






参考资料:BV1GQ4y1w7x5
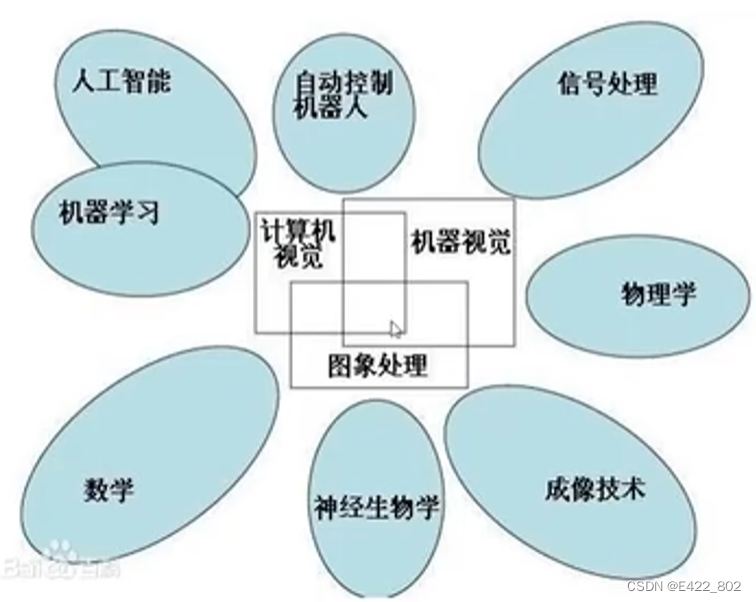
计算机视觉和机器视觉的区别
计算机视觉侧重于对质的分析(分类识别,身份确认,行为分析)
机器视觉侧重于对量的分析(零件内外径,物体计数,三维形貌测量)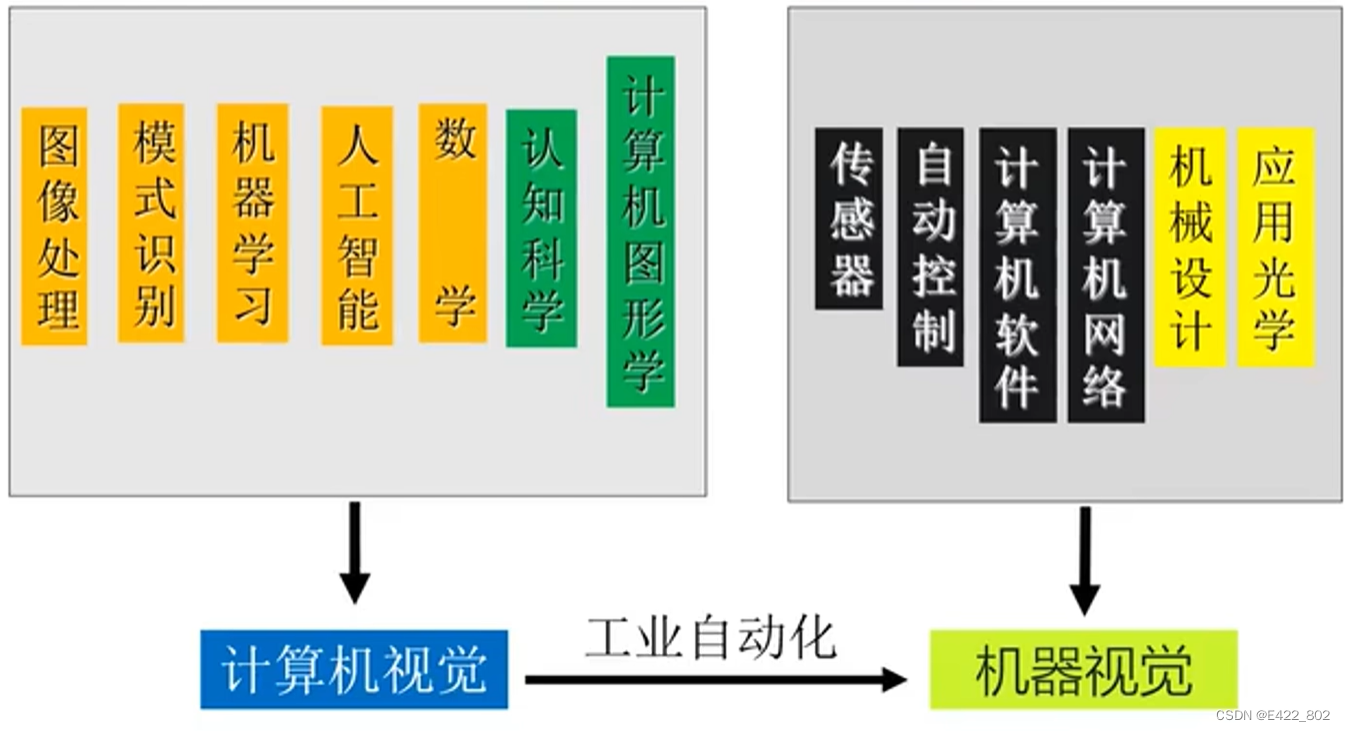
数字图像处理(DIP)(digital image processing)是通过计算机对图像进行去除噪声、增强、复原、分割、提取特征等处理的方法和技术。
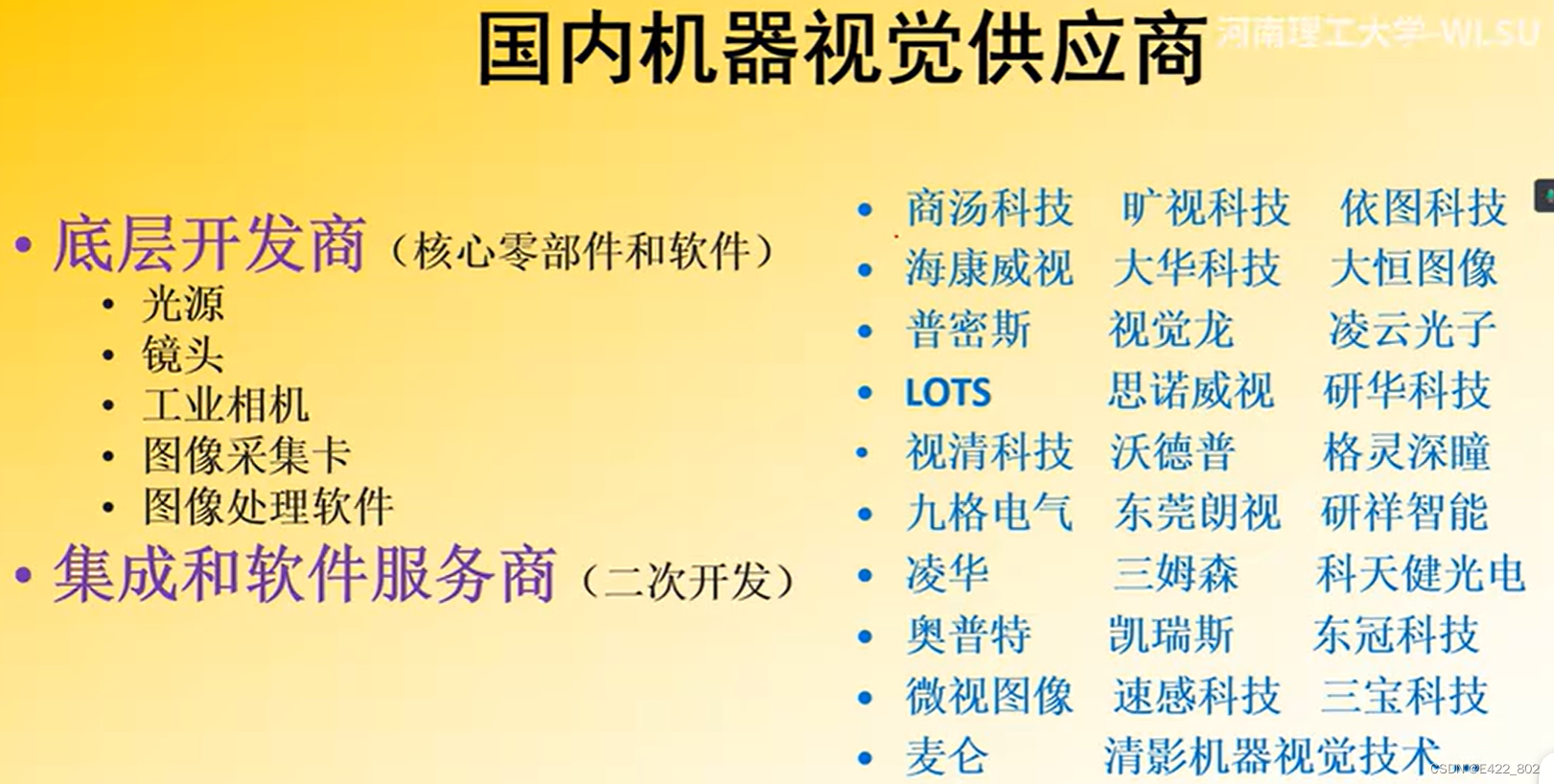
机器视觉介绍以及工作原理
机器视觉:是指使用智能机器代替人类视觉进行物体和环境识别,通过相机采集图像并使用软件算法进行分析和理解最终使机器具有和生物视觉类似的场景感知能力。
