






- 描述关节姿态
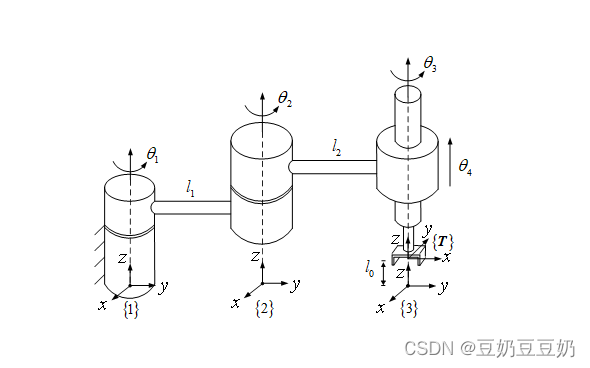
串联机器人的关节由电机+连杆组成,如下图所示:
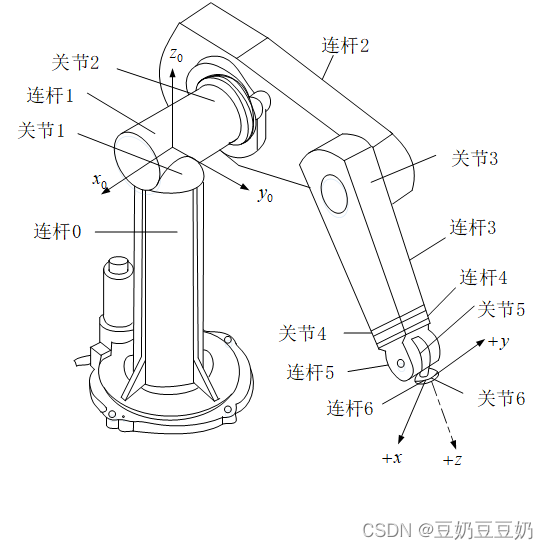 |  |
| 图1 PUMA560机器人结构模型 | 图2 PUMA560机器人实物 PUMA 560 robot in the experiment. | Download Scientific Diagram (researchgate.net) |
串联机器人的关节由电机+连杆组成,如下图所示:
| |
| 图1 PUMA560机器人结构模型 | 图2 PUMA560机器人实物 PUMA 560 robot in the experiment. | Download Scientific Diagram (researchgate.net) |
 2859
2482
2859
2482

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























