






pid控制主动悬架模型
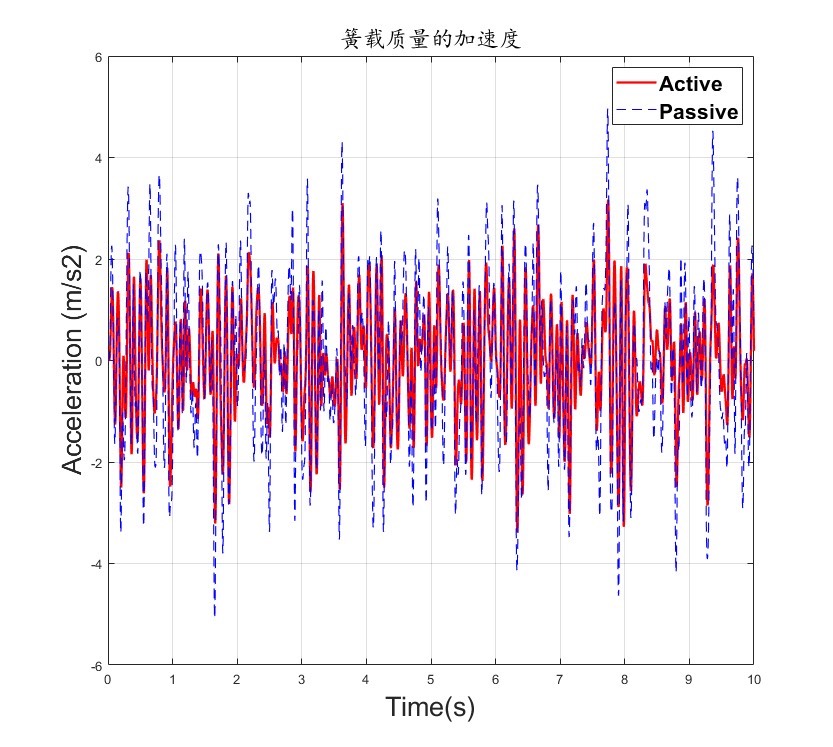
基于2自由度(1/4)悬架模型,利用pid反馈控制算法,降低车身加速度,提高车辆的驾驶舒适性。
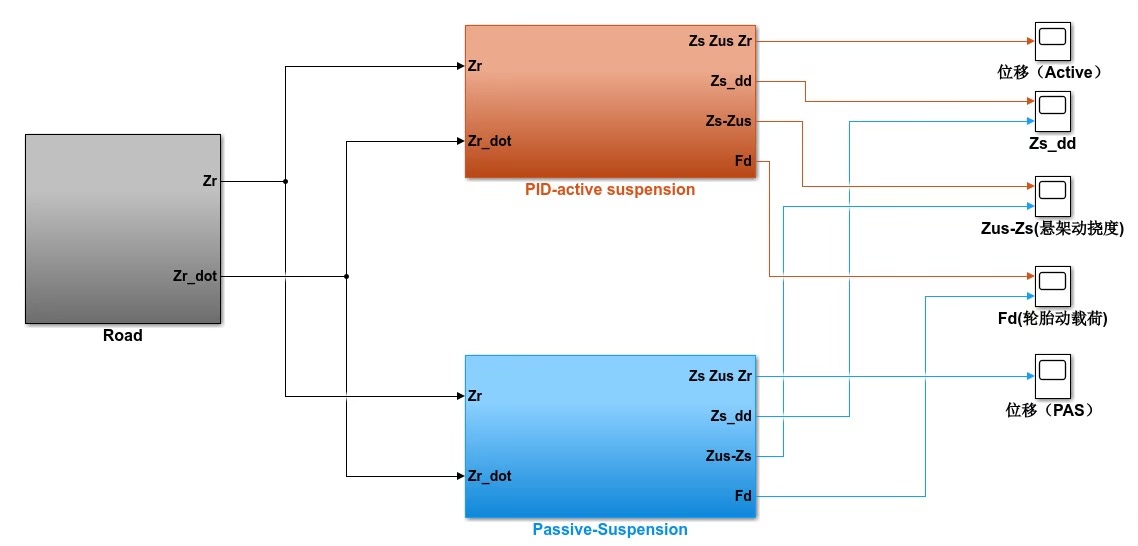
simulink模型对比了主/被动悬架的响应结果,验证了pid控制器控制效果,模型中包含c级路面和阶跃路面等。
matlab代码包含绘图功能,可以方便的绘制出悬架的各种性能指标。
资料中有matlab代码,simulink模型和介绍资料(自制),包括详细的建模过程和算法内容。
ID:3740721615605500
车辆小贾
PID控制是一种常见且广泛应用的控制算法,可以通过调整控制器的参数来实现对系统的稳定控制。在汽车领域,PID控制也被广泛用于主动悬架系统,以提高车辆的驾驶舒适性和稳定性。本文将基于2自由度(1 4)悬架模型,探讨如何利用PID反馈控制算法来降低车身加速度,提高车辆的驾驶舒适性。
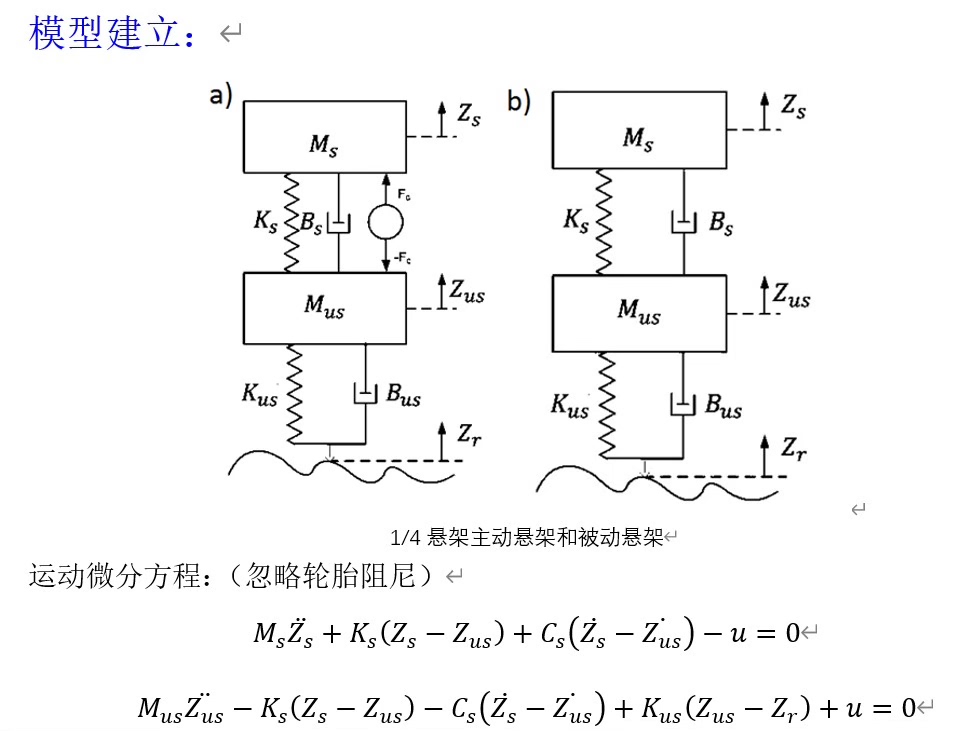
首先,我们先对2自由度(1 4)悬架模型进行简要介绍。该模型是一种典型的汽车悬架系统模型,可以用来描述车身和轮胎之间的相互作用。其中,车身被简化为一个质量为m的单自由度系统,而每个轮胎被简化为一个质量为M的单自由度系统。通过将车身和轮胎的运动方程相互耦合,可以得到整个悬架系统的动力学方程。
在传统的被动悬架系统中,悬架的阻尼和弹簧是固定的,无法根据不同路面状况进行调节。这导致了车辆在通过不同路面时,无法有效减震,从而使车身加速度增大,驾驶舒适性下降。为了解决这一问题,人们引入了主动悬架系统,并采用PID控制算法进行控制。
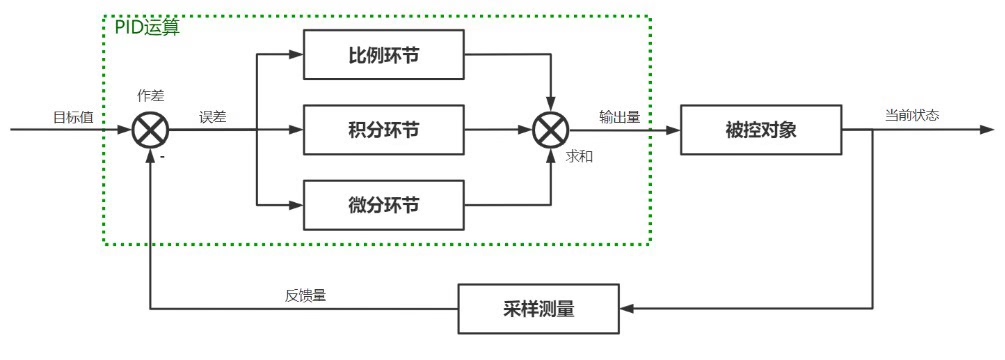