机器人视觉伺服系统组成:机器人系统,视觉系统。
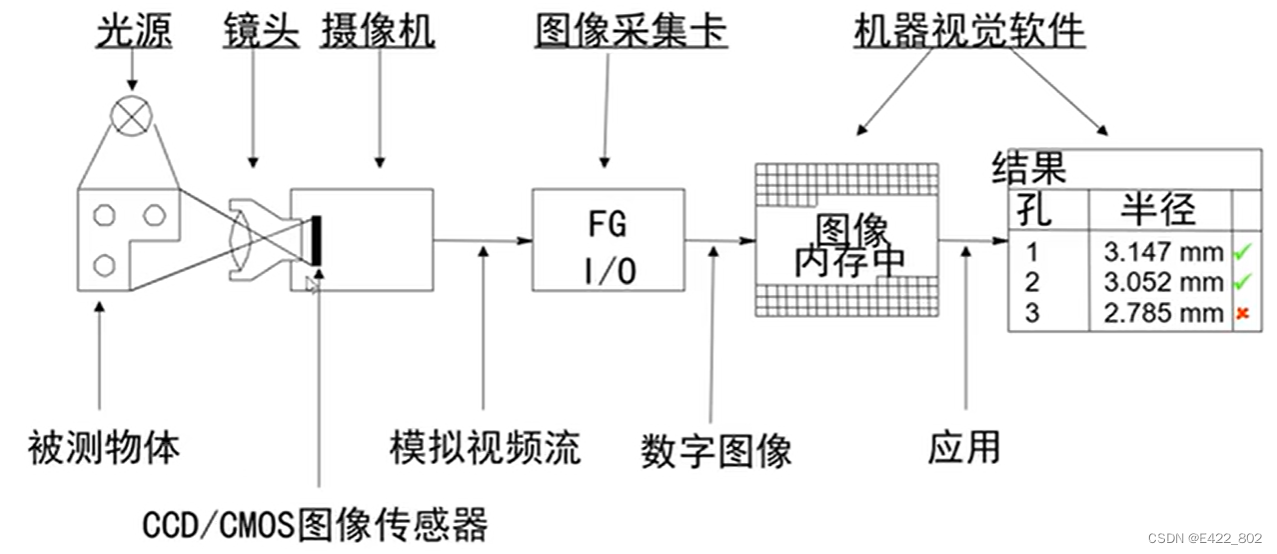
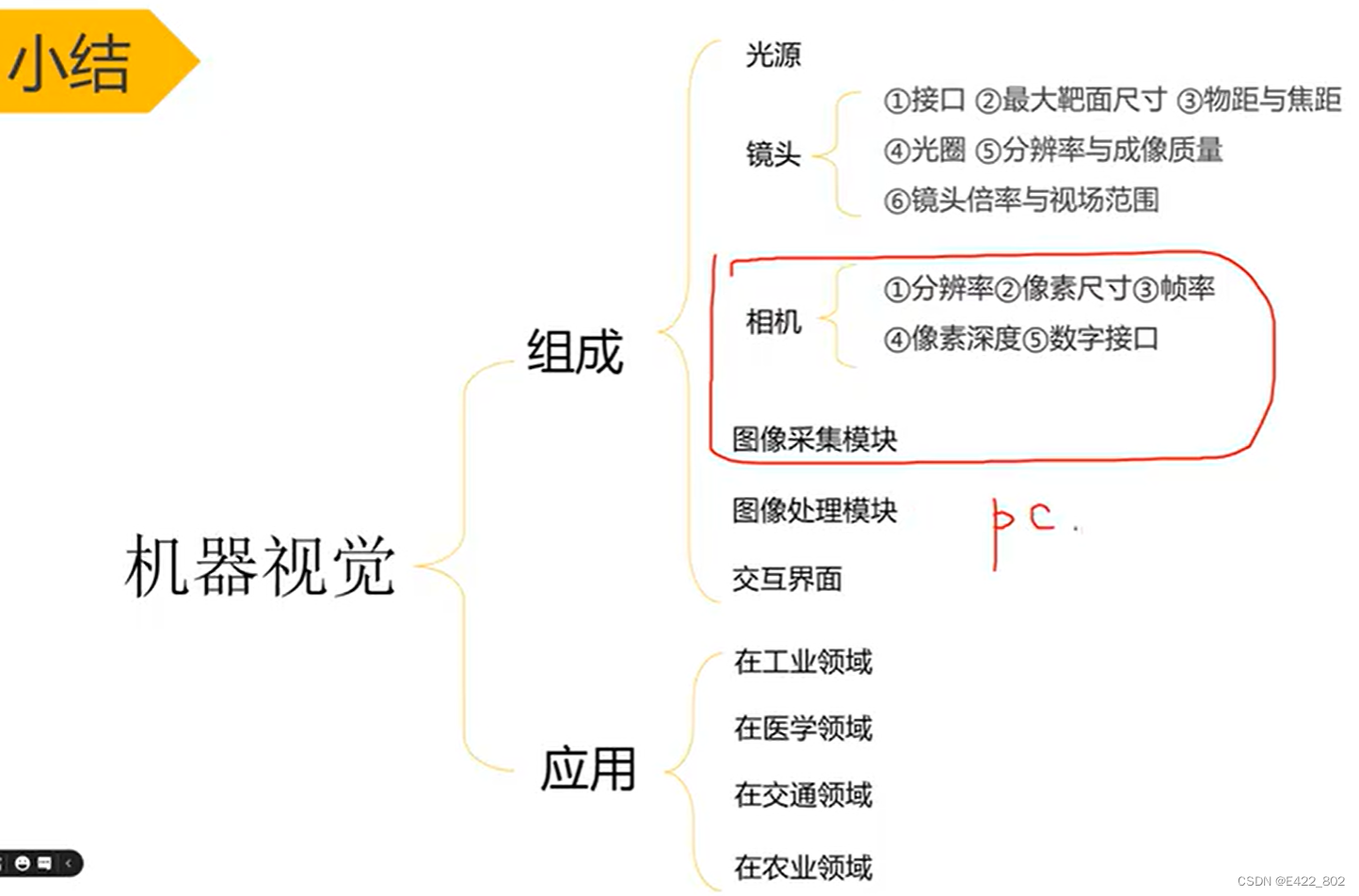
机器视觉硬件系统的组成:光源、镜头、相机、图像采集模块、图像处理模块、交互界面等。
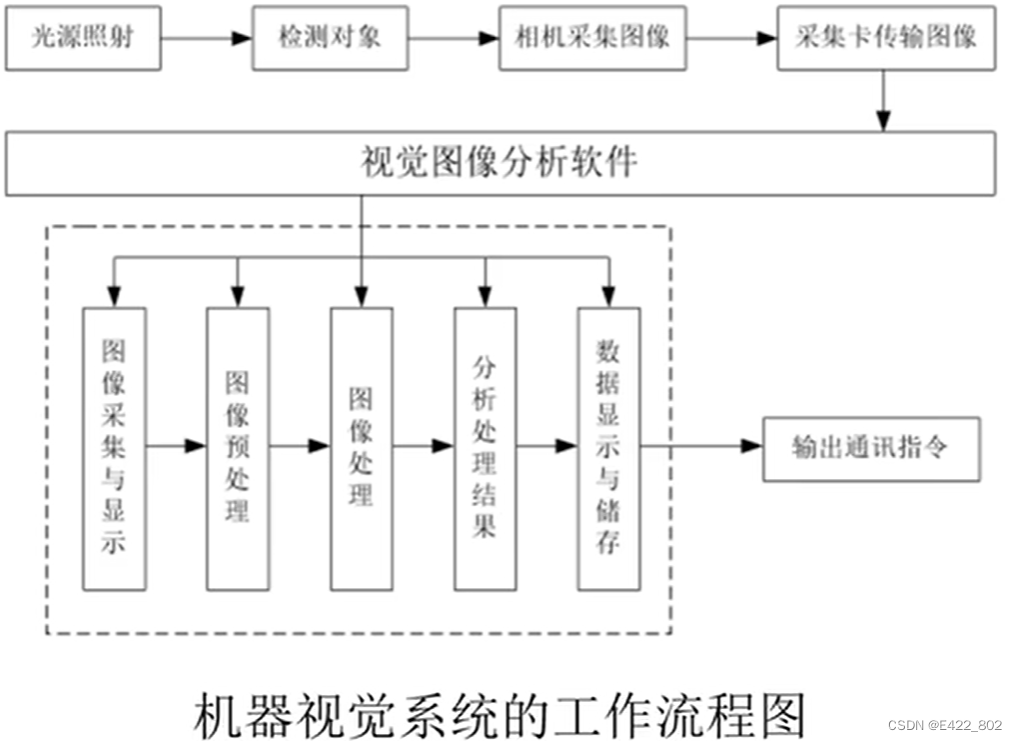
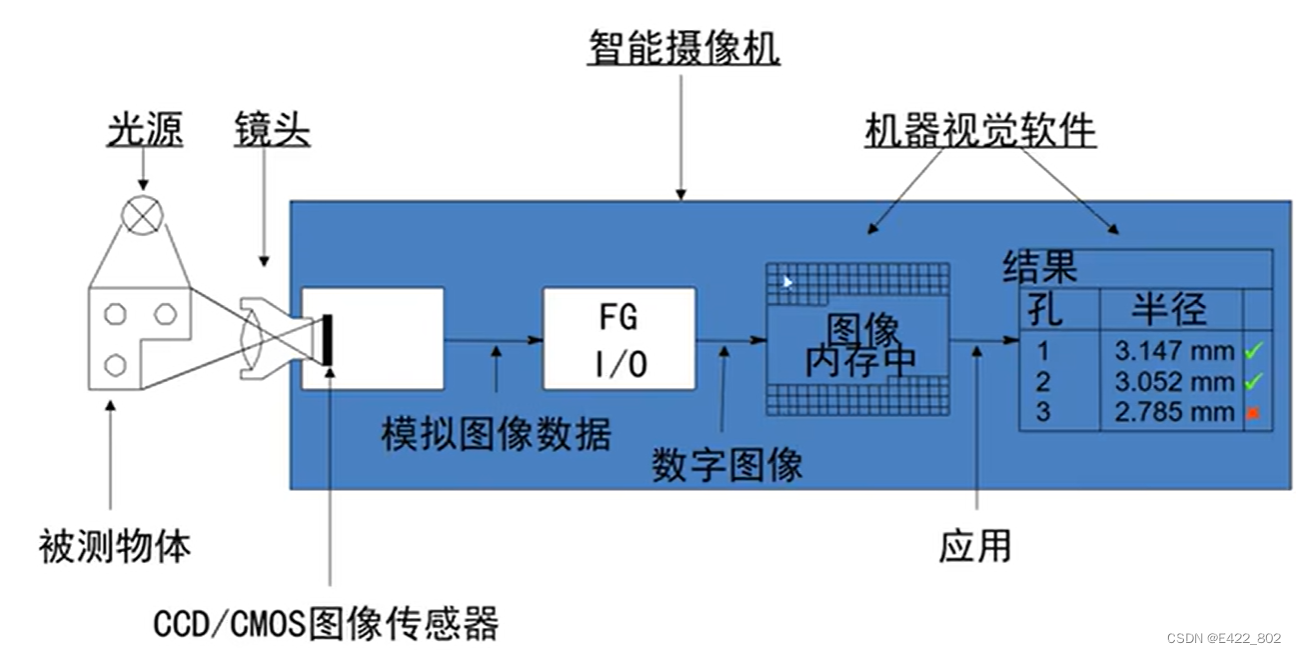
在使用模拟相机、数字相机和智能相机时,机器视觉的工作流程的如下图所示:
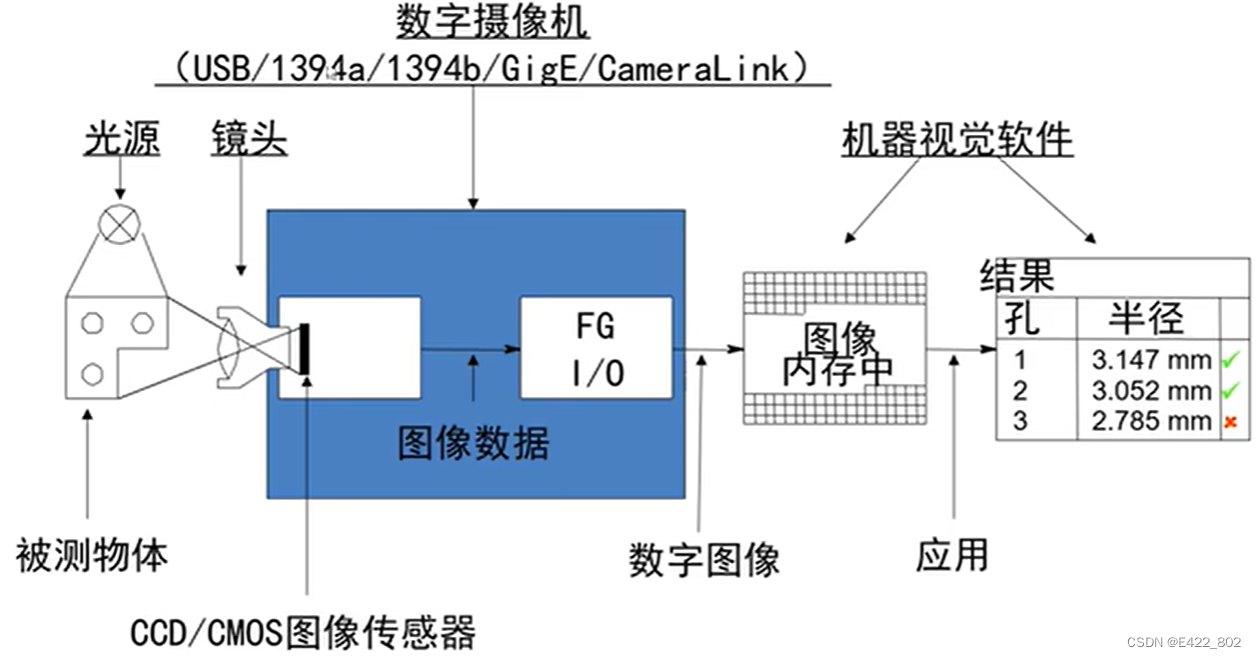
课程采用了数字相机的方式,作为学生,要学习编写算法来处理采集到的图像。
光源
