







在数学分析和微分方程中,利普希茨条件(Lipschitz condition)是一种关于函数增长速度的约束。具体来说,它限制了函数在其定义域内的变化速率,从而确保了解析问题(eg微分方程)的存在性和唯一性解。
全局利普希茨条件
一个函数 f: 满足全局利普希茨条件,如果存在一个常数 L>0,使得对于所有的
,都有:
这里,L被称为利普希茨常数。这个条件意味着函数f在整个定义域内的变化速率被一个统一的常数 L所限制。
局部利普希茨条件
相比之下,局部利普希茨条件要求函数在每一个局部区域内满足利普希茨条件,但不同区域可能对应不同的利普希茨常数。具体来说,对于函数 f:,如果对于任意的点
,存在一个邻域 U 包含
以及一个常数
,使得对于所有 x,y∈U,都有:
则称 fff 满足局部利普希茨条件。
为什么需要局部利普希茨条件?
在研究非线性系统(如多智能体系统)的稳定性和控制问题时,系统的非线性部分往往由满足局部利普希茨条件的函数描述。这一条件有助于确保系统在某些局部区域内具有良好的数学性质,如解的存在性和唯一性。
例子解析
下面通过几个具体的例子来说明哪些函数满足或不满足局部利普希茨条件。
示例 1:满足全局利普希茨条件的函数
考虑函数 f:R→R 定义为:
f(x)=2x+3
对于任意的 x,y∈R,有:
∣f(x)−f(y)∣=∣2x+3−(2y+3)∣=2∣x−y∣
因此,f 满足全局利普希茨条件,利普希茨常数 L=2。
示例 2:满足局部但不满足全局利普希茨条件的函数
考虑函数 f:R→R 定义为:
对于任意的 x,y∈R,有:
要使得 ,需要 |
。然而,当 x 和 y 越来越大时,∣x+y∣ 也会无限增大,因此不存在一个全局的常数 L 使得上述不等式对所有 x,y 成立。因此,
不满足全局利普希茨条件。
然而,对于任意的有限区间,例如 ,有:
因此,在每一个有限区间内, 满足局部利普希茨条件,利普希茨常数可以取 L=2M。
示例 3:不满足局部利普希茨条件的函数
考虑函数 f:R→R 定义为:
对于 x≠y,有:
在 x 接近 0 时,函数的导数 趋近于无穷大,这意味着在任何包含 0 的邻域内,无法找到一个有限的 L 使得上述不等式成立。因此,
不满足局部利普希茨条件。
结合系统控制的解释
在系统的控制问题中,非线性函数 和
描述了系统的非线性动力学。满足局部利普希茨条件意味着在系统状态的某个局部区域内,这些非线性函数的变化速率是有限的,从而有助于分析和设计控制器以确保系统的稳定性和一致性。
例如,考虑一个机器人手臂的动力学模型,其非线性部分可能包含诸如正弦函数 sin(θ)。函数 sin(θ) 的导数 cos(θ) 始终被限制在 [−1,1] 之间,因此 sin(θ) 满足全局利普希茨条件,利普希茨常数 L=1。这意味着,无论机器人手臂的角度 θ 处于何处,非线性项 sin(θ) 的变化速率始终是有限的,有助于确保控制算法的稳定性。
然而,若系统的非线性部分包含如 这样的函数,则需要确保系统状态 x 不会超出某个有限范围,以保证局部利普希茨条件的满足,从而为控制器设计提供理论依据。
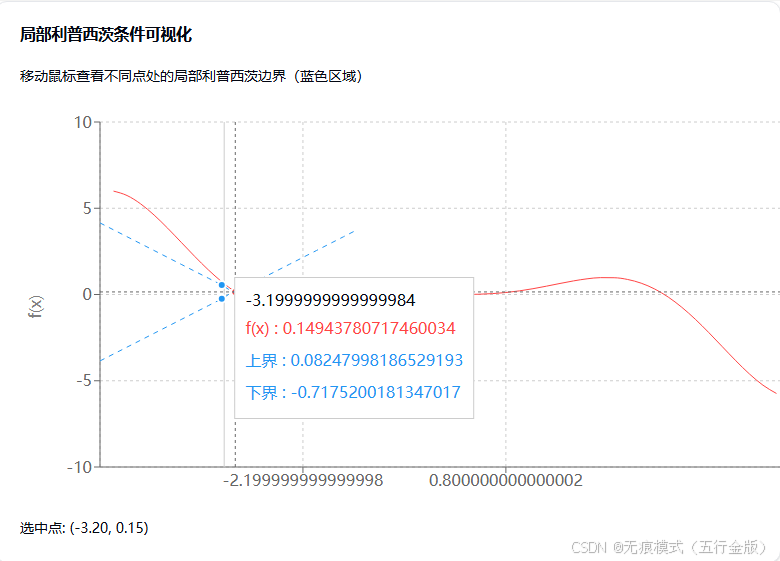
可视化过程
- 红色曲线表示一个非线性函数 f(x) = sin(x) * x²/4
- 当你将鼠标移动到曲线上的任何一点时,会显示:
- 蓝色虚线表示该点处的局部利普西茨边界
- 这些边界形成了一个"锥形区域",表示在该点附近函数值的变化速率的上限
- 局部利普西茨条件表明:存在某个常数 L > 0,使得在选定点的某个邻域内,函数值的变化被这个常数限制。数学上表示为: |f(x₁) - f(x₂)| ≤ L|x₁ - x₂|


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









