






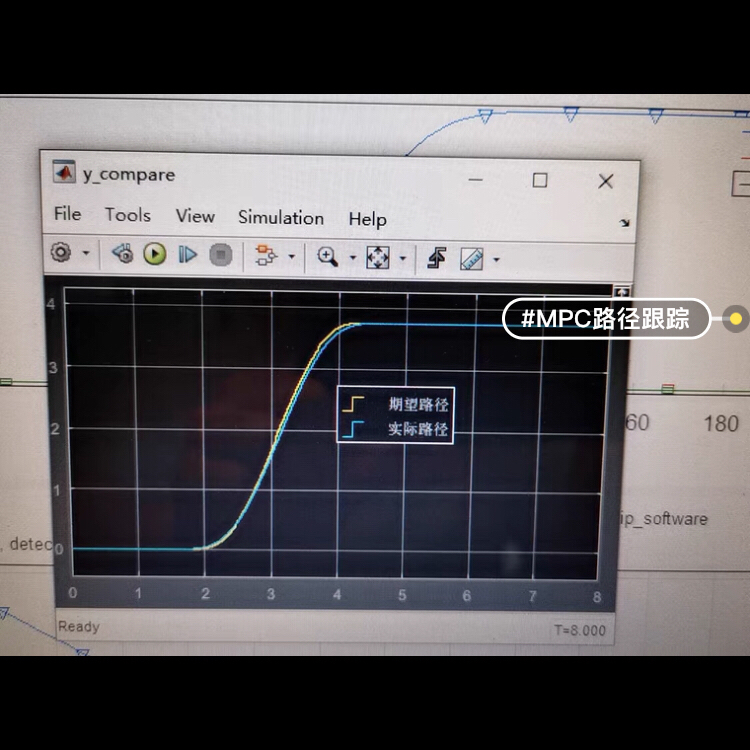
智能车基于五次多项式的智能车横向避幢模型,首先根据工况计算出预碰撞时间,进而计算出最小转向距离,通过MPC预测控制算法来对规划路径进行跟踪控制。
ID:3280675085193208
西葫芦翻出以前
智能车一直是无人驾驶领域的研究热点之一,其中横向避障是保证智能车安全行驶的重要任务之一。本文将基于五次多项式的智能车横向避障模型展开讨论,通过计算预碰撞时间和最小转向距离,利用MPC预测控制算法实现规划路径的跟踪控制。
在智能车的横向避障模型中,五次多项式被广泛应用于路径规划和轨迹跟踪。五次多项式的优势在于它可以通过控制多项式的系数来实现车辆的平滑转弯和加速。通过采用五次多项式模型,智能车可以根据当前的工况灵活地调整车辆的运动轨迹,从而实现避障的目的。
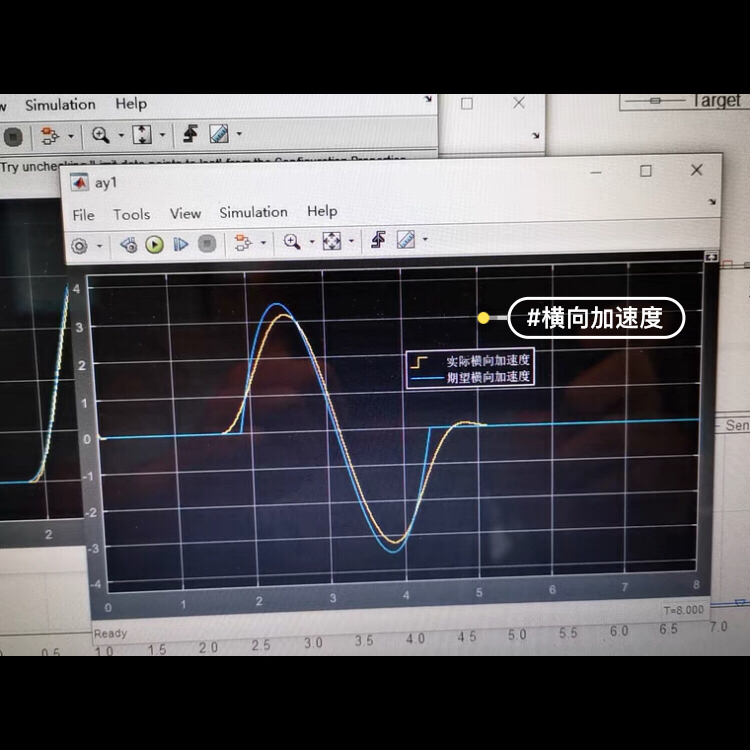
首先,我们需要计算预碰撞时间。预碰撞时间是指智能车与障碍物之间的时间距离,在超过该时间距离后,智能车需要采取相应的措施来避免碰撞。预碰撞时间的计算可以考虑诸多因素,包括车辆自身的速度、加速度,以及障碍物的位置和速度等。通过对这些因素的综合考虑,可以得到准确的预碰撞时间。