光源的分类:高频荧光灯、卤素灯、LED灯。
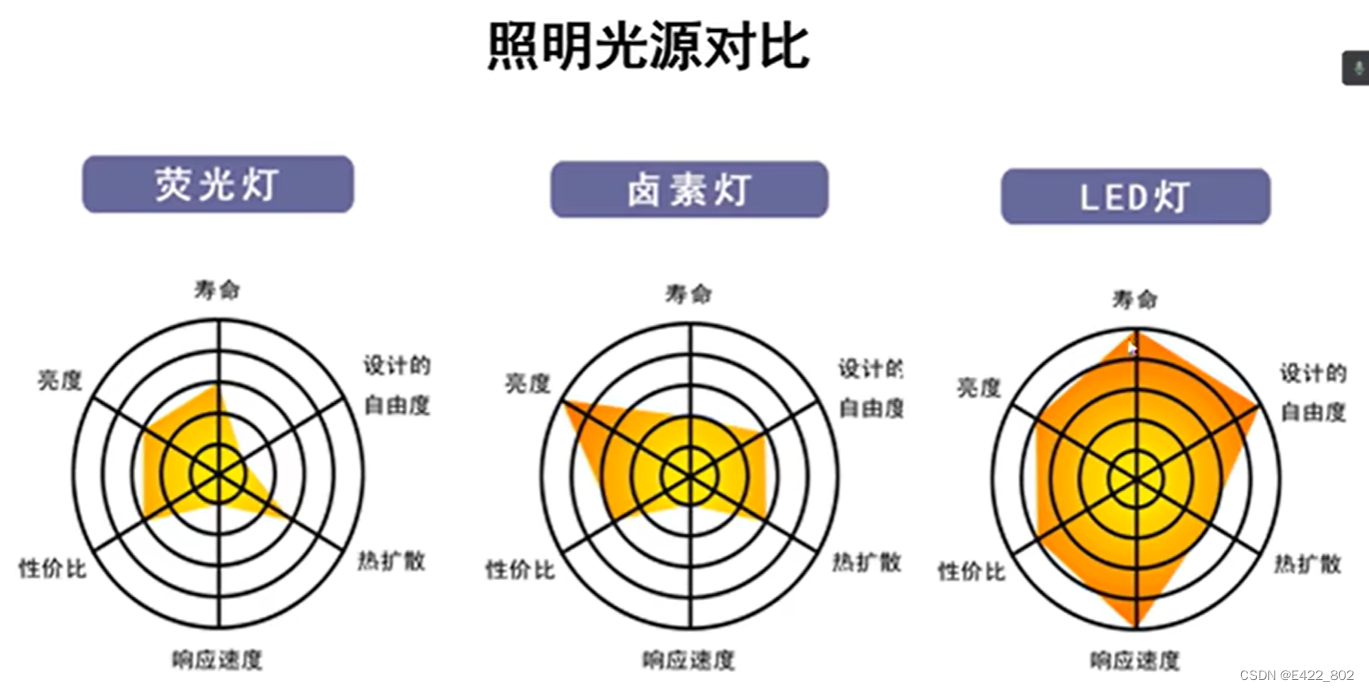
现在LED灯的应用处于绝对主流。
LED灯的特点:
能制成各种形状尺寸,角度;
能按需制成各种角度、随时调节亮度;
散热好,亮度稳定;
寿命长;
反应快(10μs内可达最大亮度);
电源带有外触发,可以通过计算机控制,启动速度快,可以用作频闪灯;
综合成本优势;
可以实现客制化。
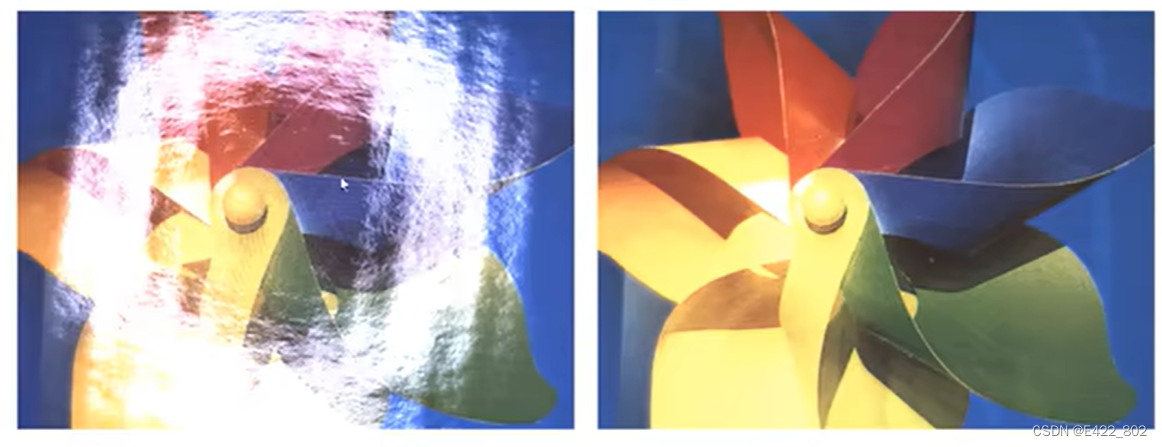
光源的重要性:正确的光源配置,能更好的凸显出被检测物体的特征,降低算法的难度。
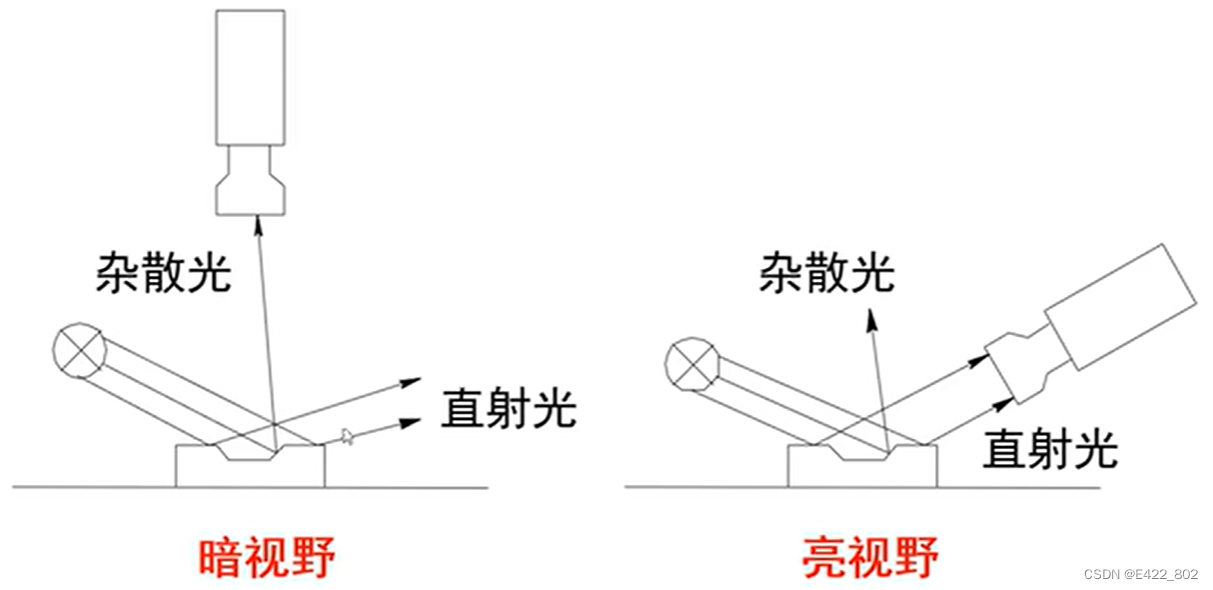
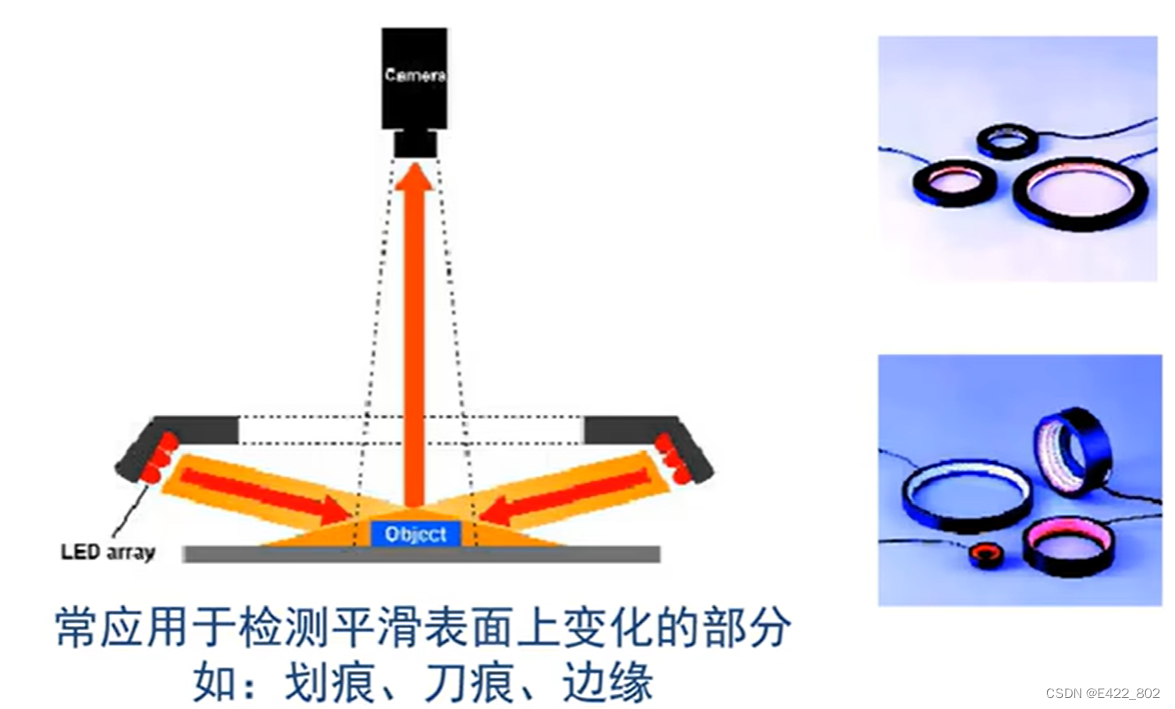
