







Dijkstra算法简介:
Dijkstra算法是由荷兰计算机科学家Edsger Wybe Dijkstra于1959年提出的一种解决有向加权图中单源最短路问题的算法,其中要求加权图中不可有负权边。
Dijkstra算法步骤演示:
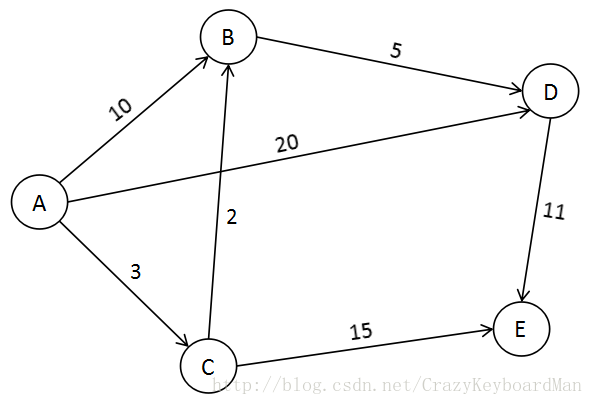
- 以如下的一张有向正权图G为例,规定:
- 起点为A
- 向量 xy→表示从顶点x到顶点y的有向边
-
向量的模∣∣xy→∣∣表示有向边xy→的权值
- 初始状态:
设起点到各点当前最短距离为 Lk(k=A,B,C,D,E),则有:
LA=0
并设此时
LB至LE=+∞
则可列表:
| LA | LB | LC | LD | LE | |
|---|---|---|---|---|---|
| 初始状态 | 0 | +∞ | +∞ | +∞ | +∞ |
- 第一次迭代:
从起点A点出发,更新起点到A的邻居(B、C、D)的当前最短距离( Lk )。此时:
对B:
LB=∣∣∣AB→∣∣∣=10对C:
LC=∣∣∣AC→∣∣∣=3对D:
LD=∣∣∣AD→∣∣∣=20
则可列表:
| LA | LB | LC | LD | LE | |
|---|---|---|---|---|---|
| 第一次迭代后 | 0 | 10 | 3 | 20 | +∞ |
- 第二次迭代:
找出第一次迭代后除已处理过的起点A外, Lk 最小的点:C
从C出发,更新C邻居(B、E)的 Lk 值,此时:
对B:
经过C到达B的路径长度:
L=LC+∣∣∣CB→∣∣∣=5∵LB=10>L∴更新LB=L=LC+∣∣∣CB→∣∣∣=5
对E:
经过C到达E的路径长度:
L=LC+∣∣∣CE→∣∣∣=18∵LE=+∞>L∴更新LE=L=LC+∣∣∣CE→∣∣∣=18
则可列表:
| LA | LB | LC | LD | LE | |
|---|---|---|---|---|---|
| 第二次迭代后 | 0 | 5 | 3 | 20 | 18 |
- 第三次迭代::
找出第二次迭代后,除已处理过的A、C两点外, Lk 最小的点:B
从B出发,更新B邻居(D)的 Lk 值,此时:
对D:
经过B到达D的路径长度:
L=LB+∣∣∣BD→∣∣∣=10∵LD=20>L∴更新LD=L=LB+∣∣∣BD→∣∣∣=10
则可列表:
| LA | LB | LC | LD | LE | |
|---|---|---|---|---|---|
| 第三次迭代后 | 0 | 5 | 3 | 10 | 18 |
- 第四次迭代:
找出第三次迭代后,除已处理过的A、B、C三点外, Lk 最小的点:D
从D出发,更新D邻居(E)的 Lk 值,此时:
对E:
经过D到E的路径长度:
L=LD+∣∣∣DE→∣∣∣=21∵LE=18<L∴不必更新,LE=18
则可列表:
| LA | LB | LC | LD | LE | |
|---|---|---|---|---|---|
| 第四次迭代后 | 0 | 5 | 3 | 10 | 18 |
- 第五次迭代:
找出第四次迭代后,除已处理过的A、B、C、D四点外, Lk 最小的点:E
此时,E没有邻居,因此对E的处理直接结束
则可列表:
| LA | LB | LC | LD | LE | |
|---|---|---|---|---|---|
| 第五次迭代后 | 0 | 5 | 3 | 10 | 18 |
- 五次迭代后,有向图G中所有的点都被处理过,算法终止,则整个迭代过程列表如下:
