






基于CANoe的Bootloader上位机软件
下位机为飞思卡尔MC9S12G128MLL

引言
CANoe是一款广泛应用于车联网领域的测试工具,可以用于模拟ECU(Electronic Control Unit)的应用场景、分析CNA(Controller Area Network)的网络通信以及进行功能验证和调试等工作。在实际的应用场景中,我们经常需要对ECU进行在线升级,而CANoe的Bootloader上位机软件可以帮助我们实现这个功能,提高了整个车联网系统的可靠性和安全性。
本文将围绕基于CANoe的Bootloader上位机软件展开分析,在飞思卡尔MC9S12G128MLL下位机的支持下,通过分析CAN协议实现在线升级,并详细介绍软件架构、协议栈以及实现流程等方面的内容,旨在帮助读者更好地理解和掌握CANoe的Bootloader上位机软件的应用。
第一部分:软件架构分析
CANoe的Bootloader上位机软件主要由以下几个模块组成:
-
Bootloader:负责接收上位机软件发送的升级文件,解析文件内容,并将文件内容发送给下位机进行升级。
-
Communication:负责与CANoe进行通信,接收CANoe发送的升级指令并进行处理。
-
Protocol Stack:用于实现CAN协议的解析和封装,包括CAN帧的解析和组装。
-
User Application:实现了对MC9S12G128MLL下位机的控制和管理,在升级过程中与Bootloader模块进行通信,并完成升级过程中的各项操作。
以上模块协同工作,实现了CANoe的Bootloader上位机软件的核心功能。接下来,我们将分别对这些模块进行详细的介绍。
第二部分:协议栈分析
CANoe的Bootloader上位机软件基于CAN协议实现,在实际的升级过程中,需要按照一定的协议格式进行数据传输,以保证数据的正确性和可靠性。因此,在软件开发中,需要实现CAN协议栈,完成CAN帧的解析和组装。在CANoe的Bootloader上位机软件中,主要涉及到以下几个协议:
-
CAN2.0A/B:实现CAN帧的解析和组装,完成数据的传输功能。
-
UDS:实现诊断数据的传输和处理,提供符合ISO14229标准的UDS诊断协议。
-
XCP:实现数据采集与校准的功能,提供符合ASAM MCD-1标准的XCP协议。
以上协议在CANoe的Bootloader上位机软件中协同工作,实现了CAN升级的功能。
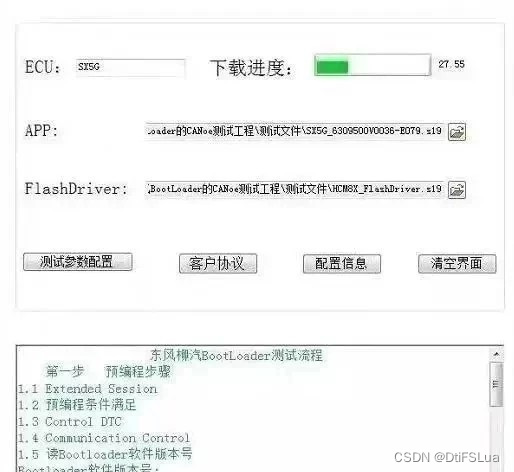
第三部分:实现流程介绍
CANoe的Bootloader上位机软件的实现流程主要分为以下几个步骤:
-
与CANoe进行通信,接收CANoe发送的升级指令。
-
解析收到的升级指令,获取升级文件信息。
-
根据升级文件的信息,读取升级文件内容,并将数据发送给下位机。
-
监听下位机的响应信息,并进行相应处理。
-
在升级过程中处理各种异常情况和错误信息。
-
升级完成后,发送响应信息给CANoe,完成整个升级过程。
以上流程是整个升级过程的核心流程,实现了CANoe的Bootloader上位机软件的核心功能。在实际应用中,需要根据具体的升级需求进行相应的流程调整和优化,以确保升级的效率和可靠性。
结语
本文主要针对基于CANoe的Bootloader上位机软件展开分析,详细介绍了软件架构、协议栈以及实现流程等方面的内容,希望能够帮助读者更好地理解和掌握CANoe的Bootloader上位机软件的应用。同时,也希望本文能够对车联网领域的技术开发者们提供一定的参考和借鉴。
相关代码,程序地址:http://lanzouw.top/668870980676.html














 1612
1612











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









