







复杂空间轨迹的焊接一般需要变位机的参与,加入变位机能够尽量保证焊缝处于船型焊状态,有利于焊缝成型。本文通过机器人与变位机的耦合关系,分析变位机与机器人的协调运动,并对空间相贯线进行仿真。
耦合关系
运动链的建立,如图:
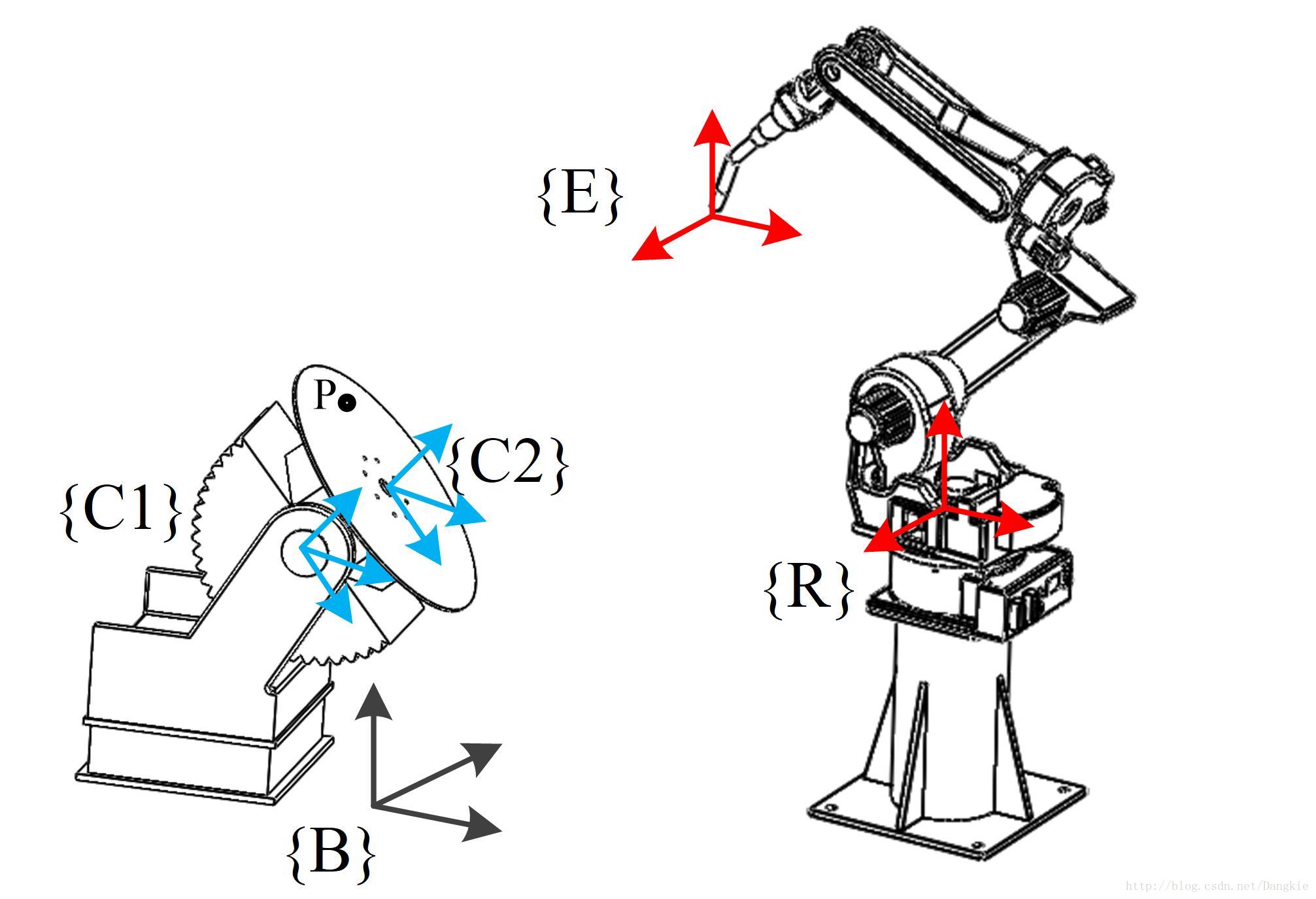
RTB⋅BTC1⋅C1TC2⋅C2TP⋅Pc=RTE⋅Pr
 本文探讨了机器人与变位机在复杂空间轨迹焊接中的耦合关系,通过坐标系变换分析了两者如何协调运动,实现焊缝在船型焊状态。通过仿真展示了相贯线轨迹及机器人在不同位置的跟踪效果,为后续的视觉纠偏控制研究提供了思路。
本文探讨了机器人与变位机在复杂空间轨迹焊接中的耦合关系,通过坐标系变换分析了两者如何协调运动,实现焊缝在船型焊状态。通过仿真展示了相贯线轨迹及机器人在不同位置的跟踪效果,为后续的视觉纠偏控制研究提供了思路。
复杂空间轨迹的焊接一般需要变位机的参与,加入变位机能够尽量保证焊缝处于船型焊状态,有利于焊缝成型。本文通过机器人与变位机的耦合关系,分析变位机与机器人的协调运动,并对空间相贯线进行仿真。
运动链的建立,如图:
RTB⋅BTC1⋅C1TC2⋅C2TP⋅Pc=RTE⋅Pr
 2159
2159

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















