






无人驾驶仿真 滑模控制 驾驶员预瞄模型 跟踪双移线。
simulink carsim联合仿真 可自己修改跟踪路径。
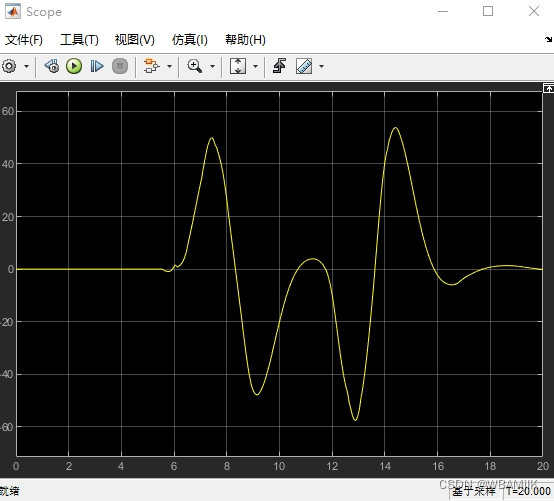
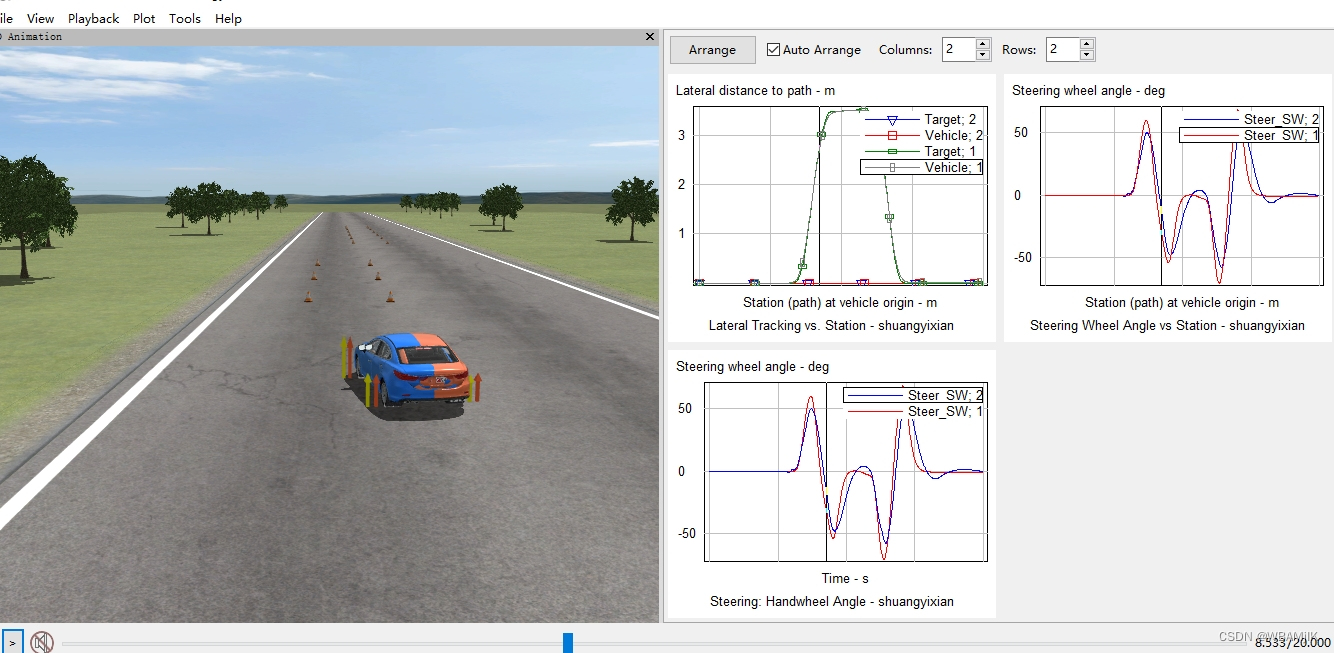
和carsim自带的双移线工况比较 比自带的效果好一点 方向盘转角幅度有所下降。
carsim版本2019
无人驾驶技术是当今汽车工业的一个热门话题,在未来几年内,它将成为汽车领域最为引人注目的技术之一。为了让无人驾驶汽车在真实场景中更加准确和高效地行驶,仿真技术逐渐成为无人驾驶的热门研究方向。在这个领域中,滑模控制和驾驶员预瞄模型成为无人驾驶仿真的重要技术。
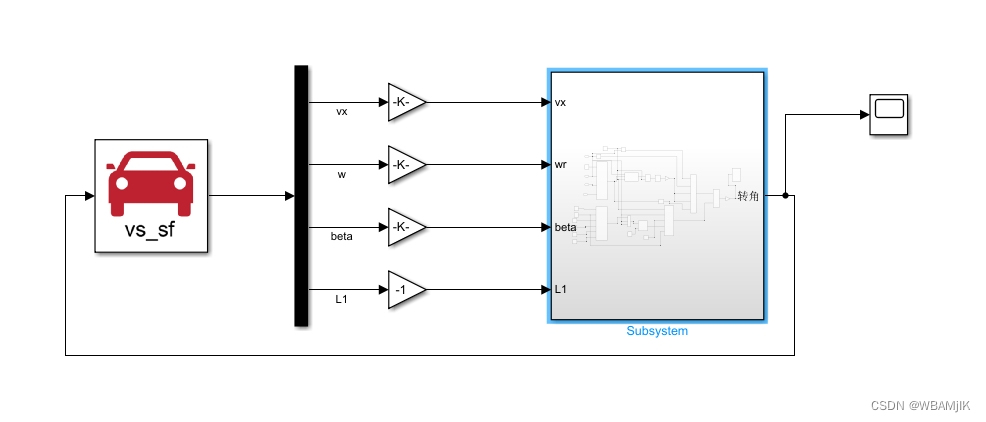
在无人驾驶仿真中,滑模控制技术是一种优秀的控制策略。它可以通过对系统的运动学和动力学特性的建模,设计适当的滑模函数来实现系统的控制。滑模控制策略不仅能够提高控制系统的鲁棒性和抗扰性,同时也能够提高系统的稳定性和响应速度。因此,滑模控制技术在无人驾驶仿真中被广泛应用。
另外,驾驶员预瞄模型也是无人驾驶仿真中的一项重要技术。驾驶员预瞄模型可以让系统实现实时的车辆轨迹预测,从而可以更加准确地预测车辆的运动轨迹,避免发生碰撞和其他事故,提高系统的安全性和可靠性。