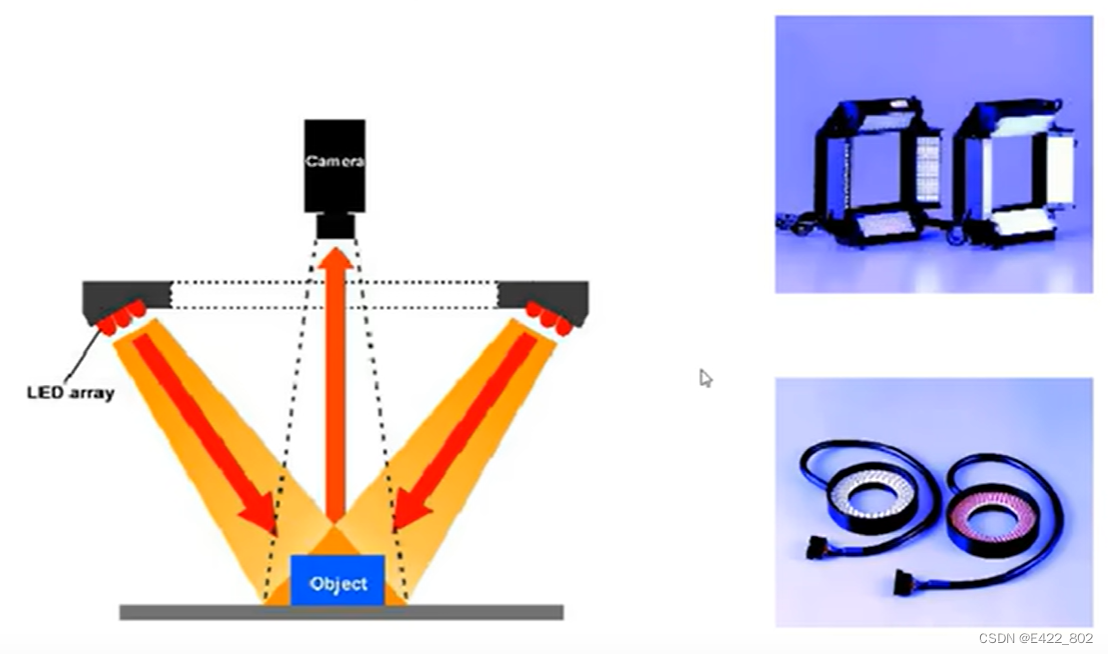
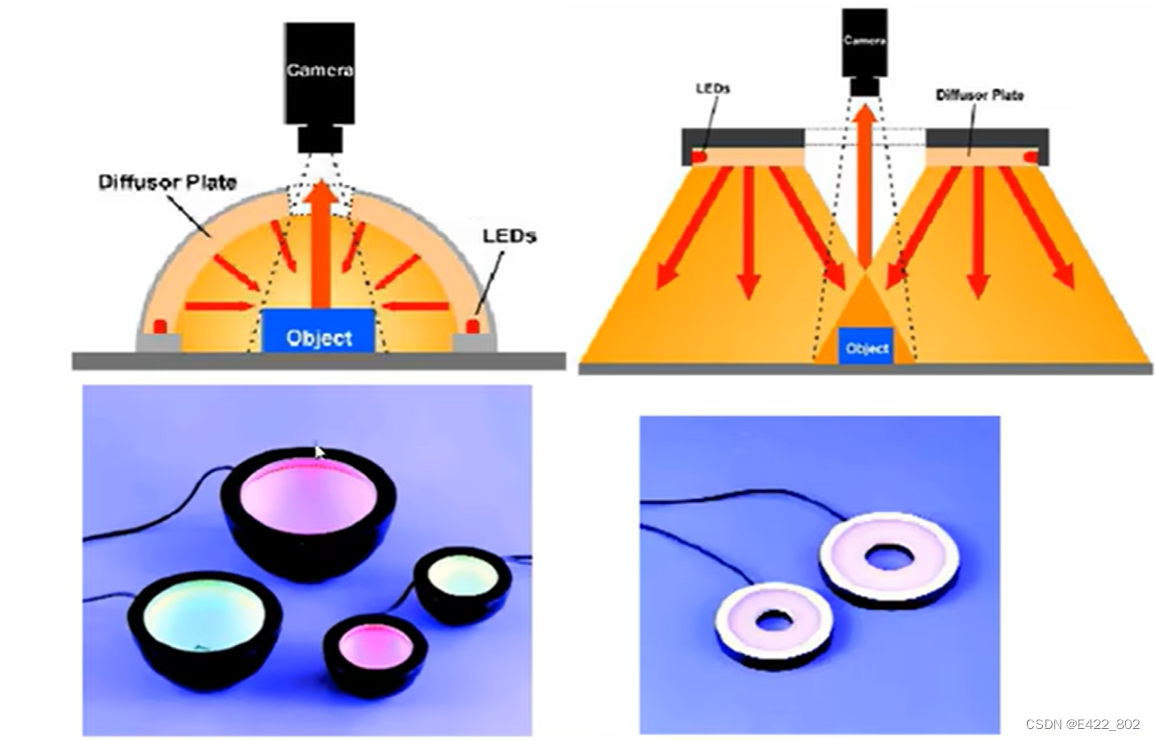
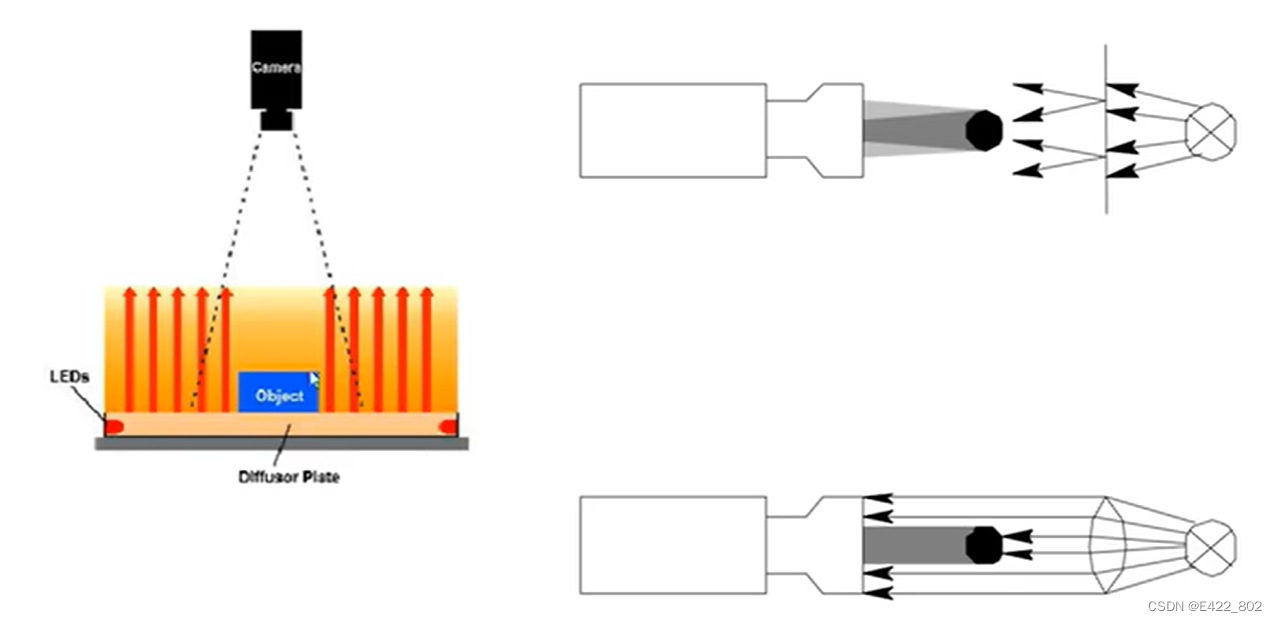
照明技术:亮视野与暗视野、低角度照明、前向光直射照明、前向光漫射照明、背光照明。
颜色与补色:通过合理的色彩来突出想要获取的特征。
偏光技术:消除物体的炫光。

镜头
镜头是与相机配合起来使用的一种设备。
作用:
成像:没有镜头,相机不能采集到任何图像,输出将被噪声淹没;
聚焦:当镜头成像平面不在摄像机像面上时,输出图像模糊不清;
曝光:改变光积分时间/曝光量--改变灰度(人眼不具备功能);
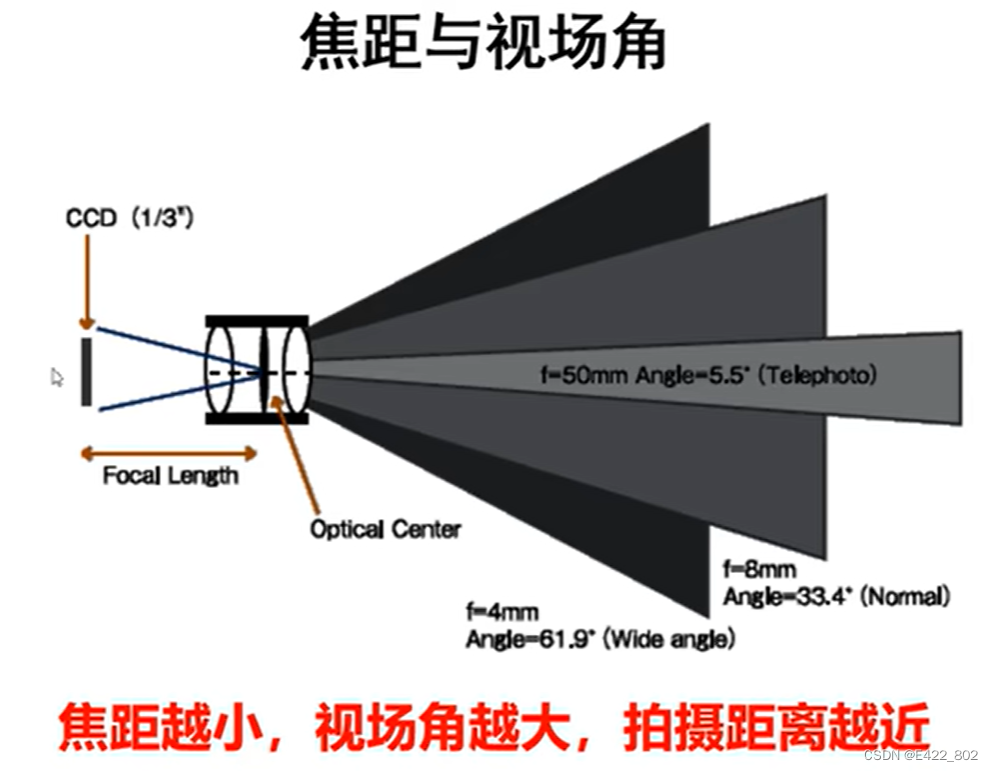
