






 本文介绍了全景图数据集存在的问题,如相机高度错误、不满足曼哈顿布局等,并提出了PanoSU数据集,该数据集基于SketchUp模型,专用于家居环境的墙体边缘识别。PanoAnnotatorV2作为标注工具,提升了标注效率和准确性,支持俯仰视角标注和图像调整功能。此外,文章还阐述了全景图的收集与标注流程,以及PanoAnnotatorV2的优化措施。
本文介绍了全景图数据集存在的问题,如相机高度错误、不满足曼哈顿布局等,并提出了PanoSU数据集,该数据集基于SketchUp模型,专用于家居环境的墙体边缘识别。PanoAnnotatorV2作为标注工具,提升了标注效率和准确性,支持俯仰视角标注和图像调整功能。此外,文章还阐述了全景图的收集与标注流程,以及PanoAnnotatorV2的优化措施。
公开数据集存在问题
HorizonNet 论文中用到的公开数据集存在以下问题。将问题大致分为以下三类。
- 全景图收集时相机高度有误,或者不满足曼哈顿假设即墙体之间不垂直。
- 全景图是L 型房间甚至是 T 型房间但是标注成了立方体房间。
- 全景图标注有误差,大部分修正时间花费在标注误差修正。
修正数据在 horizonNet 模型下训练准确度得到了提升。此外,还有一些全景图是楼梯过道,它们并不属于房间一类且墙体边缘线难以确定。
如下图,图一的问题为相机高度过低,图二、三的问题为不满足室内曼哈顿布局假设。此外,该数据集混合了不同环境下的室内全景图,不仅包含会议室、办公室、杂货间等非家居空间,而且包含难以识别的楼梯过道。墙体边缘标注准确度同样存在一定的误差。为此提出了PanoSU数据集,它基于PanoAnnotatorV2标注了室内墙体边缘,有效减少了误差。而且它只包含7个室内类别,专注于家居环境下的墙体边缘识别。

PanoSU数据集简介
从虚拟 SketchUp 模型中收集室内家装全景图数据, 并用 PanoAnnotatorV2 进行墙体布局标注, 简称 PanoSU 数据集. 它包括 591 张全景图和对应的文本标签, 且对每张图像进行人工类别分类。其它空间包含了储物间、衣帽间、玄关、过道、洗手台、入户花园、电梯间、前室、门厅类别. 为了训练方便我们将 PanoSU 数据集分为三个部分。 第一部分有 197 张图, 训练集有 176 张预测集有 19 张. 虚拟的 SketchUp模型来自欧神诺公司,模型是由专业的室内 CAD 设计师完成的. 通过虚拟的模型获取的全景图, 不仅避免了实地拍取全景图, 而且虚拟的 SketchUp 模型具有一定的可扩展性, 即对模型稍加修改就可以生成一张全新的室内家装全景图。如下图,为一个SU模型收集到的室内全景图,并以房间类型+唯一ID命名。