除了滑模控制和驾驶员预瞄模型之外,跟踪双移线也是无人驾驶仿真中的一项重要技术。跟踪双移线可以通过对车辆轨迹的精确控制,实现车辆在复杂环境中的精确控制。而Carsim联合仿真可以通过对仿真软件Simulink和Carsim的联合使用,实现无人驾驶仿真中的各种功能模拟和测试。同时,Carsim版本2019还可以通过自己修改跟踪路径,让仿真更加准确和实用。
与Carsim自带的双移线工况相比,跟踪双移线的效果要好一些。通过调整滑模控制策略的参数和加入驾驶员预瞄模型可以进一步优化仿真系统的性能。同时,在仿真过程中,需要注意车辆的转向角度和方向盘转角幅度,保证无人驾驶汽车的平稳行驶,提高系统的稳定性和可靠性。
总之,无人驾驶仿真是无人驾驶技术的重要研究方向之一。通过使用滑模控制技术、驾驶员预瞄模型和跟踪双移线等技术,可以让无人驾驶仿真系统更加准确、高效、稳定和可靠。而Carsim联合仿真则为无人驾驶仿真系统的开发和测试提供了强有力的支持,可以让无人驾驶汽车更好地实现自动驾驶。
相关代码,程序地址:http://lanzouw.top/665088084484.html















 1088
1088











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