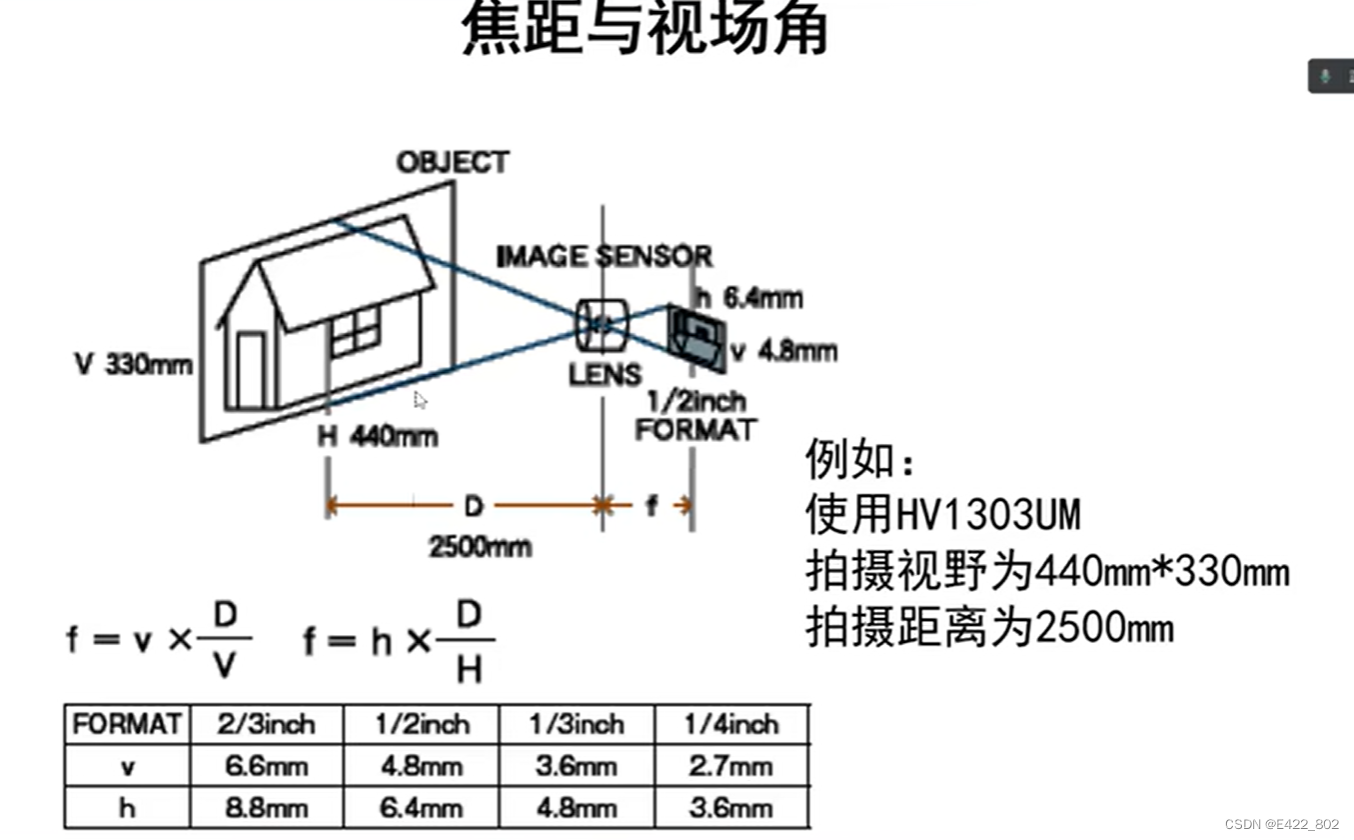
变焦:改变镜头的焦距--改变成像大小(人眼不具备功能)。
视场(field of vision ,FOV)
系统能够观察到的物体的物理尺寸范围,也就是CCD芯片上所成图像最大时对应的物体的大小。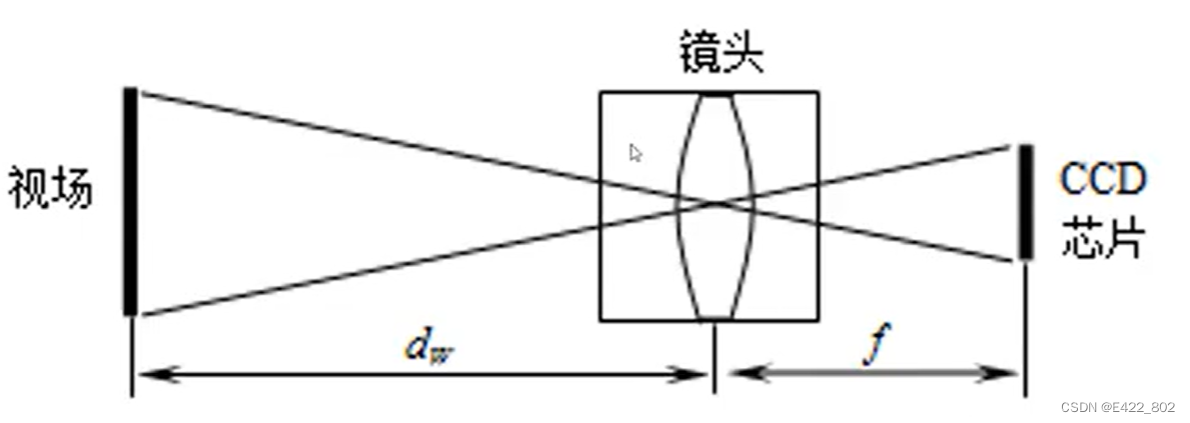 光学倍率
光学倍率
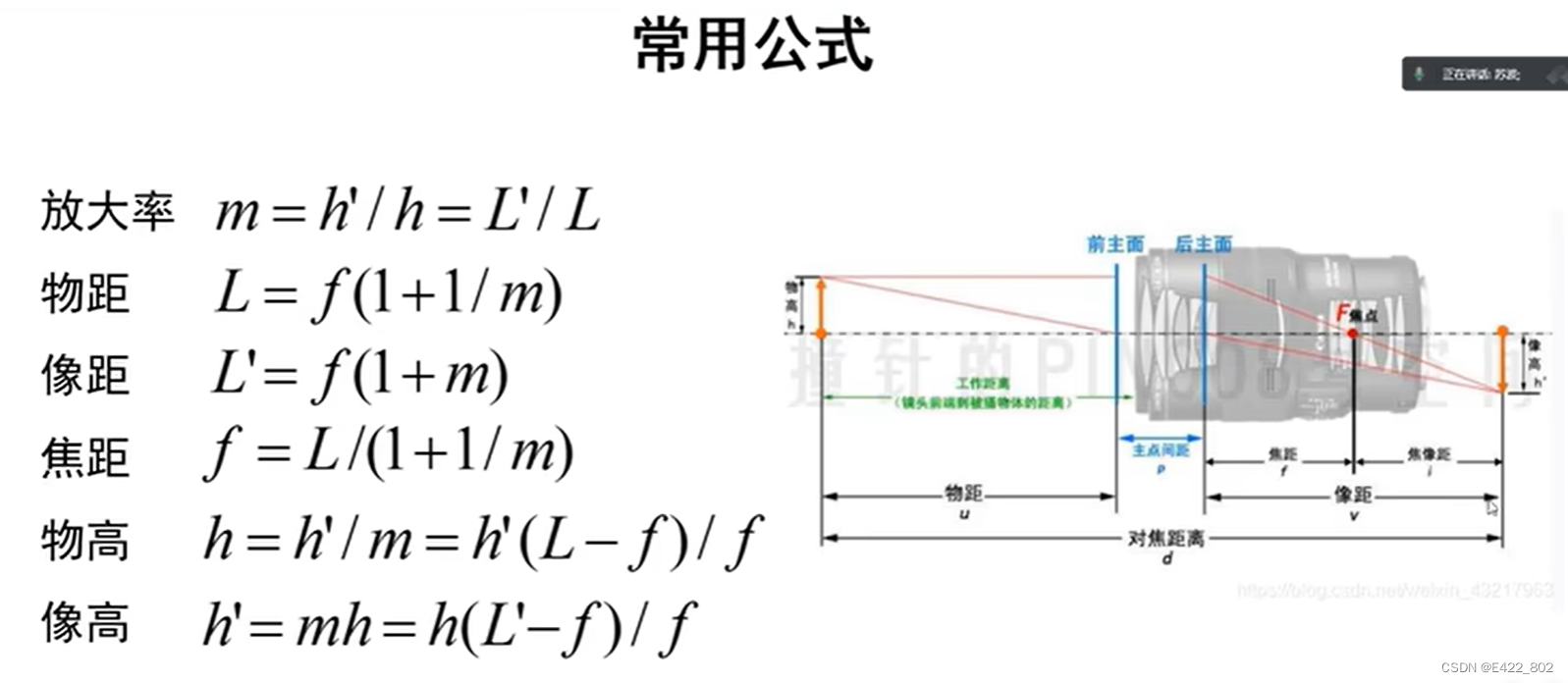
光学倍率(magvification)是指成像大小与物体尺寸的比值。

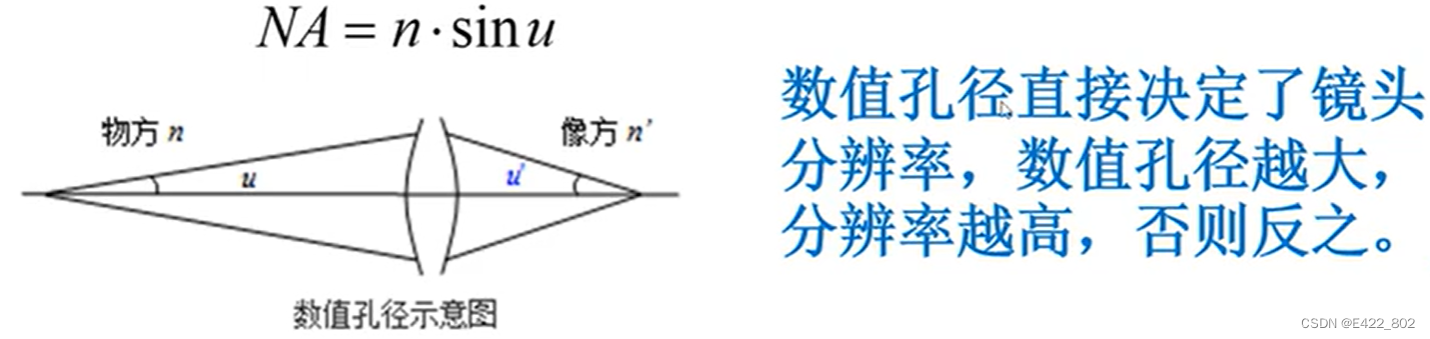
数值孔径(numerical aperture)
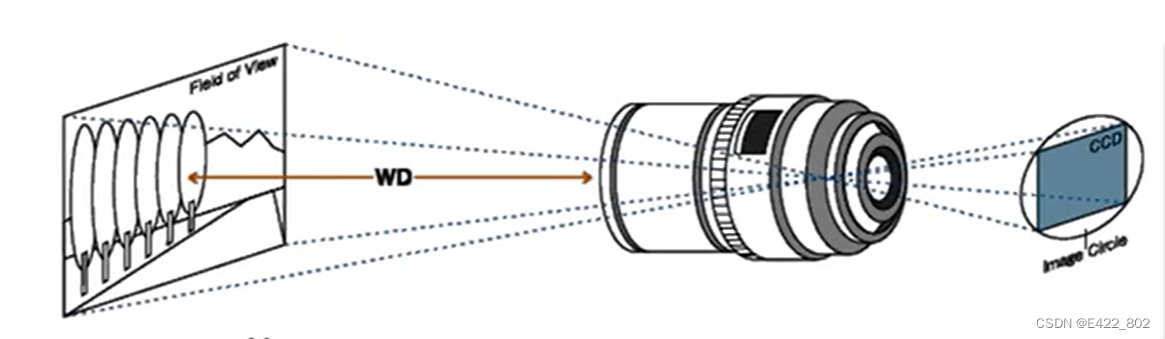
