







 本文探讨了kitti数据集中激光雷达和毫米波雷达的区别。激光雷达精度高,稳定性强,但易受恶劣天气影响,而毫米波雷达则具有精准度高、抗干扰能力强、全天候工作等优点,适用于汽车防撞领域。
本文探讨了kitti数据集中激光雷达和毫米波雷达的区别。激光雷达精度高,稳定性强,但易受恶劣天气影响,而毫米波雷达则具有精准度高、抗干扰能力强、全天候工作等优点,适用于汽车防撞领域。
kitti数据集
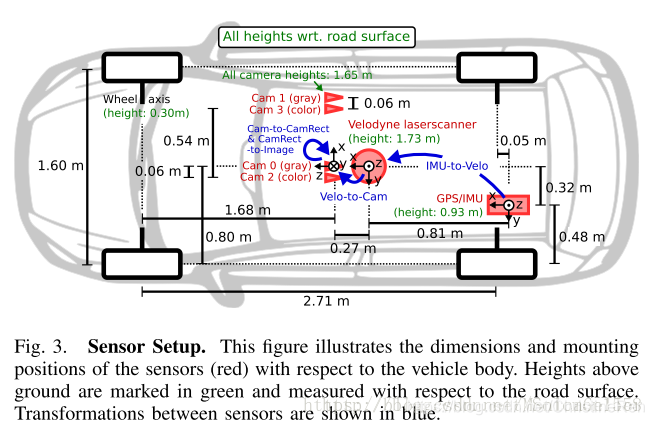
kitti的数据采集平台,配置有四个摄像机和一个激光雷达,四个摄像机中有两个灰度摄像机,两个彩色摄像机。
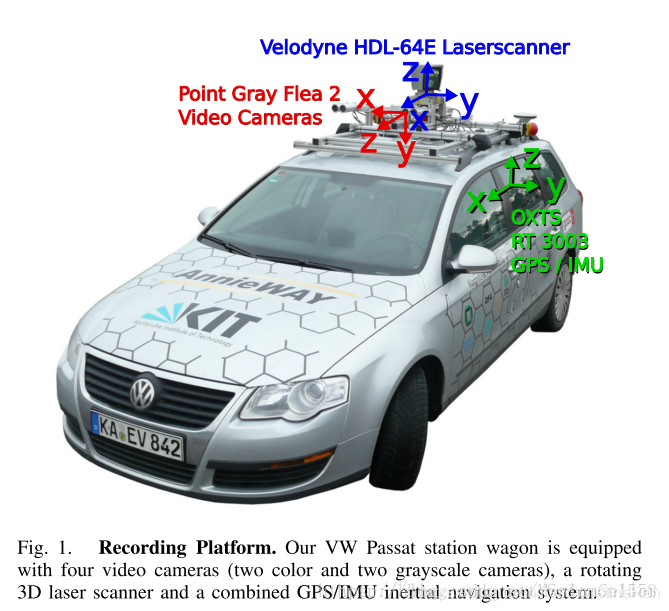
从图中可看出,关于相机坐标系(camera)的方向与雷达坐标系(velodyne)的方向规定:
camera: x = right, y = down, z = forward
velodyne: x = forward, y = left, z = up
那么velodyne所采集到的点云数据中,各点的x轴坐标,即为所需的深度depth信息。
自动驾驶中,车辆一般安装有4个超大广角鱼眼相机和多个毫米波雷达.
AVM相机获取的是鱼眼图像.
激光雷达和毫米波雷达的区别:
毫米波雷达
LIDAR是一种集激光,全球定位系统(GPS)和惯性导航系统(INS)三种技术与一身的系统,用于获得数据并生成精确的DEM。这三种技术的结合,可以高度准确地定位激光束打在物体上的光斑。
它又分为目前日臻成熟的用于获得地面数字高程模型(DEM)的地形LIDAR系统和已经成熟应用的用于获得水下DEM的水文LIDAR系统&
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 638
638

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