接下来,我们需要计算最小转向距离。最小转向距离是智能车为了避免碰撞而必须转弯的最小距离。最小转向距离的计算同样需要综合考虑多个因素,包括车辆的转弯半径、速度,以及障碍物的位置和形状等。通过对这些因素的综合分析,可以得到智能车在避障时必须采取的最小转向距离。
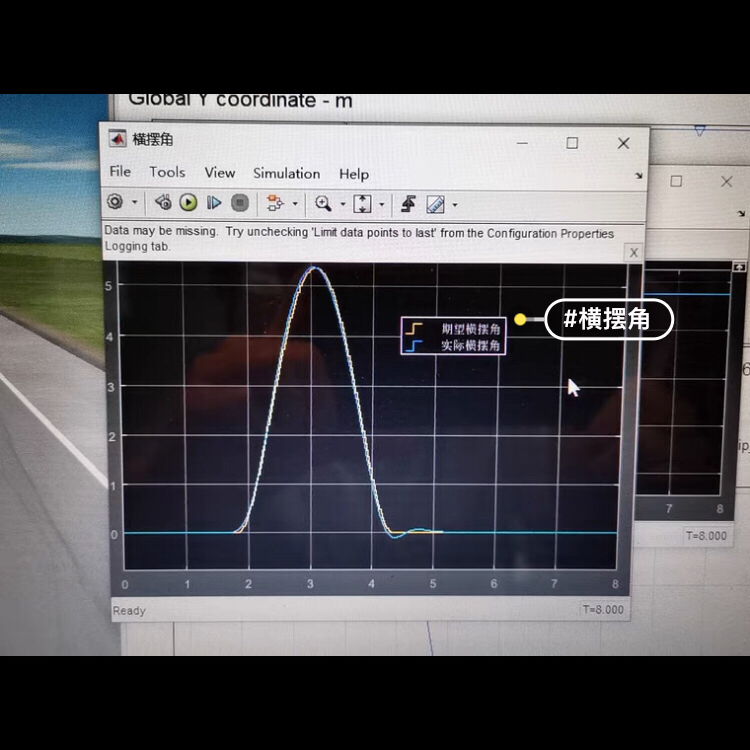
为了实现规划路径的跟踪控制,本文采用MPC预测控制算法。MPC算法是一种模型预测控制方法,通过对未来的动态模型进行预测,来优化当前的控制策略。在智能车的横向避障控制中,MPC算法可以根据预测模型得出最优的转向角度和加速度,从而实现智能车沿着规划路径行驶的精确控制。
综上所述,基于五次多项式的智能车横向避障模型通过计算预碰撞时间和最小转向距离,利用MPC预测控制算法实现规划路径的跟踪控制。这种模型和算法的应用,为智能车的安全行驶提供了重要的保障。未来,我们将进一步完善横向避障模型的细节,优化算法的性能,并将其应用于实际的智能车系统中,以实现更高效、更安全的自动驾驶技术。
相关的代码,程序地址如下:http://matup.cn/675085193208.html
















 4042
4042

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









