







多项式拟合算法
背景
给定离散的点 进行多项式的拟合
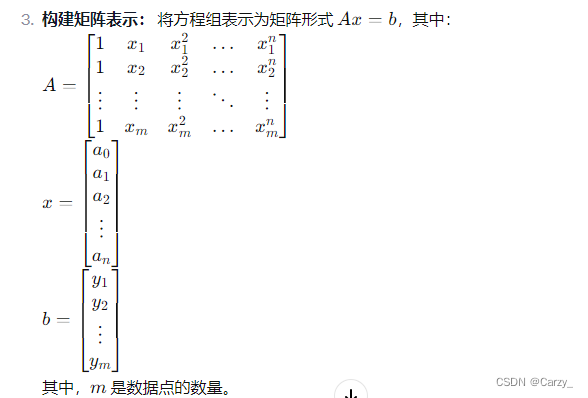
理论
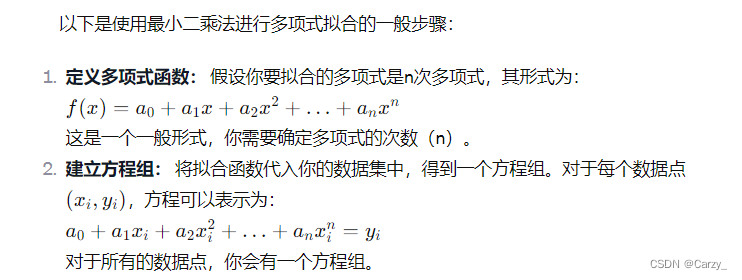
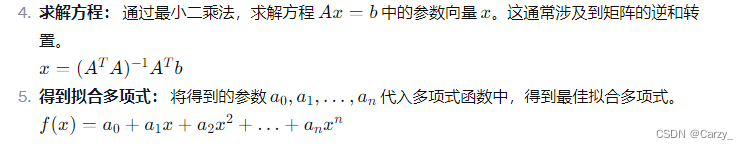
关于求解方程的推导可以通过投影的方式进行理解,即垂直距离最短,详细推导可以参考"矩阵-力量"P235 页
代码实现
#include <iostream>
#include <vector>
#include <cmath>
#include <Eigen/Dense>
#include <ros/ros.h>
#include <visualization_msgs/Marker.h>
using namespace std;
using namespace Eigen;
const int degree = 5;
void generateData(vector<double>& x, vector<double>& y) {
for (double i = 0.0; i <= 10.0; i += 0.5) {
x.push_back(i);
y.push_back(0.2 * pow(i, 5) - 1.5 * pow(i, 4) + 3.5 * pow(i, 3) + 2.0 * pow(i, 2) - 4.0 * i + 10.0);
}
}
void polynomialFit(const vector<double>& x, const vector<double>& y, VectorXd& coefficients) {
MatrixXd A(x.size(), degree + 1);
VectorXd b(x.size());
for (int i = 0; i < x.size(); ++i) {
for (int j = 0; j <= degree; ++j) {
A(i, j) = pow(x[i], j);
}
b(i) = y[i];
}
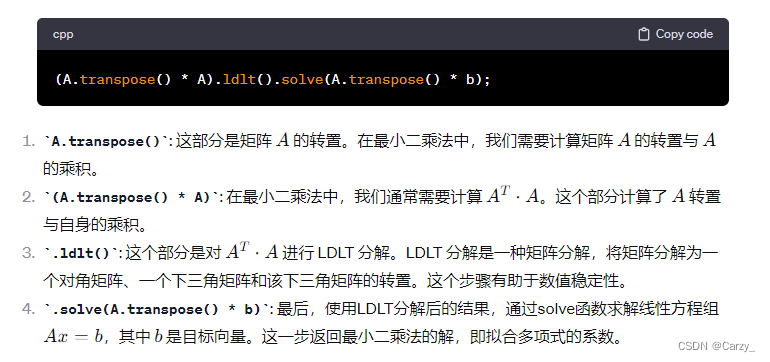
coefficients = (A.transpose() * A).ldlt().solve(A.transpose() * b);
}
void publishData(ros::Publisher& publisher, const vector<double>& x, const vector<double>& y, const VectorXd& coefficients) {
visualization_msgs::Marker points;
points.header.frame_id = "base_link"; // Change "base_link" to your desired frame
points.header.stamp = ros::Time::now();
points.ns = "points";
points.action = visualization_msgs::Marker::ADD;
points.pose.orientation.w = 1.0;
points.id = 0;
points.type = visualization_msgs::Marker::POINTS;
points.scale.x = 0.1;
points.scale.y = 0.1;
points.color.r = 1.0;
points.color.a = 1.0;
// Original Data
for (size_t i = 0; i < x.size(); ++i) {
geometry_msgs::Point p;
p.x = x[i];
p.y = y[i];
points.points.push_back(p);
}
// Fitted Data
visualization_msgs::Marker line_strip;
line_strip.header.frame_id = "base_link"; // Change "base_link" to your desired frame
line_strip.header.stamp = ros::Time::now();
line_strip.ns = "line";
line_strip.action = visualization_msgs::Marker::ADD;
line_strip.pose.orientation.w = 1.0;
line_strip.id = 1;
line_strip.type = visualization_msgs::Marker::LINE_STRIP;
line_strip.scale.x = 0.05;
line_strip.color.g = 1.0;
line_strip.color.a = 1.0;
for (double i = 0.0; i <= 10.0; i += 0.1) {
geometry_msgs::Point p;
p.x = i;
p.y = 0;
for (int j = degree; j >= 0; --j) {
p.y += coefficients(j) * pow(i, j);
}
line_strip.points.push_back(p);
}
publisher.publish(points);
publisher.publish(line_strip);
}
int main(int argc, char** argv) {
ros::init(argc, argv, "polynomial_fit_visualization");
ros::NodeHandle nh;
vector<double> x, y;
generateData(x, y);
VectorXd coefficients(degree + 1);
polynomialFit(x, y, coefficients);
ros::Publisher marker_pub = nh.advertise<visualization_msgs::Marker>("polynomial_fit_marker", 10);
ros::Rate loop_rate(1);
while (ros::ok()) {
publishData(marker_pub, x, y, coefficients);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
核心代码解释
最终效果显示















 5581
5581











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









