







前言
此篇我们即将编写一个简单的服务(service)通信例子,客户端节点向服务端节点发出请求(.srv文件中规定了通信的数据结构格式),服务端节点收到请求后将结果回复给客户端节点,一问一答,简单明了。
例子中,我们实现求和的服务内容,客户端发出请求数据(两个int数),服务端将这俩数相加后将求和的结果回复给客户端。
动动手
创建一个功能包
老步骤,打开一个终端,激活ROS 2安装环境,再进入工作空间根路径下的src目录,执行下面命令生成我们今天的服务功能包cpp_srvcli:
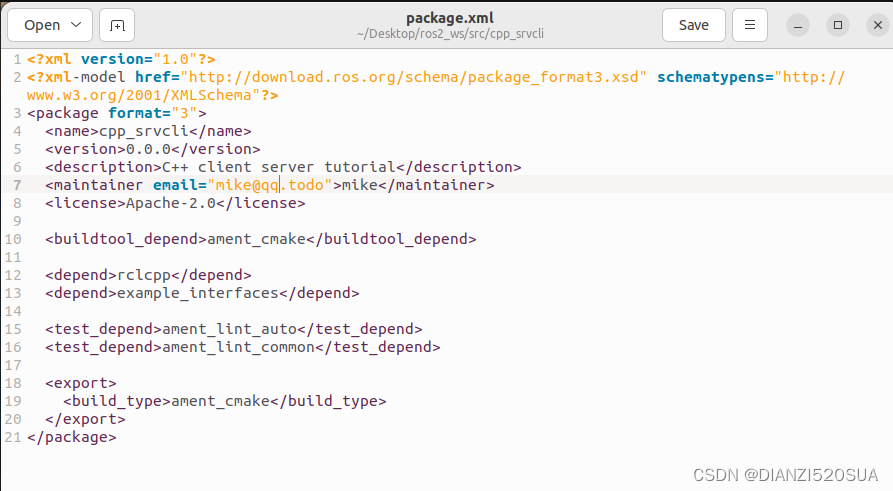
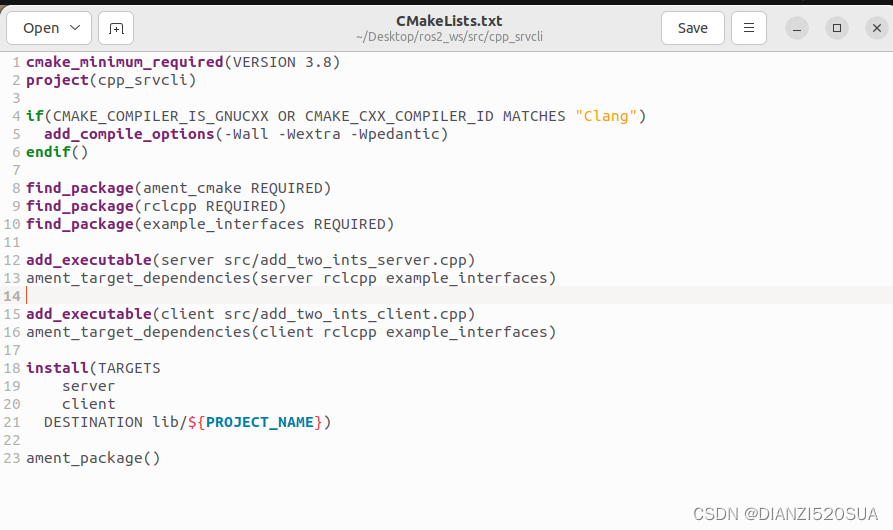
$ros2 pkg create --build-type ament_cmake --license Apache-2.0 cpp_srvcli --dependencies rclcpp example_interfaces上面的命令与上一篇主题(topic)的有些不一样,多了--dependencies rclcpp example_interfaces,--dependencies会将依赖项rclcpp和example_interfaces自动补充到package.xml和CMakeLists.txt中去,我们可以打开这俩文件看看:
package.xml(手动更新了description、maintainer字段)
CMakeLists.txt
 example_interfaces也是一个功能包(ROS 2提供的),它包含了我们在服务通信过程中需要用到的.srv文件(定义了通信的数据结构格式),.srv文件的内容可能像下面这样:
example_interfaces也是一个功能包(ROS 2提供的),它包含了我们在服务通信过程中需要用到的.srv文件(定义了通信的数据结构格式),.srv文件的内容可能像下面这样:
int64 a
int64 b
---
int64 sum三道杠的上面为客户端的请求数据(通信时会填充具体的两个值),三道杠下面是服务端利用请求数据运算得到的结果值,会将其回复给客户端。
编写服务端节点
进入ros2_ws/src/cpp_srvcli/src路径,新建add_two_ints_server.cpp,将下面的代码复制到里面:
#include "rclcpp/rclcpp.hpp"
#include "example_interfaces/srv/add_two_ints.hpp"
#include <memory>
void add(const std::shared_ptr<example_interfaces::srv::AddTwoInts::Request> request,
std::shared_ptr<example_interfaces::srv::AddTwoInts::Response> response)
{
response->sum = request->a + request->b;
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "Incoming request\na: %ld" " b: %ld",
request->a, request->b);
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "sending back response: [%ld]", (long int)response->sum);
}
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
std::shared_ptr<rclcpp::Node> node = rclcpp::Node::make_shared("add_two_ints_server");
rclcpp::Service<example_interfaces::srv::AddTwoInts>::SharedPtr service =
node->create_service<example_interfaces::srv::AddTwoInts>("add_two_ints", &add);
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "Ready to add two ints.");
rclcpp::spin(node);
rclcpp::shutdown();
}分析代码
void add(const std::shared_ptr<example_interfaces::srv::AddTwoInts::Request> request,
std::shared_ptr<example_interfaces::srv::AddTwoInts::Response> response)
{
response->sum = request->a + request->b;
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "Incoming request\na: %ld" " b: %ld",
request->a, request->b);
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "sending back response: [%ld]", (long int)response->sum);
}add函数有两个参数,其一为请求数据的指针request(由客户端发过来),其二为回复数据指针response,会发送给客户端。函数体内,会将请求数据相加的结果赋值给回复数据,另外向控制台(终端)打印出相关的一些信息。
rclcpp::init(argc, argv);初始化ROS 2 C++库,
std::shared_ptr<rclcpp::Node> node = rclcpp::Node::make_shared("add_two_ints_server");创建一个名为add_two_ints_server的节点,用来作服务端,
rclcpp::Service<example_interfaces::srv::AddTwoInts>::SharedPtr service =
node->create_service<example_interfaces::srv::AddTwoInts>("add_two_ints", &add);创建一个名为add_two_ints的服务,当有服务请求的时候自动调用add函数处理服务回复。
添加可执行目标文件信息到CMakeLists.txt
将下面内容添加到CMakeLists.txt中,add_two_ints_server.cpp编译完成后生成的目标文件名称我们定为“server”,另外install宏会使ROS 2能在lib路径下找到目标文件:
add_executable(server src/add_two_ints_server.cpp)
ament_target_dependencies(server rclcpp example_interfaces)
install(TARGETS
server