全景图收集与标注
全景图收集
将SU模型逐一导入到 lumion 景观渲染软件中,对每个模型的每个房间都拍取全景图,并严格的以房间类型加上序号的形式命名图像。Lumion是景观渲染软件,它能将设计好的 CAD 草图进行渲染,并且能够生成 VR,软件中有的全景相机拍照功能,并且能够将相机的高度固定在 1.6m 的高度。这种方式采集全景图简单高效,它仅依赖于丰富的 SKup 素材,不需要专业的人带着全景相机及支架到每个房间去拍取全景图像。
全景图标注
将收集到的室内全景图用PanoAnnotatorV2进行处理。首先进行全景图预处理,将图像对齐。如果没有进行这一步将会导致软件运行不了!!室内全景图墙体标注方法详见我的博客。半自动室内整体布局标注系统(上)
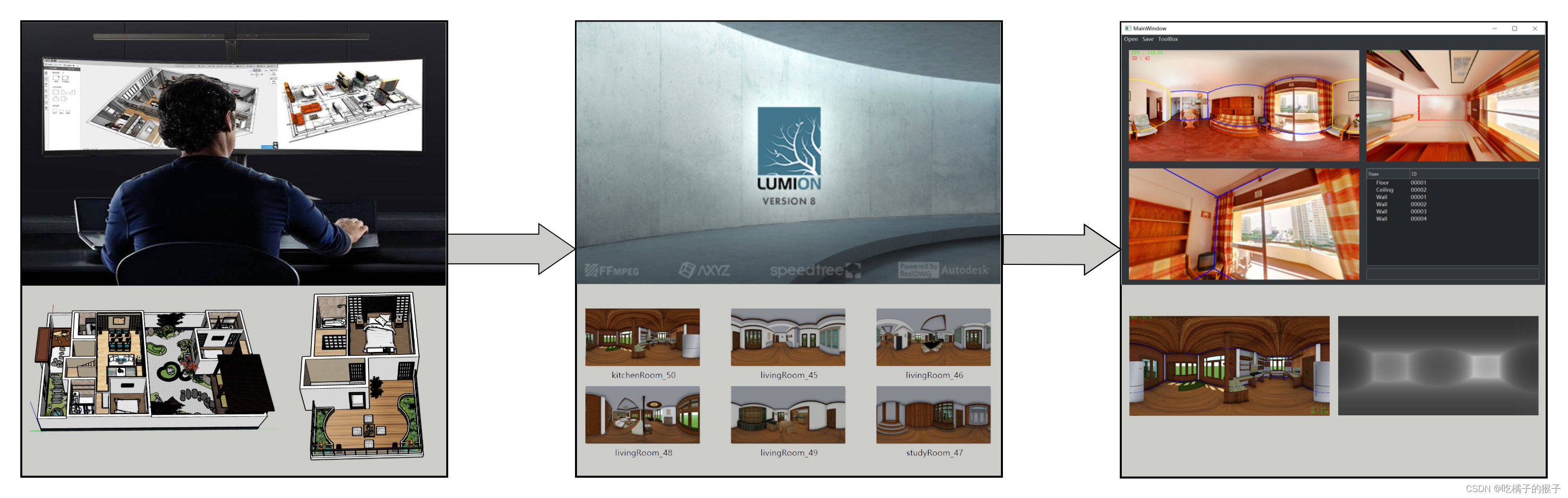
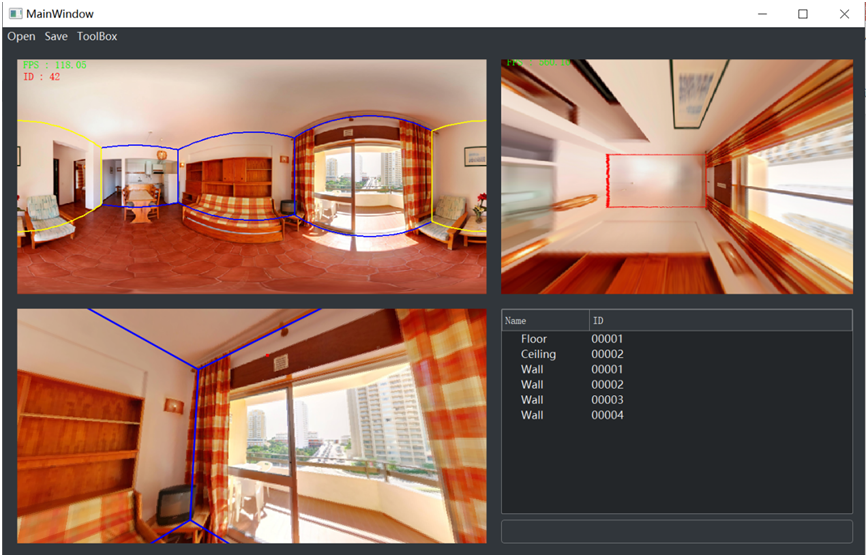
PanoAnnotatorV2简介
图 像 语 义 分 割 的 标 注 工 具 有 很 多, 常用 的 有 labelImg、LabelMestyle、visim 、PanoAnnotator、planner5D。这些都是 RBG 图像人工标注时所使用到的工具,它们的适用场景也不一样,例如 LabelMestyle 它的风格是有 3D 线框的,将每个物体用了一个立方体框住。而 PanoAnnotator 工具专注于房间布局的标注,引入了一些传统布局识别算法,称它为半自动标注工具。若只专注于房间布局标注来说PanoAnnotator 工具显然要快很多。也有人提出了一些自动的标注算法,它是基于 RGB-D图像的。拥有景深的 RGB 图像可以用算法很容易的算出来,但也不乏出现一些问题。那么对于不带景深图像的数据,使用 PanoAnnotator 来标注是比较合适的。但它有许多缺点,我们在它的基础之上改进了,使得它在房间布局标注任务中表现出色,熟练的标注一个房间仅需要 30s,而传统的 labelImg 则需要几分钟。
此外,PanoAnnotatorV2 增加了全景图俯视、仰视视角,并且在标注时可以很准确的看出墙体边缘的线框的标注情况,为标注准确性起到一定的辅助作用。针对部分数据在采集时环境的影响,我们还增加了调整图像亮度、对比度等功能,目的是让墙体线清晰可见,增加标注的准确性。此外我们还增加了模型 3D 可视化,目的是将标注结果整体可视化。为了提高标注的速度,工具在数据标签的加载和系统架构的两个方面做出调整。首先删除了TensorFlow 深度学习部分保留传统算法的校正功能,因为深度学习部分模型复杂庞大,一般只需要人工标注,追求高速,深度学习对于电脑的 GPU要求较高。其次,工具优化了图像标签数据的加载,再标注文件中增加了墙体、相机高度,目的是在加载时不需要根据墙角数据进行重复计算提高运行速度。


















 735
735

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