要求:镜头的成像尺寸>=摄像机芯片尺寸
否则导致成像区域不能完全利用。
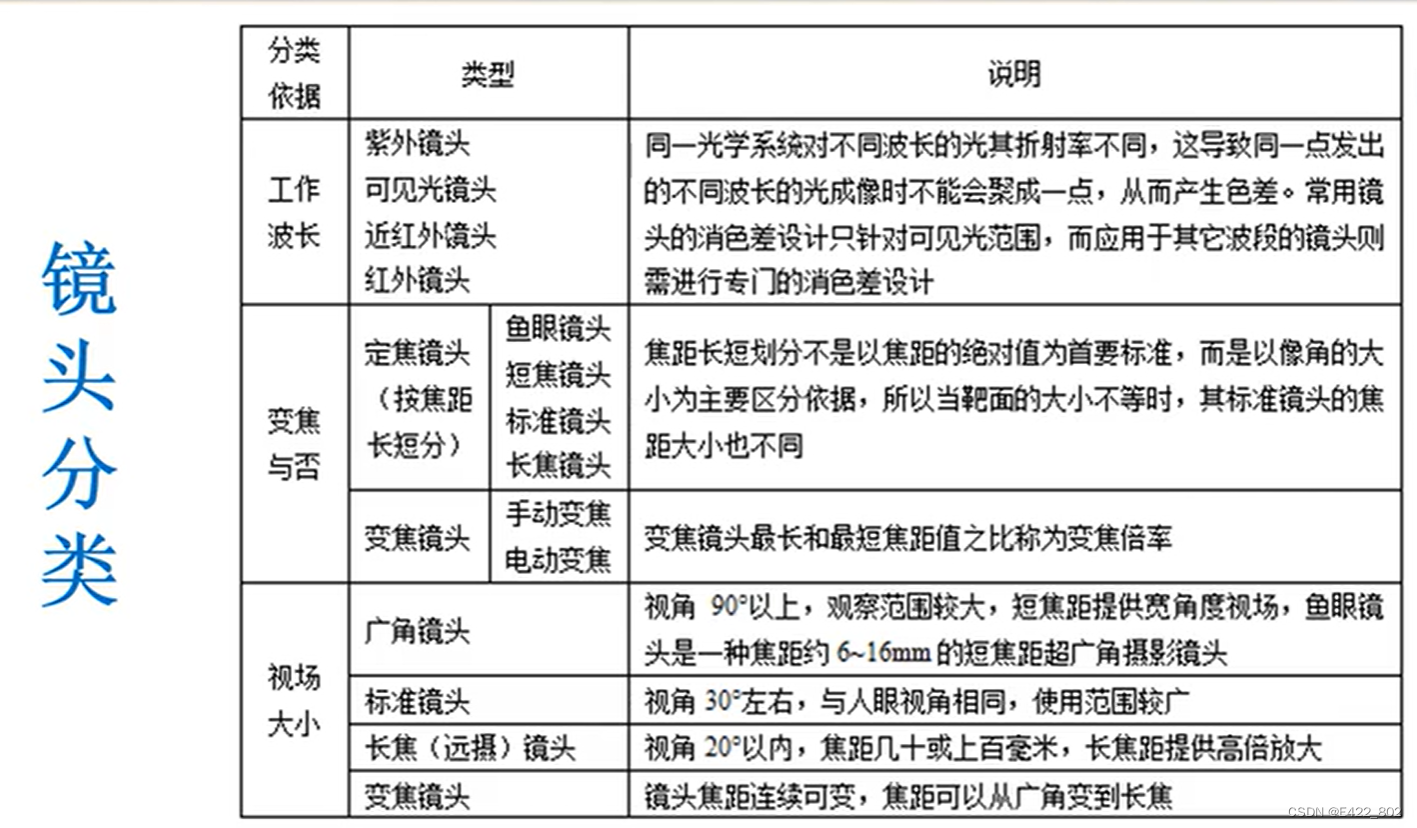
镜头按焦距分类有定焦距和变焦距
按视场分类
标准镜头 视角50度(同人眼)
广角镜头 视角90度以上,拍摄近物范围大
长焦镜头 拍摄远距离物体
微距镜头 极近距离拍摄
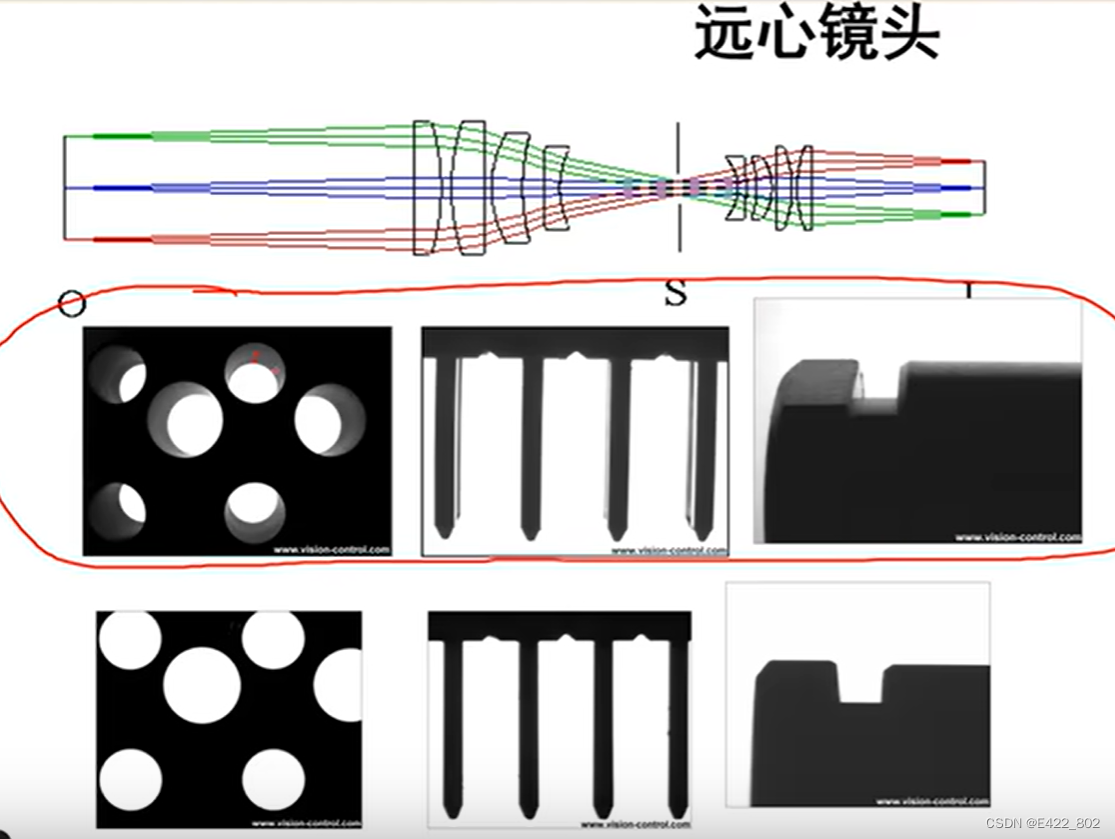
远心镜头:在一定的物距范围内,图像的放大倍率不会随物距的变化而变化。适用于被测物不在同一物面的情况。
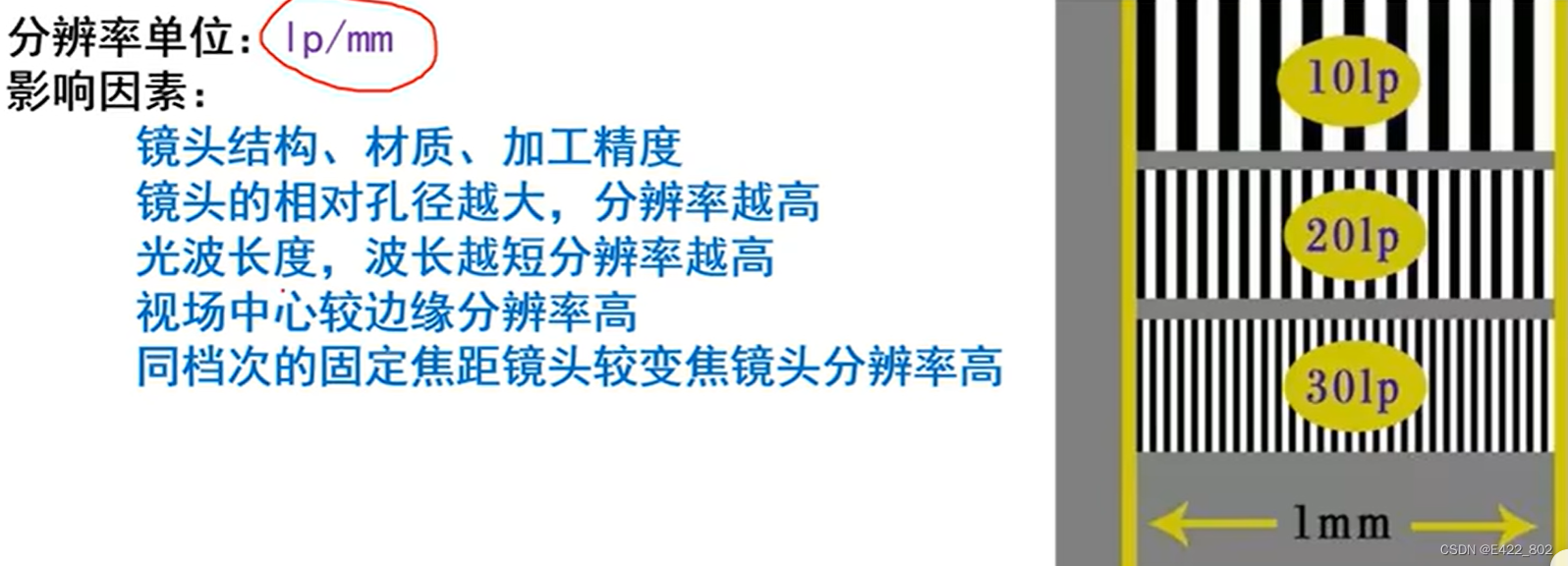
镜头分辨率:在一毫米的距离上能分辨多少个线对(白加黑为一对)。
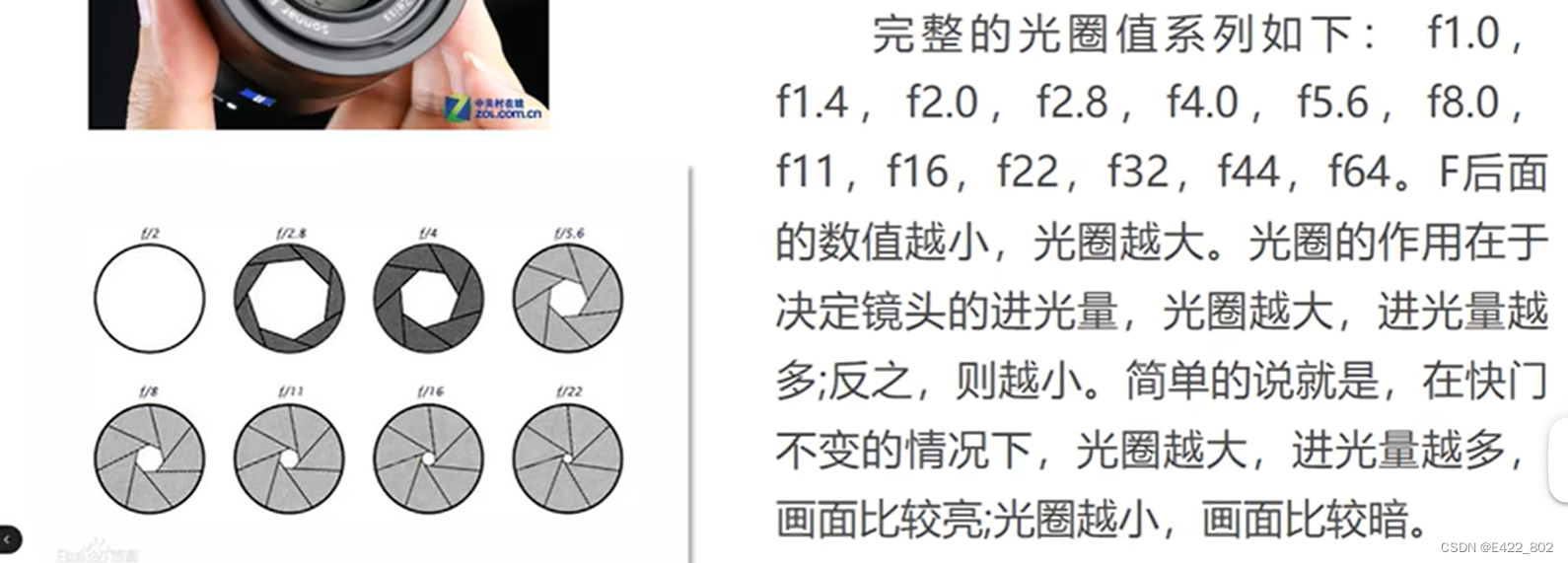