DESTINATION lib/${PROJECT_NAME})编写客户端节点
同样的,我们在ros2_ws/src/cpp_srvcli/src下,新建一个add_two_ints_client.cpp文件,将下面源代码复制进去:
#include "rclcpp/rclcpp.hpp"
#include "example_interfaces/srv/add_two_ints.hpp"
#include <chrono>
#include <cstdlib>
#include <memory>
using namespace std::chrono_literals;
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
if (argc != 3) {
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "usage: add_two_ints_client X Y");
return 1;
}
std::shared_ptr<rclcpp::Node> node = rclcpp::Node::make_shared("add_two_ints_client");
rclcpp::Client<example_interfaces::srv::AddTwoInts>::SharedPtr client =
node->create_client<example_interfaces::srv::AddTwoInts>("add_two_ints");
auto request = std::make_shared<example_interfaces::srv::AddTwoInts::Request>();
request->a = atoll(argv[1]);
request->b = atoll(argv[2]);
while (!client->wait_for_service(1s)) {
if (!rclcpp::ok()) {
RCLCPP_ERROR(rclcpp::get_logger("rclcpp"), "Interrupted while waiting for the service. Exiting.");
return 0;
}
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "service not available, waiting again...");
}
auto result = client->async_send_request(request);
// Wait for the result.
if (rclcpp::spin_until_future_complete(node, result) ==
rclcpp::FutureReturnCode::SUCCESS)
{
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "Sum: %ld", result.get()->sum);
} else {
RCLCPP_ERROR(rclcpp::get_logger("rclcpp"), "Failed to call service add_two_ints");
}
rclcpp::shutdown();
return 0;
}分析代码
std::shared_ptr<rclcpp::Node> node = rclcpp::Node::make_shared("add_two_ints_client");
rclcpp::Client<example_interfaces::srv::AddTwoInts>::SharedPtr client =
node->create_client<example_interfaces::srv::AddTwoInts>("add_two_ints");创建服务add_two_ints的客户端节点add_two_ints_client,
auto request = std::make_shared<example_interfaces::srv::AddTwoInts::Request>();
request->a = atoll(argv[1]);
request->b = atoll(argv[2]);创建一个请求request,并且将启动客户端节点时传入的两个int数(字符串转长整型)赋值给上面提到的.srv文件里面定义的请求数据变量a和b,
while (!client->wait_for_service(1s)) {
if (!rclcpp::ok()) {
RCLCPP_ERROR(rclcpp::get_logger("rclcpp"), "Interrupted while waiting for the service. Exiting.");
return 0;
}
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "service not available, waiting again...");
}进入while循环寻找网络中的服务节点,如果超过1秒还没有找到,打印出“service not available,waiting again...”,并继续寻找,直到找到服务节点才退出while循环语句,如果你主动通过ctrl + c关闭了客户端节点,打印出“Interrupted while waiting for the service. Exiting.”
auto result = client->async_send_request(request);找到服务节点后发送数据请求(request)给对方,
if (rclcpp::spin_until_future_complete(node, result) ==
rclcpp::FutureReturnCode::SUCCESS)
{
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "Sum: %ld", result.get()->sum);
} else {
RCLCPP_ERROR(rclcpp::get_logger("rclcpp"), "Failed to call service add_two_ints");
}进入spin_until_future_complete函数,等待服务节点的结果回复或者返回失败 。
添加可执行目标文件信息到CMakeLists.txt
同服务端节点的类似,但是这次我们可以只使用一个install宏(上一篇我们lisener和talker各用了一个install宏语句),简练一点,最后结果如下:
构建运行
检查依赖
先回到我们的工作空间根路径下,检查下依赖情况:
$rosdep install -i --from-path src --rosdistro iron -y
构建功能包
依然是在工作空间根路径下,我们来构建cpp_srvcli功能包:
$colcon build --packages-select cpp_srvcli
构建成功之后你可以看看ros2_ws/install/cpp_srvcli/lib/cpp_srvcli下生成了我们的目标文件client和server。

