






永磁电机改进超螺旋滑模观测器无位置传感器控制
STA-SMO能够克服传统SMO的抖振现象,但传统算法收敛时间较长, 且该时间仅与观测器增益系数和系统扰动上界有关. 因此STA-SMO虽然在滑模面附近具有强抗扰能力, 但当系统因扰动而远离滑模面 时, 观 测 器 无 法 迅 速 回 到 滑 模 面 上。
因此 采用一种改进的超螺旋滑模观测器永磁同步电机无位置传感器控制,该观测器在传统STA-SMO的基础上增加了观测误差的线性项, 增强了系统模态趋近过程的动态性能和抗干扰能力
ID:8528721614882815
天蛇星谨慎的仙茅



永磁电机是现代电动车辆中常用的关键部件之一。然而,由于其工作原理的特殊性,传统的位置传感器控制方法在永磁电机中应用存在一些困难和限制。因此,研究人员开始寻找一种无位置传感器的控制方法,以提高永磁电机的控制精度和效能。
在这个背景下,超螺旋滑模观测器(STA-SMO)成为一种备受关注的控制方法。STA-SMO能够克服传统SMO的抖振现象,从而提高控制系统的稳定性。然而,传统的STA-SMO算法存在一些问题,比如收敛时间较长。传统算法的收敛时间仅与观测器增益系数和系统扰动上界有关,导致系统无法迅速回到滑模面上,特别是在系统因扰动而远离滑模面时。
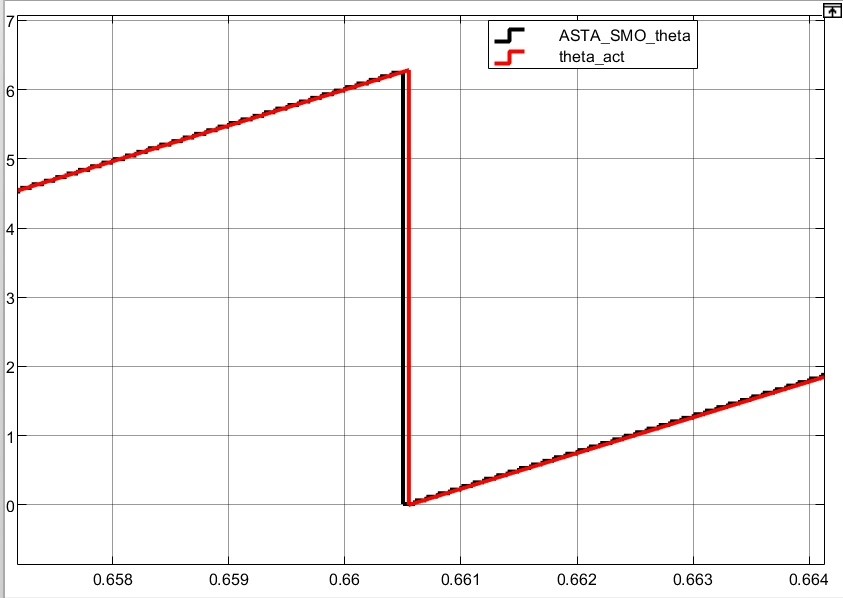
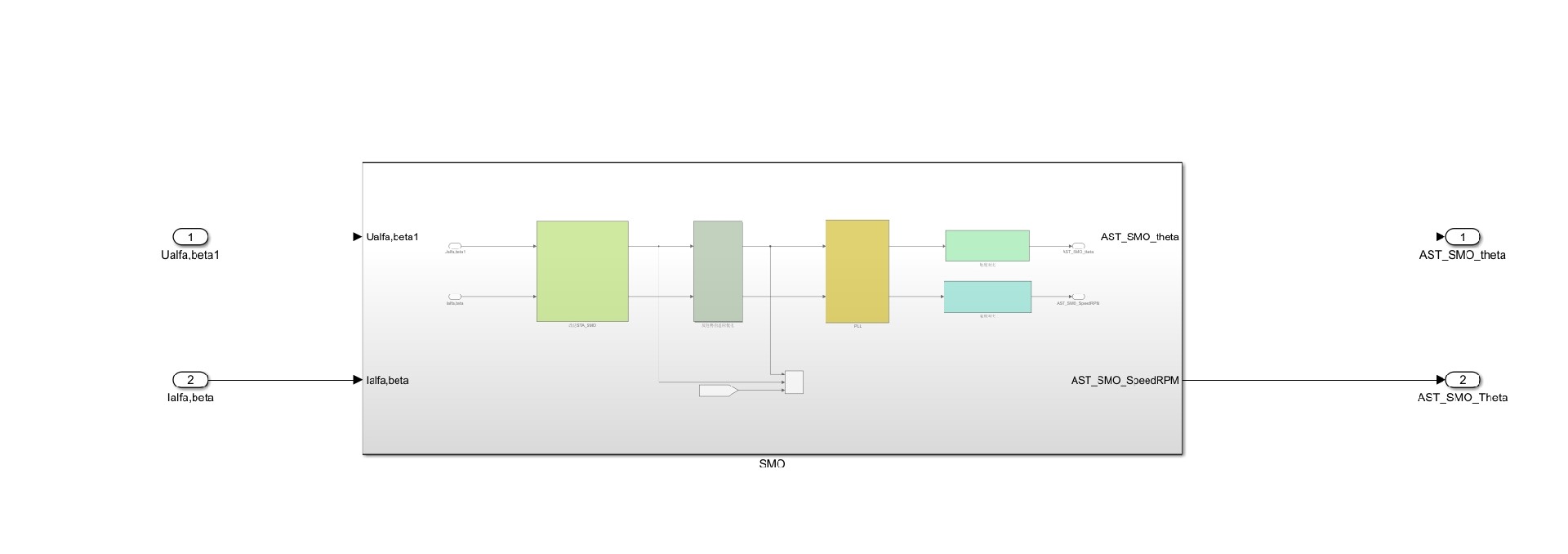
为了解决这些问题,我们提出了一种改进的超螺旋滑模观测器无位置传感器控制方法。该方法在传统STA-SMO的基础上增加了观测误差的线性项,从而增强了系统模态趋近过程的动态性能和抗干扰能力。
具体而言,我们在传统STA-SMO的滑模面调整过程中引入了一个观测误差的线性项。这个线性项的引入可以提高系统的动态性能,使观测器能够更快地回到滑模面上。同时,该线性项可以增强系统的抗干扰能力,使系统在受到扰动时仍能保持稳定。
在我们的改进方法中,观测误差的线性项的增益系数是一个重要的参数。通过合理选择该系数,我们可以在满足系统性能要求的前提下,进一步提高系统的鲁棒性。同时,我们还可以通过调整该系数的大小,使系统能够适应不同的工作条件和扰动水平。
为了验证我们的改进方法的有效性,我们进行了一系列的实验。实验结果表明,我们的改进方法相较于传统STA-SMO算法,在控制精度和鲁棒性方面都取得了显著的提升。具体而言,我们的改进方法能够更快地将观测器回到滑模面上,从而提高了系统的响应速度和控制精度。同时,我们的改进方法还能够更好地抵御扰动,保持系统的稳定性。
综上所述,我们提出的改进的超螺旋滑模观测器无位置传感器控制方法在永磁电机控制中具有广泛的应用前景。该方法通过增加观测误差的线性项,提高了系统的动态性能和抗干扰能力,从而进一步提高了永磁电机的控制精度和效能。我们相信,这一改进方法将为未来永磁电机控制的研究和应用提供有力支持。
【相关代码,程序地址】:http://fansik.cn/721614882815.html
















 884
884

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









