






论文名称:PUTN: A Plane-fifitting based Uneven Terrain Navigation FrameworkPUTN: A Plane-fifitting based Uneven Terrain Navigation FrameworkPUTN: A Plane-fifitting based Uneven Terrain Navigation Framework
研究背景:地面机器人的自主导航已广泛应用于室内或结构化二维环境,但在室外三维非结构化环境中,尤其是在崎岖不平的地形中,仍然存在许多挑战。为了解决这一问题,本文提出了一种基于平面拟合的非均匀地形导航框架(PUTN)。
实现过程:PUTN 的实现分为三个步骤。首先,在快速探索随机树(RRT)的基础上,提出了一种改进的基于样本的算法,称为平面拟合 RRT(PF- RRT*),以获得稀疏区域。每个采样点对应于点云上的自定义可遍历性指数和拟合平面。这些平面串联在一起,形成一个可穿过的条带。其次,利用高斯过程回归生成稀疏线段内插的稠密轨迹的可遍历性,并用采样树作为训练集。最后,利用非线性模型预测控制(NMPC)进行局部规划。通过在代价函数中加入可穿越性指标和不确定性,在约束函数中加入实时点云生成的障碍物,可以得到速度平滑、鲁棒性强的安全运动规划算法。
核心的三部分:1) 基于随机抽样和平面拟合的稀疏全局轨迹生成;2) 基于高斯过程回归 (GPR) 和线性插值的密集路径生成;3) 一种非线性模型预测控制 (NMPC) 规划器。
由于不太了解 RRT,我先对 RRT 算法做了一定了解:
RRT 算法
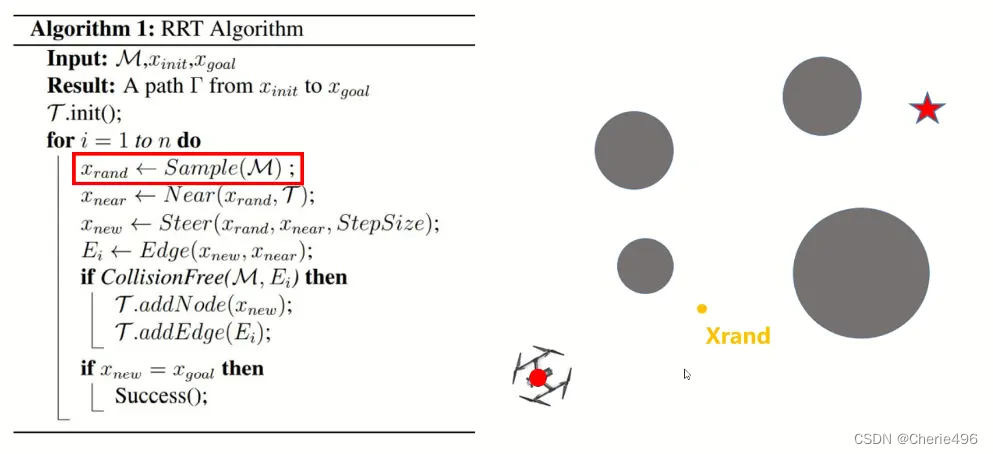
起始点为左下角,先进行一次随机采样,如图中黄点 Xrand,将红点(起点)与 Xrand 连接后,选择一定长度定为下一个点:

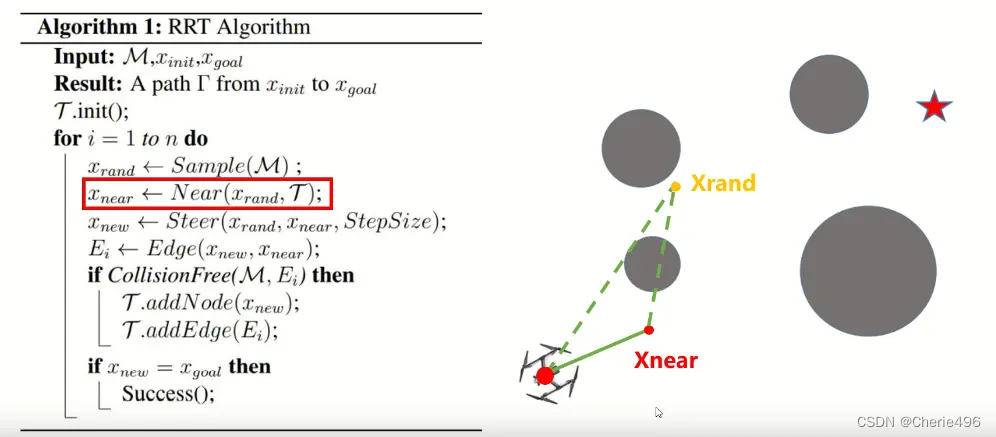
优先考虑距离采样点最近的 “树” 中的点 Xnear 作为与他的连接点,如果连线遇到障碍物则本次采样无效:
以此类推,随着采样的进行,会越来越靠近终点: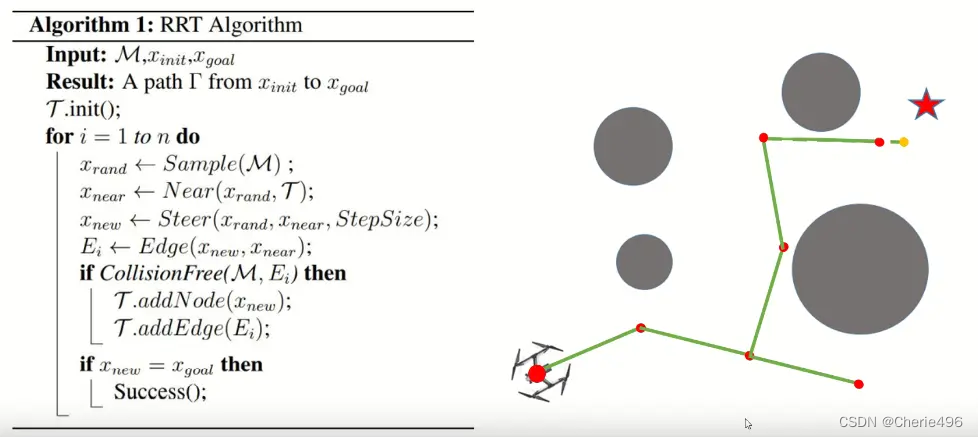
当然,如果最终 Xnew 也就是新长出来的结点想要直接和终点重合是概率很小的,我们每次在循环过程中对新结点 Xnew 和终点 Xgoal 进行步长的判断,如果距离小于步长并且没有障碍物,我们就将 Xnew 和终点直接连起来:

可以看到,RRT 算法规划出来的路径并不一定是最优路径,甚至可以说比较糟糕,考虑的优化策略有,以一定概率设置终点为 Xrand,直接连线 Xnear 和 Xrand 这样也许能规划一条笔直到达终点的路径(如果中途没有障碍物的话)
RRT 的代码实现里的一些总结:
判断障碍物与路径是否碰撞,在此例的简单模型中可以直接以障碍物圆心到直线距离判断,是否小于障碍物半径;
随机采样是以角度 + 长度选定的,如图:
高斯过程回归
高斯过程(Gaussian Process, GP)是随机过程之一,是一系列符合正态分布的随机变量在一指数集(index set)内的集合
我认为该解释中的“指数”可以理解为“维度“,按照机器学习的角度,各个指数上的随机变量可以对应地理解为各个维度上的特征。
对于一个高斯过程:
![]()
设随机变量![]() ,其中 n 对应上文中的维数,
,其中 n 对应上文中的维数, ![]() 即对应各维度上的特征样本。
即对应各维度上的特征样本。![]() 符合高维正态分布,
符合高维正态分布, ![]() 为均值向量, 是这 个特征之间的协方差矩阵,将 展开有:
为均值向量, 是这 个特征之间的协方差矩阵,将 展开有:
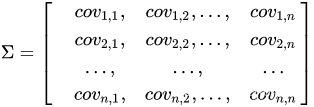
其中 ![]() 表示特征 i 和特征 j 之间的协方差(covariance)。
表示特征 i 和特征 j 之间的协方差(covariance)。
高斯过程样本与一般机器学习的样本区别在于,高斯过程中样本各特征之间存在相关关系,这种相关关系是通过协方差矩阵 来体现的。比如在一些时间序列模型里面,各个变量输出的时间序列在时间前后都会体现出一种相关性(比如平滑过渡等),这种模型输出就很适合使用高斯过程来模拟。
高斯过程回归(Gaussian Process Regression, GPR)是使用高斯过程(Gaussian Process, GP)先验对数据进行回归分析的非参数模型(non-parameteric model)
其中,回归分析法指利用数据统计原理,对大量统计数据进行数学处理,并确定因变量与某些自变量的相关关系,建立一个相关性较好的回归方程(函数表达式)我的理解就是类似离散点拟合成直线?能透过自变量的变化确定因变量的变化。
关于其中的先验和后验,看到一个很有意思的例子分享如下:
老王要去10公里外的一个地方办事,他可以选择走路,骑自行车或者开车,并花费了一定时间到达目的地。在这个事件中,可以把交通方式(走路、骑车或开车)认为是原因,花费的时间认为是结果。
若老王花了一个小时的时间完成了10公里的距离,那么很大可能是骑车过去的,当然也有较小可能老王是个健身达人跑步过去的,或者开车过去但是堵车很严重。若老王一共用了两个小时的时间完成了10公里的距离,那么很有可能他是走路过去的。若老王只用了二十分钟,那么很有可能是开车。这种先知道结果,然后由结果估计原因的概率分布,p(交通方式|时间),就是后验概率。
老王早上起床的时候觉得精神不错,想锻炼下身体,决定跑步过去;也可能老王想做个文艺青年试试最近流行的共享单车,决定骑车过去;也可能老王想炫个富,决定开车过去。老王的选择与到达目的地的时间无关。先于结果,确定原因的概率分布,p(交通方式),就是先验概率。
老王决定步行过去,那么很大可能10公里的距离大约需要两个小时;较小可能是老王平时坚持锻炼,跑步过去用了一个小时;更小可能是老王是个猛人,40分钟就到了。老王决定骑车过去,很可能一个小时就能到;较小可能是老王那天精神不错加上单双号限行交通很通畅,40分钟就到了;还有一种较小可能是老王运气很差,连着坏了好几辆共享单车,花了一个半小时才到。老王决定开车过去,很大可能是20分钟就到了,较小可能是那天堵车很严重,磨磨唧唧花了一个小时才到。这种先确定原因,根据原因来估计结果的概率分布,p(时间|交通方式),就是似然估计。
回到高斯过程回归,当我们在某些指数上获得了一批观测样本后,这批观测样本将有助于我们对其他指数集上的样本分布进行估计(后验)。我们将这批已观测指数集设为 ![]() ,未观测到的指数集设为
,未观测到的指数集设为![]() 。接下来便可使用方法获得在
。接下来便可使用方法获得在![]() 上样本分布后验概率参数和
上样本分布后验概率参数和 ![]() ,最后重新对
,最后重新对![]() 上的随机变量进行采样。
上的随机变量进行采样。
论文的优点:在路径规划前对全局地图进行平面分析非常耗时,文章中考虑在 RRT 算法生成树的时候再进行分析,避免一些不必要点的分析来节省时间。
具体流程:激光雷达探测到周围的地形并返回点云。然后,SLAM 模块基于点云构建一个全局地图。接下来,将全局映射导入到全局规划模块,该模块使用 PF-RRT * 算法生成 RRT 树和稀疏全局路径。在基于 GPR 的插值后,导入一个密集的全局路径添加到基于 NMPC 规划器的本地规划模块。本地规划器向机器人生成控制率,控制机器人的下一步动作。
考虑的点:考虑通过性时,文章中主要从三个点考虑,坡度,平整度和稀疏度。在进行采样时,所选取的每个点为中心,边长为 ls 的正方体区域内的点作平面拟合,考虑上述的三个指标是否符合要求。保证定步长的两个节点之间可通行性符合要求即可。
文中的线性插值:所谓线性插值好像并没有想的特别难,查询了一些资料发现,所谓线性插值就是根据两个点去估计某个点的数值,即平面上有(X,Y)和(M,N)两个点时,连成直线后就可以根据横坐标估计其他点的纵坐标,或者估计点的分布。科学地来说线性插值是指插值函数为一次多项式的插值方式,其在插值节点上的插值误差为零。线性插值相比其他插值方式,如抛物线插值,具有简单、方便的特点。线性插值的几何意义即为利用过 A 点和 B 点的直线来近似表示原函数。线性插值可以用来近似代替原函数,也可以用来计算得到查表过程中表中没有的数值。如图:















 5434
5434











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









