






 本文探讨了机器人建模中的逆运动学重要性,介绍了正运动学和逆运动学的基本概念。重点讲解了D-H参数法在建立坐标系和计算机器人位姿中的应用,包括旋转和平移的矩阵变换。通过这种方法,可以高效地求解机器人关节变量以达到期望的位姿,同时也指出了快速计算逆解对于机器人精确运动的重要性。
本文探讨了机器人建模中的逆运动学重要性,介绍了正运动学和逆运动学的基本概念。重点讲解了D-H参数法在建立坐标系和计算机器人位姿中的应用,包括旋转和平移的矩阵变换。通过这种方法,可以高效地求解机器人关节变量以达到期望的位姿,同时也指出了快速计算逆解对于机器人精确运动的重要性。
- 工业机器人的逆运算要重要的多,因为需要在已知末端执行器位姿的前提下,求解机器人的关节变量,从而将机器人放置在期望的位姿。
- 机器人的控制器用这些方程来计算关节值,并以此来运行机器人达到期望位姿。
- 机器人正运动学:构型已知,即它的所有的连杆长度和关节角度都是已知的,需要去计算机器人手的位姿。
- 对于正运动学,必须推导出一组与机器人特定构型有关的方程,以使得将已知的关节和连杆变量带入这些方程就能计算出机器人的位姿,然后可用这些方程推导出逆运动学方程。
- 正运动学具体是根据机器人的连杆和关节的构型配置,可用一组特定的方程来建立机器人手的坐标系和参考坐标系的联系。
- 为简化过程,可分别分析位置和姿态问题,首先推导出位置方程,然后再推导出姿态方程,再将两者结合在一些而形成一组完整的方程。
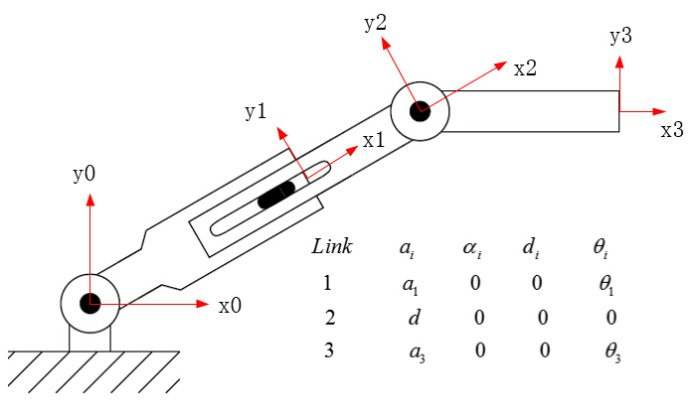
- 位置的正逆运动学方程,这里仅考虑链式坐标,可用D-H表示法推导链式坐标的矩阵表示法。
- 姿态的正逆运动学方程:滚动角(Z轴),俯仰角(Y轴),偏航角(Z轴)
- 姿态变化矩阵求解:(由此,可以用已知末端执行器位姿,求其RPY角度)
<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1328
1328











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









