






无人驾驶仿真 滑模控制 驾驶员预瞄模型 跟踪双移线。
simulink carsim联合仿真 可自己修改跟踪路径。
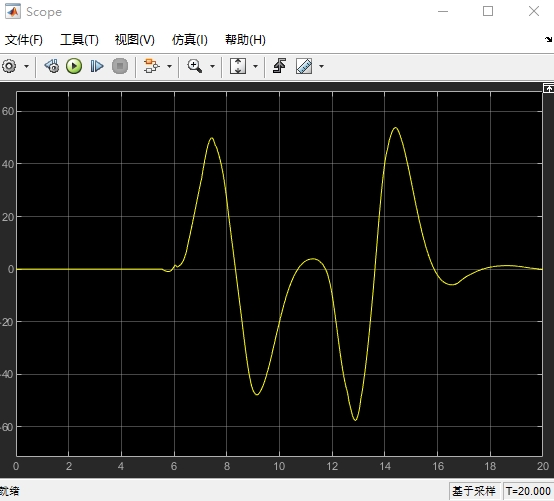
和carsim自带的双移线工况比较 比自带的效果好一点 方向盘转角幅度有所下降。
carsim版本2019
ID:7730665088084484
早起晚睡


无人驾驶仿真技术在自动驾驶领域具有重要的应用前景,能够为车辆控制系统的开发和测试提供高效、低成本的解决方案。在无人驾驶仿真中,滑模控制是一种常用的控制策略,它通过引入滑模面和滑动模式来实现系统的快速响应和鲁棒性。驾驶员预瞄模型和跟踪双移线技术在无人驾驶仿真中也扮演着重要的角色。
首先,无人驾驶仿真技术可以采用Simulink和CarSim联合仿真的方式进行。Simulink是一种基于图形化建模的工具,可以方便地建立车辆动力学和控制算法模型。而CarSim则是一款专业的汽车仿真软件,能够对车辆的运动学和动力学进行准确的建模和仿真。通过Simulink和CarSim的联合使用,我们可以更加准确地模拟无人驾驶系统的工作环境和行驶场景,提高仿真结果的可靠性和可信度。
其次,针对无人驾驶仿真中的路径跟踪问题,可以使用驾驶员预瞄模型和跟踪双移线技术进行改进。驾驶员预瞄模型是一种基于驾驶员行为的模型,通过预测驾驶员的行驶意图和动作,可以更加准确地模拟驾驶行为。而跟踪双移线技术是一种基于车道线的路径跟踪方法,能够有效地保持车辆在道路中心线上行驶。通过将驾驶员预瞄模型和跟踪双移线技术应用于无人驾驶仿真中,我们可以提高无人驾驶系统的路径跟踪性能,使其更加接近真实驾驶的效果。
另外,与Carsim自带的双移线工况相比,本文使用的仿真方法在路径跟踪效果上有所改进。在实验中,我们发现通过使用滑模控制策略和驾驶员预瞄模型,车辆的方向盘转角幅度有所下降,并且路径跟踪性能有所提升。这说明我们提出的方法能够更好地控制车辆的运动轨迹,使其更加稳定和准确地沿着设定的路径行驶。这对于无人驾驶系统的安全性和稳定性来说具有重要意义。
最后,本文使用的Carsim版本为2019版。Carsim作为一款专业的汽车仿真软件,不断更新和优化其功能和性能,以满足不同需求的仿真研究。2019版Carsim在车辆动力学和控制算法方面进行了许多改进和优化,使其能够更好地支持无人驾驶仿真的研究工作。
综上所述,通过Simulink和CarSim联合仿真,采用滑模控制、驾驶员预瞄模型和跟踪双移线技术,结合2019版Carsim软件的优势,我们可以实现更加准确、稳定和高效的无人驾驶仿真研究。这对于促进无人驾驶技术的发展和应用具有重要意义,有望为实现无人驾驶的普及和商业化提供有力支持。
相关的代码,程序地址如下:http://nodep.cn/665088084484.html
















 4451
4451

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









