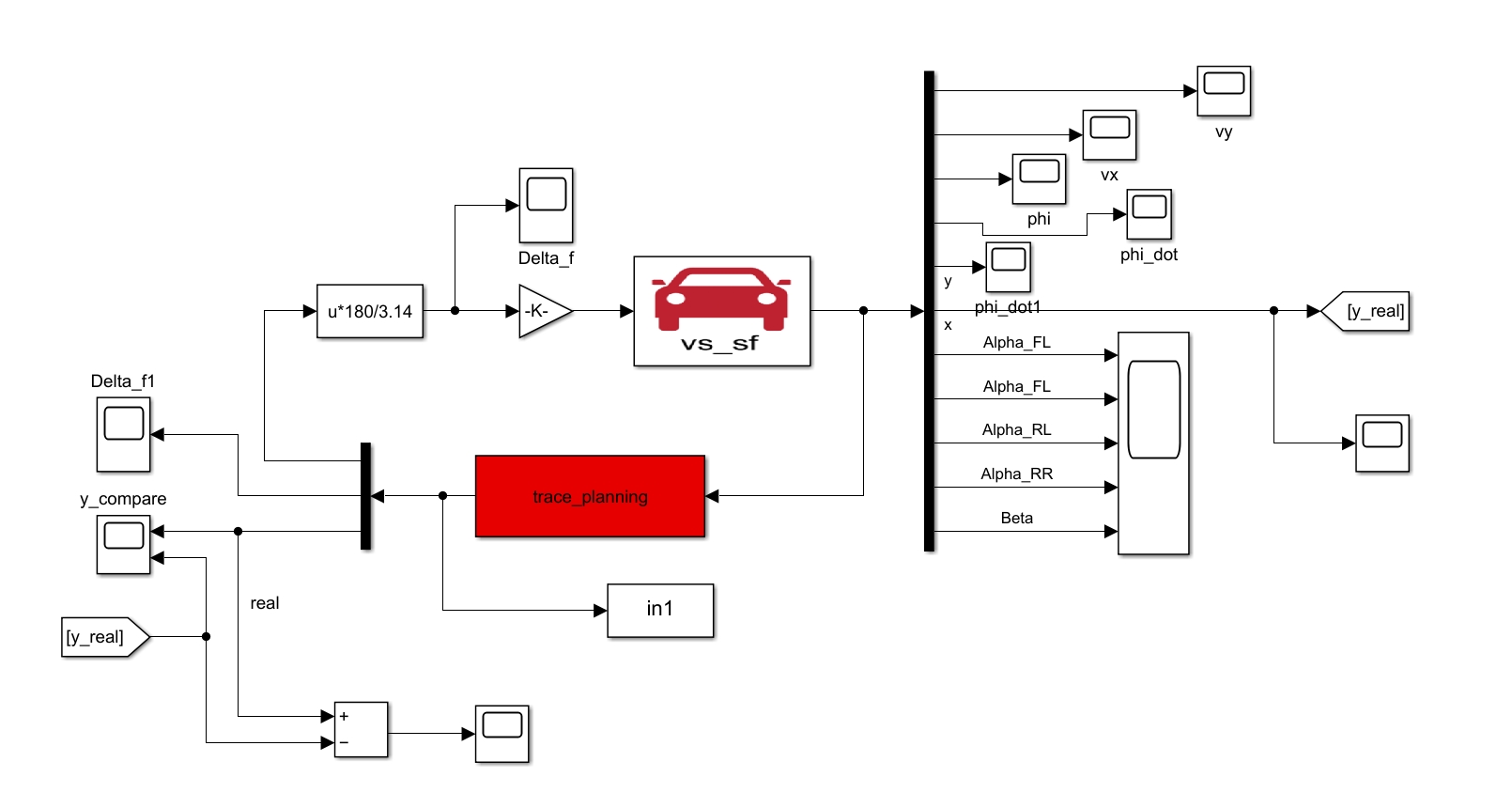
MPC算法的核心思想是通过对车辆和环境的建模,根据预测的车辆轨迹来生成最优控制策略。在车辆换道中,MPC算法可以通过对车辆的动力学模型进行数学建模,并根据当前车辆状态和环境感知信息,预测车辆未来的行驶轨迹。通过优化控制策略,使车辆能够按照预定的换道轨迹安全、稳定地进行换道行驶。
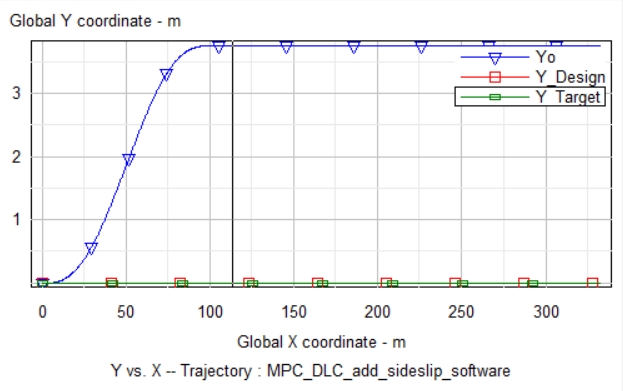
为了生成符合要求的换道轨迹,本文采用了五次多项式来描述车辆换道的路径。五次多项式具有较高的灵活性和逼近能力,能够精确地描述车辆的换道轨迹。通过合理选择换道轨迹的起始点、朝向角以及路径曲率等参数,可以生成符合实际道路情况的换道路径。
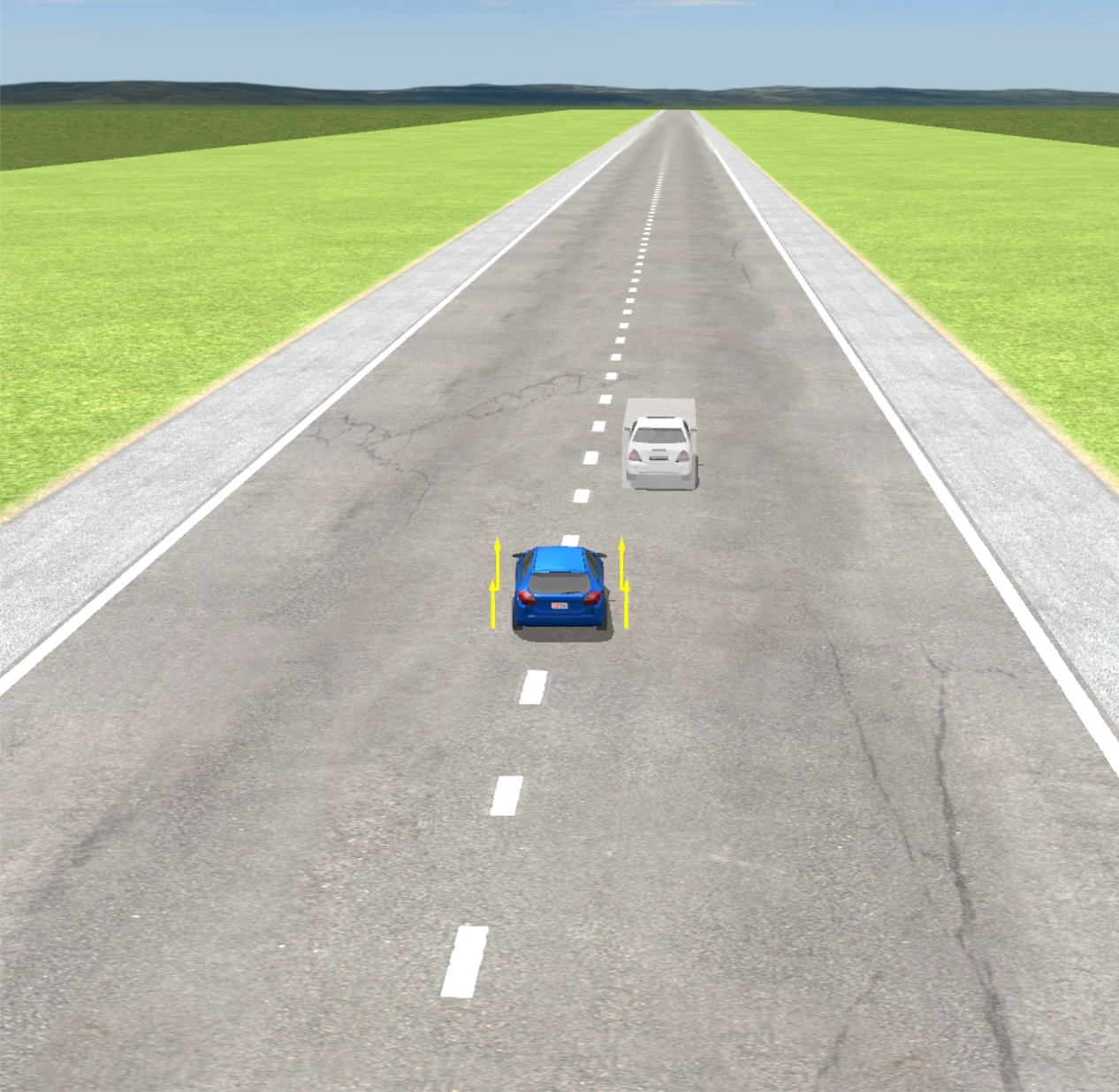
为了验证基于MPC算法的换道控制策略的性能,本文采用了Matlab与Carsim的联合仿真实现。Matlab作为一种强大的数学建模与仿真工具,可以方便地对MPC算法进行实现和验证。而Carsim则提供了真实车辆动力学模型的仿真环境,可以对车辆的换道行为进行真实场景的模拟。
通过Matlab与Carsim的联合仿真,我们可以有效地评估MPC算法在车辆换道控制中的性能。通过对不同换道场景下的仿真实验,可以验证MPC算法的鲁棒性和控制效果。同时,由于MPC算法的灵活性,可以通过调整控制参数来适应不同的换道需求,实现个性化的换道行驶。
综上所述,基于模型预测控制的车辆换道是一种先进的控制方法,可以实现车辆的安全、稳定地换道行驶。通过采用五次多项式来描述换道轨迹,并结合Matlab与Carsim的联合仿真实现,可以有效地验证MPC算法的性能。未来,随着自动驾驶技术的不断发展,基于MPC的车辆换道控制将发挥越来越重要的作用,为道路交通安全和出行效率提供强有力的支持。
以上相关代码,程序地址:http://wekup.cn/680497837661.html















 706
706

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