| LA | LB | LC | LD | LE | |
|---|---|---|---|---|---|
| 初始状态 | 0 | +∞ | +∞ | +∞ | +∞ |
| 第一次迭代后 | 0 | 10 | 3 | 20 | +∞ |
| 第二次迭代后 | 0 | 5 | 3 | 20 | 18 |
| 第三次迭代后 | 0 | 5 | 3 | 10 | 18 |
| 第四次迭代后 | 0 | 5 | 3 | 10 | 18 |
| 第五次迭代后 | 0 | 5 | 3 | 10 | 18 |
不难观察到,Dijkstra算法的特点主要是从起点开始,“由近及远,层层扩展”,越靠前处理的点离起点越近,最后一个处理的点一定离起点最远。
所以,依据算法每找到一个顶点后,该顶点对应的
Lk
值就是起点到该点的最短路径长度,且
Lk
在这之后不会被更改。
而最后一次迭代得到的所有
Lk
的值,就是由起点(亦称源点)A到各点的最短路径长度。
故Dijkstra算法解决的是有向图中的单源最短路问题。
算法概括:
步骤概括:
- 第一个核心步骤:找到当前未处理过的顶点中 Lk 最小的点 V ,(由于起点到起点的消耗为0,所以算法开始时V必定代表起点);
- 第二个核心步骤:若V有邻居,则计算经过V的情况下起点到达各邻居的消耗
L ,并选择是否更新 V 邻居的Lk 值。若没有邻居则对该点的处理结束 - 重复以上两个核心步骤,直到满足算法终止的条件:有向图中所有的点都被处理过。
流程图:
数学描述及证明
- Dijkstra算法的数学描述:
设全集 U :有向图中所有的点的集合。
设点集S :已经找到最短路径的点的集合,初始状态下设仅有 起点∈S 。
设点集 Q :还未找到最短路径的点的集合,显然Q=U−S 。
设 Lk 为当前情况下,起点经过 S 中若干点到点k 的最短距离( k∈U ),初始 L起点=0 ,其他均为 +∞ 。
算法开始:
- 从起点开始,沿某条弧(设权值为 arcs )找到起点的一个邻居 n
- 令
Ln=min{Ln,L起点+arcs} - 按此方式更新起点所有邻居
- 在集合
Q
中找到
Lk 最小的点 v ,则Lv 即起点到 v 的最短路径长度 - 将点
v 从 Q 中取出加入S ,对点 v 重复上述所有操作 - 如此重复,直到
S=U ,即 Q=∅ 时,算法结束, Lk 即为从起点到各点的最短路径长度
提醒:这里读者一定要反复仔细体会 Lk 的含义,它不断更新的过程正是Dijkstra算法“由近及远,层层扩展”特点的体现。同时思考一下之前提过的“找到一个点后,该点 Lk 值肯定不会被更改”的原因(理解 Lk 的含义后,原因其实是显而易见的)。
Dijkstra算法的数学证明:
由算法的数学描述,可知:
只有命题:“每次从 Q 集中找到Lk 最小的点 v ,Lv 即为从起点到 v 的最短路径长度”正确时,算法正确。
可用广义数学归纳法证明,设起点为o :- 证明:算法找到的第一个点为
v1
,
Lv1
即为从起点到
v1
的最短路径长度。
用反证法:
∵算法找到的第一个点一定是起点o最近的邻居
假设Lv1不是从起点到v1的最短路径长度
则∃点v,使得∣∣ov→∣∣<∣∣ov1→∣∣,与已知矛盾
故假设不成立,子命题得证 - 证明:已用算法从
Q
中依次找到了
v1,v2,⋯,vk 共 k 个点,且Lv1,Lv2,⋯,Lk 是起点到各点的最短路径长度,则此时从 Q 中依照算法再找一个点vk+1 , Lk+1 即为起点到 vk+1 的最短路径长度。
