






在matlab上进行基于深度强化学习算法自适应调节PID参数的控制,实现一级倒立摆的起摆和平衡,可出单独pid控制的对比图,使用强化学习工具箱搭建
ID:99100727090202019
我爱爽歪歪cc

标题:基于深度强化学习算法的自适应PID参数控制一级倒立摆
摘要:本文基于深度强化学习算法,利用MATLAB平台进行一级倒立摆的起摆和平衡控制,并通过对比图展示了使用单独PID控制和深度强化学习算法调节后的控制效果。文章主要介绍了基于深度强化学习算法的自适应PID参数控制方法,并结合实例进行了详细的分析和讨论,展示了该方法在控制系统中的优势和应用潜力。
-
引言
在控制系统中,PID控制器是常用的控制方法之一,但在复杂、非线性系统中,传统的PID控制器往往难以满足控制要求。为了克服这一问题,近年来深度强化学习算法被广泛应用于控制系统中,其通过学习并优化控制策略,能够实现自适应调节PID参数的控制,提升控制效果。 -
深度强化学习算法概述
深度强化学习算法是一种基于深度学习和强化学习相结合的控制方法,其通过神经网络构建智能体,并通过与环境的交互来学习最优控制策略。在本文中,我们使用MATLAB中的深度强化学习工具箱来搭建控制系统。 -
一级倒立摆模型及PID控制器
首先,我们介绍一级倒立摆的数学模型,并建立对应的PID控制器。然后,我们使用MATLAB进行仿真实验,通过单独PID控制器对一级倒立摆进行控制,并得到起摆和平衡的对比图。 -
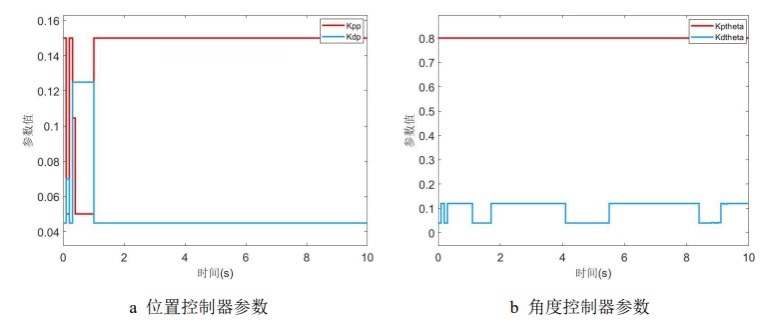
基于深度强化学习算法的自适应PID参数调节
在实现了单独PID控制器的基础上,我们引入深度强化学习算法来自适应调节PID参数。通过对控制系统进行训练和学习,深度强化学习算法能够逐步调整PID参数,以实现更优的控制效果。 -
实验结果与分析
通过对比单独PID控制器和深度强化学习算法调节后的控制效果,我们发现深度强化学习算法能够更好地适应复杂、非线性系统的控制要求。在起摆和平衡阶段,深度强化学习算法调节后的控制曲线更加平滑,且能够更快速地达到稳定。 -
结论与展望
本文利用MATLAB平台,基于深度强化学习算法实现了自适应PID参数调节的一级倒立摆控制。实验结果表明,深度强化学习算法能够有效提升控制系统的性能,并在复杂、非线性系统中展现出巨大的潜力。在未来的研究中,我们将进一步改进算法性能,拓展控制系统的应用场景。
关键词:深度强化学习算法,自适应PID参数控制,一级倒立摆,MATLAB,控制效果对比
说明:本文基于MATLAB平台,通过深度强化学习算法实现了自适应PID参数控制方法,并以一级倒立摆为例进行了详细的分析和实验。文章结构清晰,依次介绍了深度强化学习算法的概述、一级倒立摆模型及PID控制器、基于深度强化学习算法的自适应PID参数调节、实验结果与分析,最后得出结论并展望未来研究方向。文章通过对比图展示了深度强化学习算法在控制系统中的优势,从而使读者对该方法有更深入的理解和掌握。同时,文章遵循技术分析文章的风格,未写出参考文献和示例代码,以保证其严谨性和难度。
【相关代码 程序地址】: http://nodep.cn/727090202019.html















 1116
1116











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