光圈
以镜头焦距f和通光孔径D的比值来衡量:F=f/D。
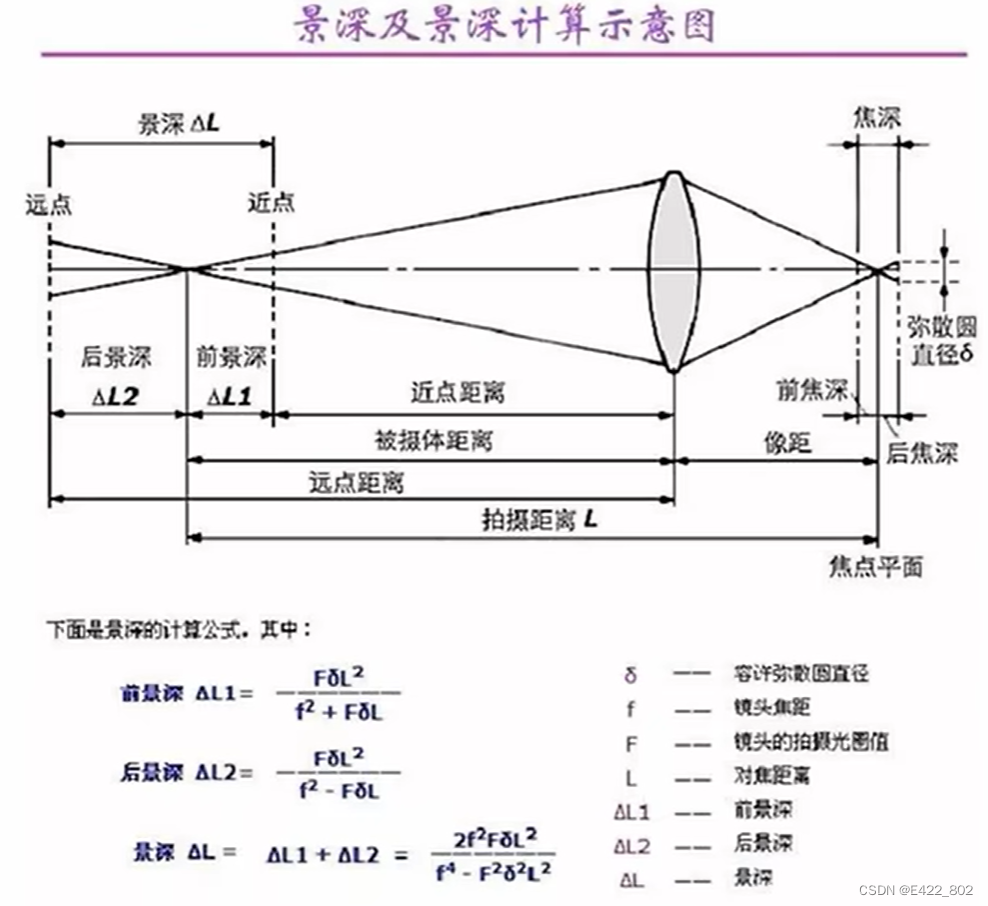
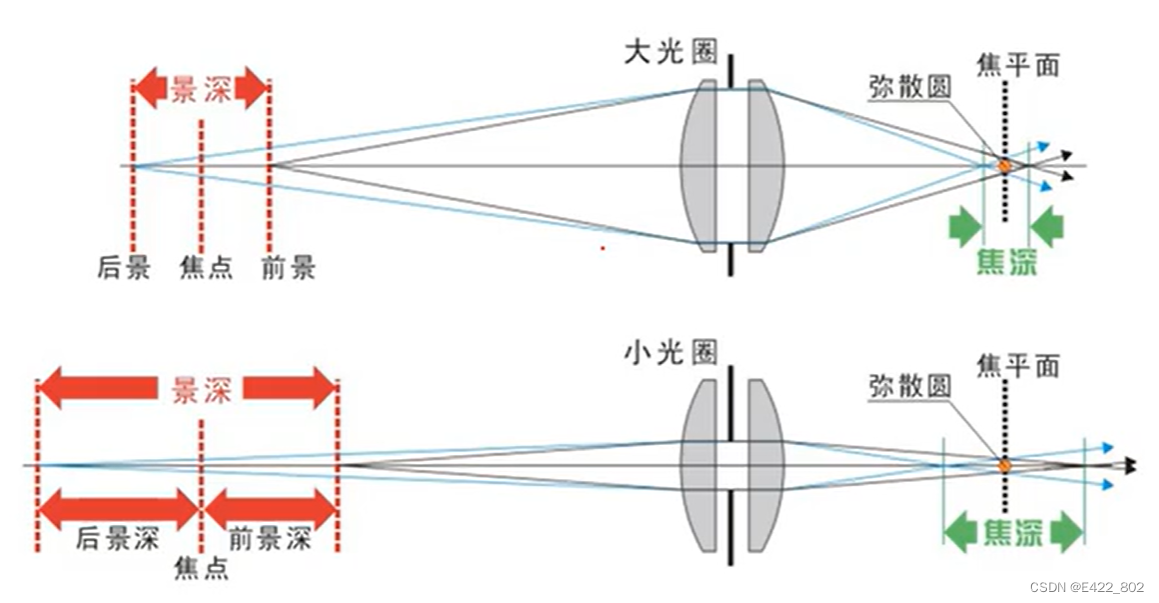
 景深:镜头能够清晰成像的距离。
景深:镜头能够清晰成像的距离。
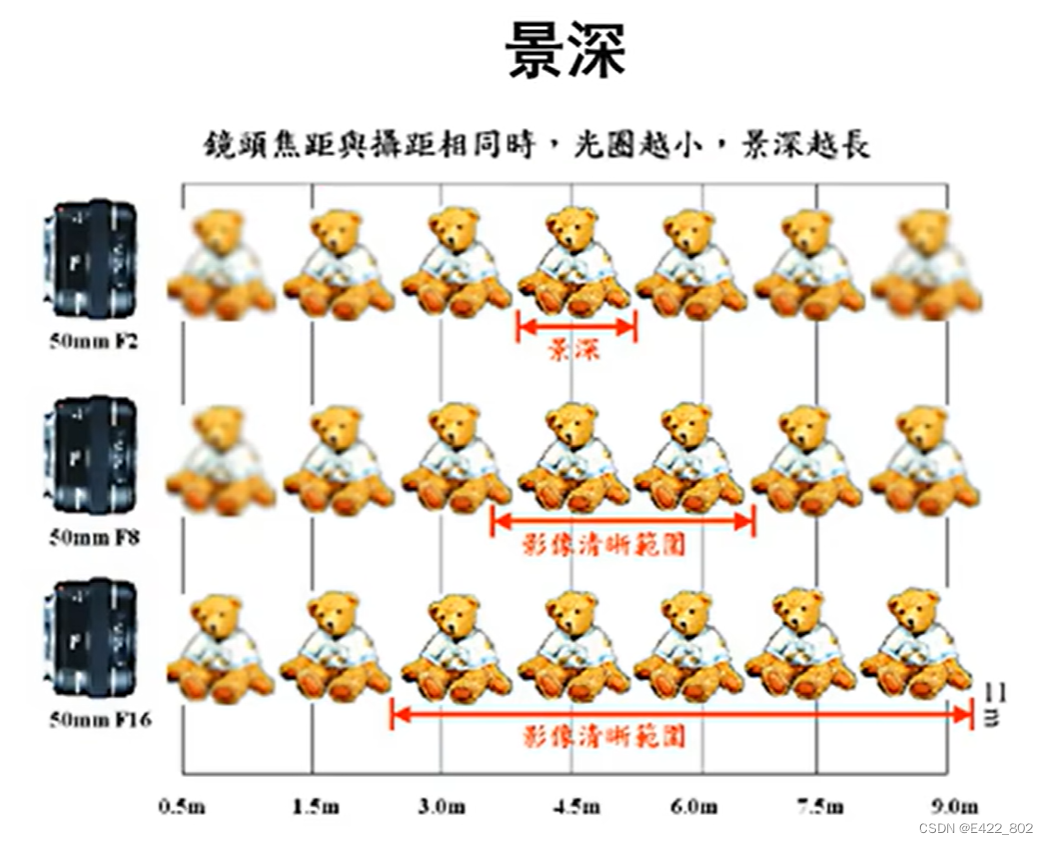
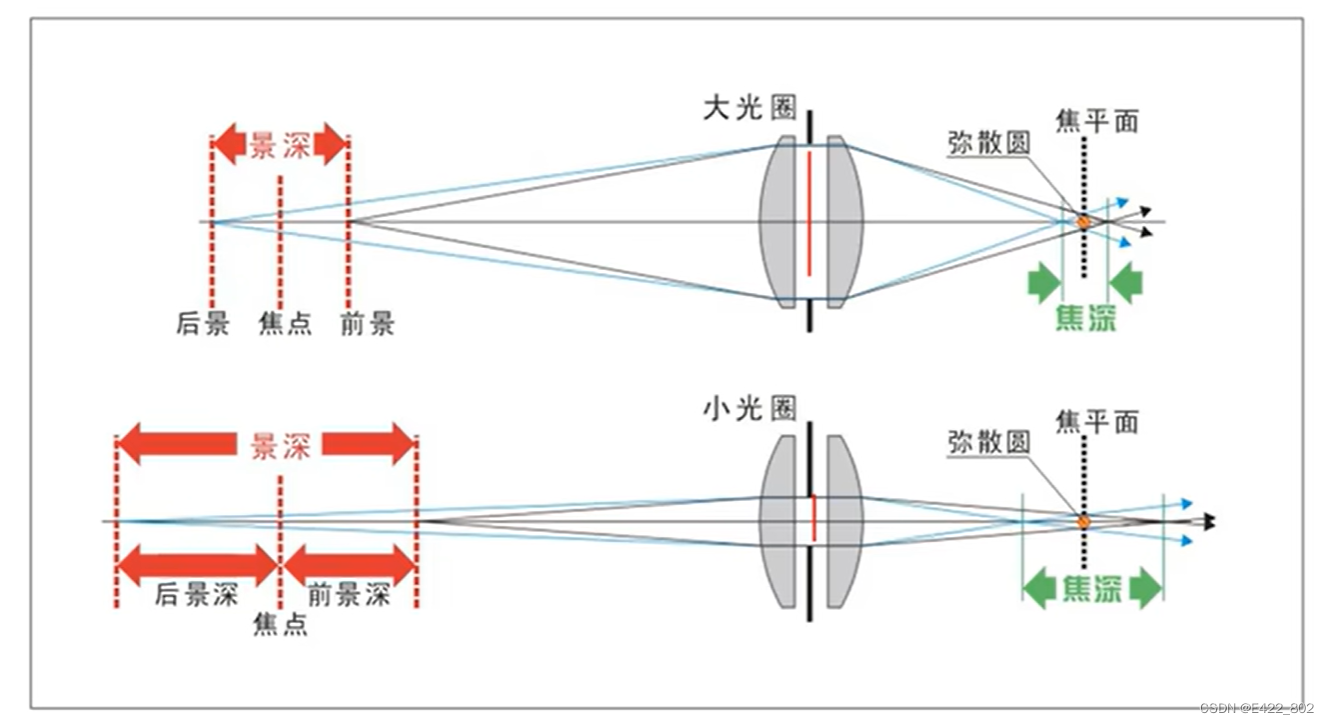
当弥散圈的大小在一个像素之内的时候,焦点即使不在焦平面上也不会影响成像的清晰度。
在能清晰成像的情况下,焦点前后移动的距离就是焦深。
焦深对应物体前后移动的距离即景深。
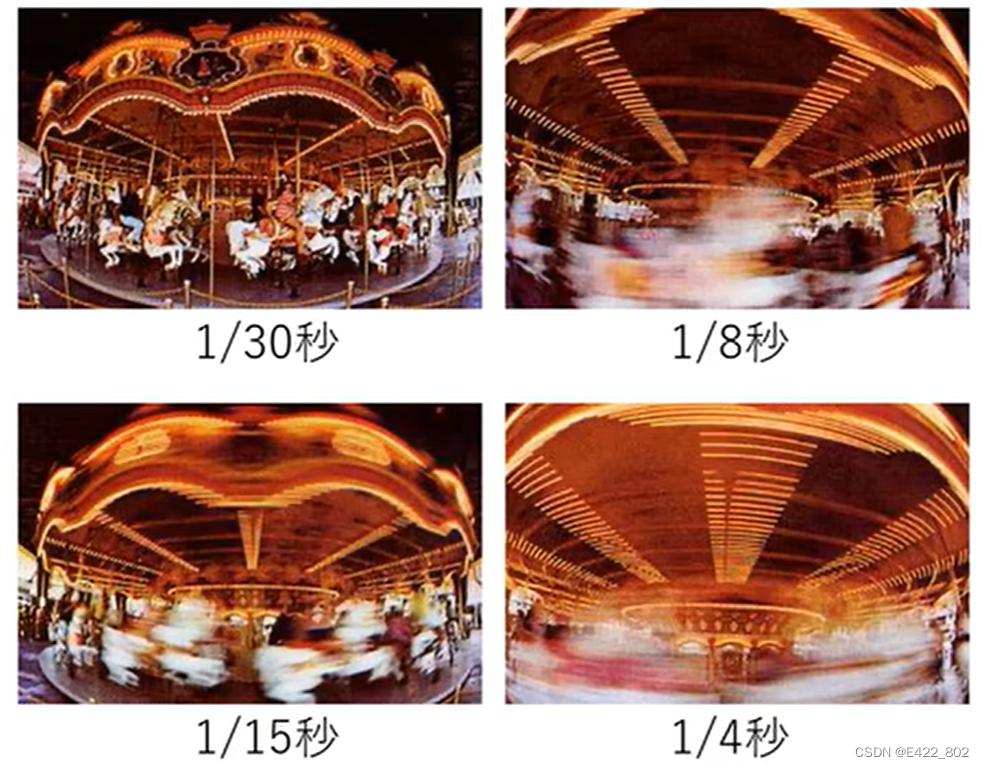
快门
快门用来控制相机曝光时间的长短。