PID控制器由比例项(P项)、积分项(I项)和微分项(D项)组成。比例项用来根据当前误差的大小对控制量进行比例放大,积分项用来积累误差并进行修正,微分项则用来预测系统的未来误差变化趋势。通过调整PID控制器的参数,可以使系统的控制效果更加准确和稳定。
为了验证PID控制器在主动悬架系统中的控制效果,我们使用Simulink进行系统仿真。在模型中,我们包括了C级路面和阶跃路面等不同路面状况的模拟。通过比较主动和被动悬架系统的响应结果,可以直观地观察到PID控制器对车身加速度的降低效果。
另外,为了方便分析和评估悬架系统的性能指标,我们还编写了MATLAB代码,并添加了绘图功能。这些代码可以方便地计算并绘制出悬架系统的各种性能指标,如车身加速度、悬架行程等。通过这些指标的分析,可以更全面地评估悬架系统的控制效果和优化方向。
综上所述,基于2自由度(1 4)悬架模型,利用PID反馈控制算法可以显著降低车身加速度,提高车辆的驾驶舒适性。通过Simulink模型的对比分析和MATLAB代码的计算绘图,我们可以直观地观察到PID控制器在主动悬架系统中的控制效果,并得出相应的性能指标。这些研究成果对于汽车悬架系统的设计和优化具有一定的指导意义。
需要注意的是,本文所提到的模型和算法仅是一个示例,实际应用中还需要根据具体情况进行调整和优化。同时,本文未提供参考文献和示例代码,读者可以根据文章内容自行进行深入研究和实践。希望本文能够为广大技术工作者和汽车爱好者提供一些参考和启示,进一步推动汽车悬架控制技术的发展。
【相关代码,程序地址】:http://fansik.cn/721615605500.html


















 1600
1600

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