用反证法:
假设Lk+1不是起点到vk+1最短路径的长度
所以设起点到vk+1的最短路径经过的点的集合为V,路径长度为L,则有L<Lk+1
∵由Lk的含义⇒V∩Q≠∅
又∵o∈V且o∈S⇒V∩S≠∅
则设到vk+1的最短路径中,最靠近vk+1且不属于S的点为vx,vx的后继为vy
∵有向图中边均为正权边
∴必有Lvx<Lvy⩽L,vy为vk+1时等号成立
又∵vx∉S⇒Lvx>Lk+1,产生矛盾
故假设不成立,子命题得证
综上所述,该命题得证,故算法正确。
- 证明:算法找到的第一个点为
v1
,
Lv1
即为从起点到
v1
的最短路径长度。
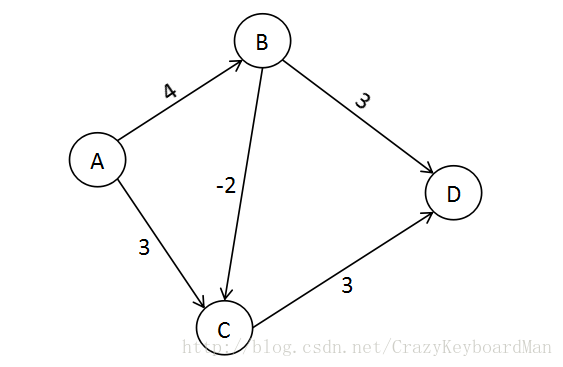
关于负权边
Dijkstra算法要求有向图中不得有负权边,如果图中有负权边,则在之前的证明过程中:
故此时算法正确性不得证。
这里举一个简单的例子供读者自行对照理解:
时间复杂度
设有向图中,共有
V
个顶点,
传统Dijkstra算法中主要操作有:
- 每次从
Q
集中找到
Lk 最小的点,最坏情况下需:
(V−1),(V−2),⋯,1
次操作。
所以整个算法过程共需:
(V−1)+(V−2)+⋯+1=(v−1)v2=V22−12
次操作。 - 计算并更新各点邻居的
Lk
值,实质上是将所有的边遍历一遍,故需
E
次操作。
则用大O 表示法:
O(V22−12+E)⇔O(n2)
故传统Dijkstra算法的时间复杂度为 O(n2)
Dijkstra算法的优化
在上述对于传统Dijkstra算法的时间复杂度分析中,我们可知,(尤其是稀疏图中)从
Q
集中找到
因此对于顶点的有效排序可以大大地提高算法的性能,常用的方法有:小顶堆或优先队列:
- 小顶堆优化中,我们初始将所有顶点设置为一个小顶堆,此时堆顶一定为起点,而在每一次迭代中,我们将堆顶元素取出(复杂度
O(1)
),而后调整小顶堆(复杂度
O(logn)
),这样调整
V
次,直到堆中所有顶点全部加入
S 。则整个算法的时间复杂度将从 O(n2) 优化为 O(nlogn) 。 - 优先队列优化中,建立一个最小优先的优先级队列,队列中保存顶点和当前 Lk 值的二元组,初始将起点二元组入队,每当某个顶点的 Lk 值被更新,则将这个新的顶点二元组入队,每次迭代时,将队首元素取出并出队,直到队列为空。由于优先队列一般采用堆实现,故维护优先队列的复杂度同为 O(logn) ,则整个算法的时间复杂度同被优化为 O(nlogn) 。
注意:优先队列优化中,新的顶点二元组入队时,旧的二元组依然在优先队列中,因此每次出队的元素可能会有杂音,如何识别并去除这些杂音是这种优化方式需要考虑的。
关于无向图
事实上,Dijkstra算法同样可以处理无向图中的单源最短路问题(无向图其实可看做一种特殊的有向图),但在这种情况下,要对算法做一些修改:标记已经访问过的边,在寻找邻居时不沿已标记过的边寻找。
关于空间复杂度
Dijkstra算法的空间复杂度视具体实现方法而定,采用邻接矩阵的存图方式的空间复杂度为 O(n2) ,然而在稀疏图中,这种存储方式将有大量的空间浪费,因此推荐使用邻接表和有关标志数组存图。
算法具体代码实现多种多样,留作读者自行思考,在此不再赘述。
绝对原创,转载请注明出处。
才疏学浅,如有错误,望不吝赐教

















 2888
2888

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