运行server和client
新开两个终端并进入工作空间根路径,分别执行下述命令激活环境变量(underlay和overlay的一起,上一篇有解释不用再分别执行underlay和overlay的):
$source install/setup.bash我们现在一个终端启动服务端节点:
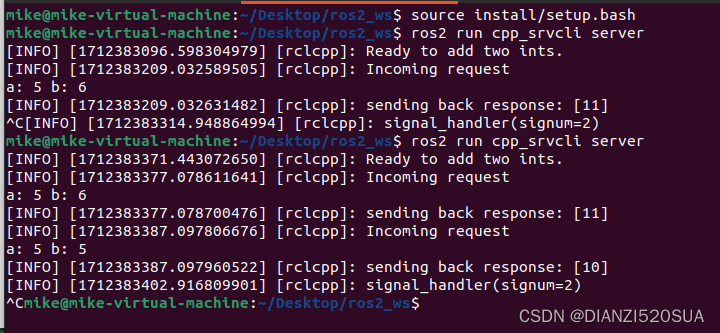
$ros2 run cpp_srvcli server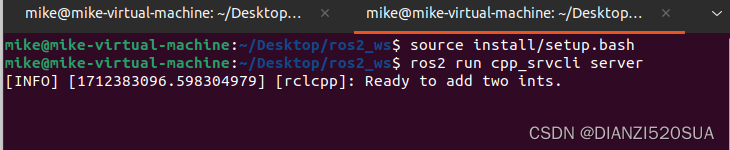
我们在另外一个终端启动客户端节点,但是注意,我们要传入2个参数作为请求数据:
$ros2 run cpp_srvcli client 5 6我们传入了5和6,很快服务端就返回了结果:

服务端的打印如下:
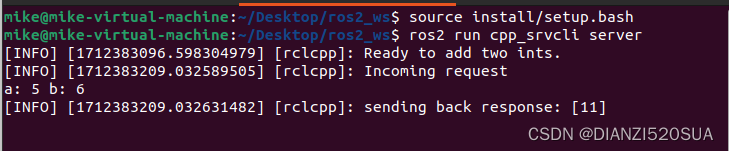
此时客户端收到回复后立即退出运行了,而我们的服务端节点还在等待新的请求,我们再启动一个客户端节点,传入5和5,服务端返回了10,并继续等待新的请求,如果不需要再做什么了我们可以主动关掉服务节点。

 本篇完。
本篇完。














 1161
1161











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