接口

镜头接口:
C、CS、F
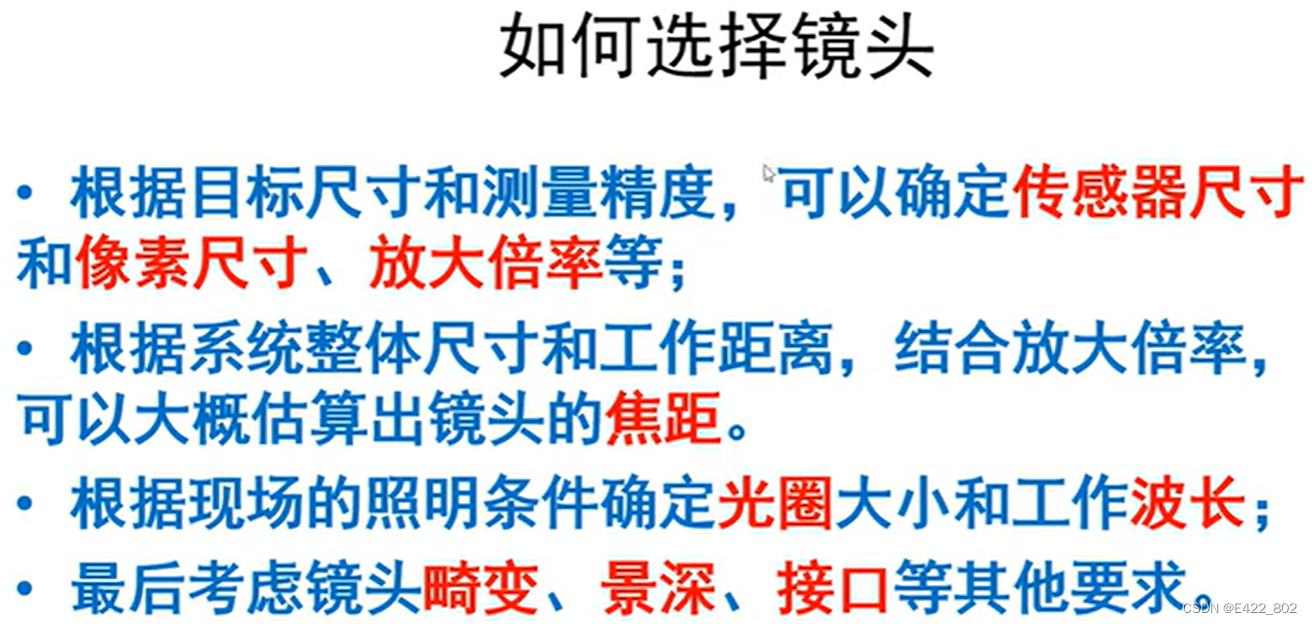
镜头的选型要考虑的方面:分辨率、焦距、光圈、景深、成像尺寸、视场角、远心。

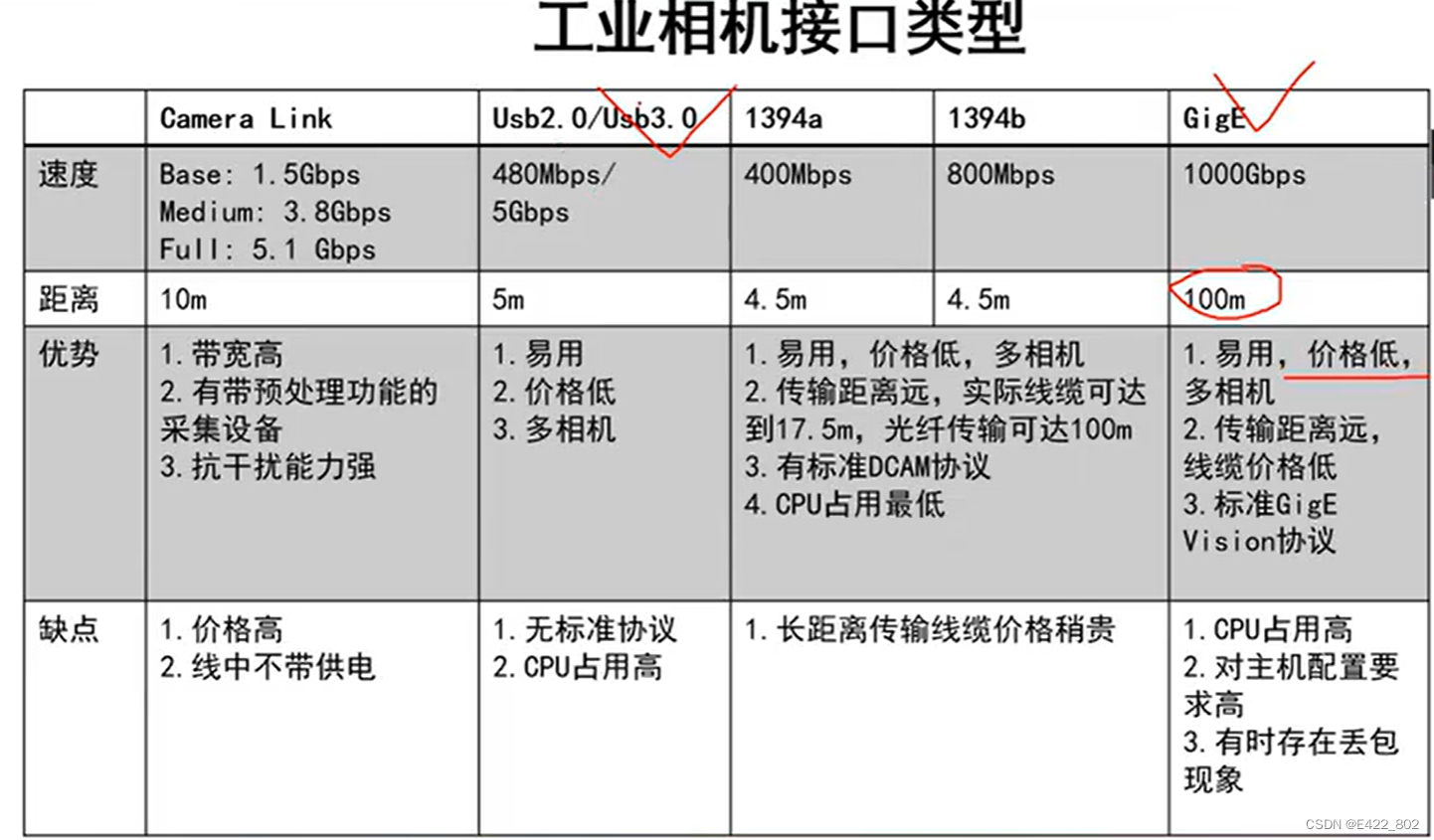
数据接口
相机
将现场影响转化为数字信号或模拟信号的工具。主要参数:分辨率、像素尺寸、帧率、像素深度、数字接口。
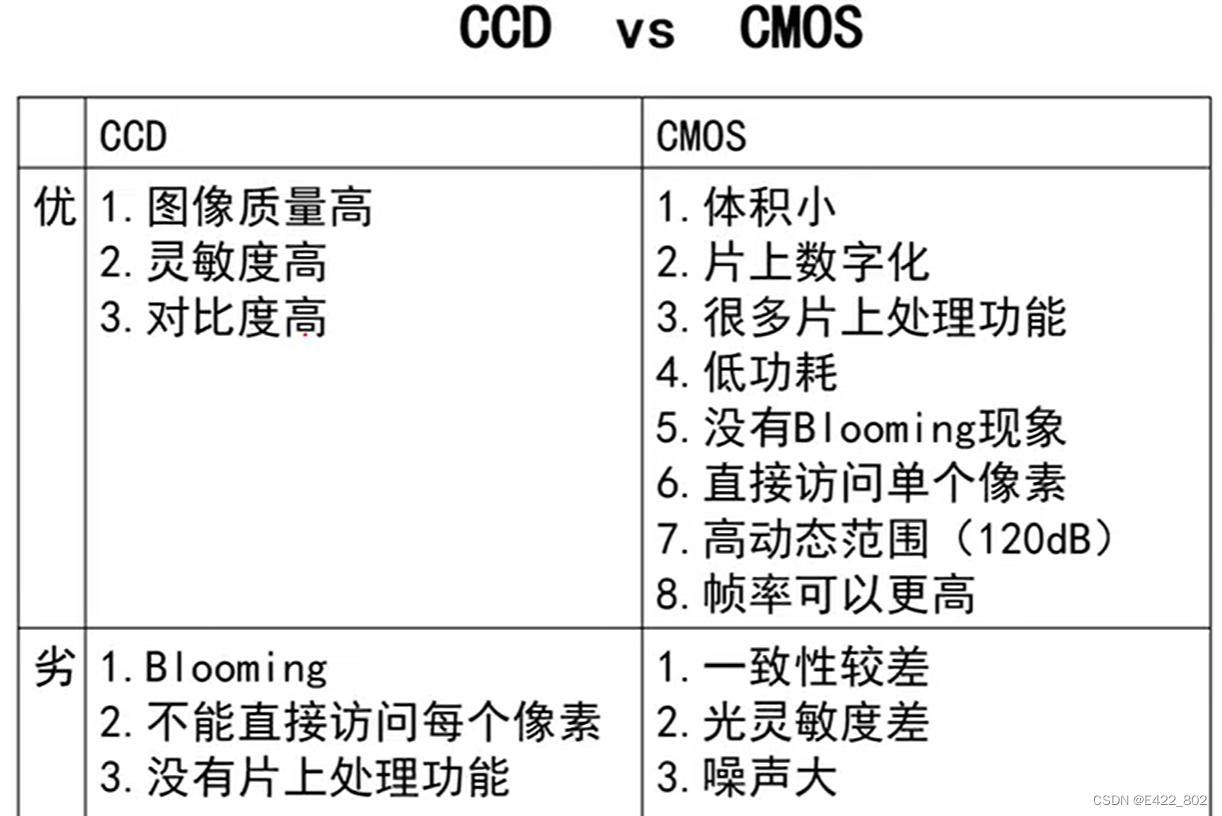
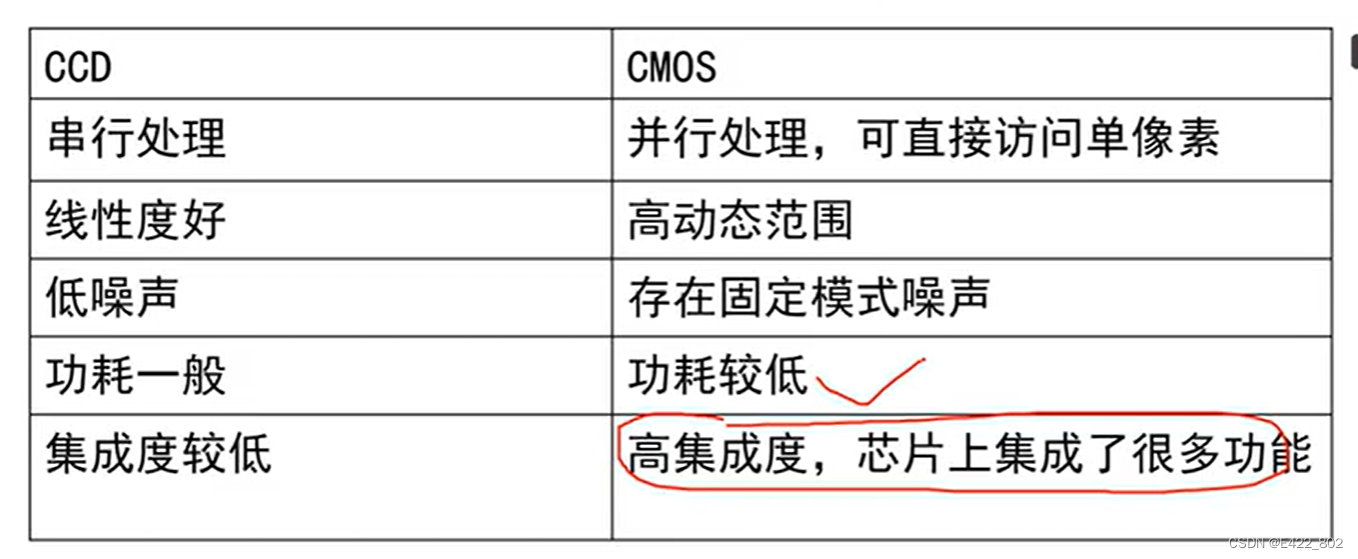
按芯片类型划分:CCD、CMOS。基本原理都是光子在感光材料下转化为电子,有相应的电路转化为信号。
面阵相机与线阵相机
面阵相机:扫面整幅图像;
线阵相机:扫描一行。

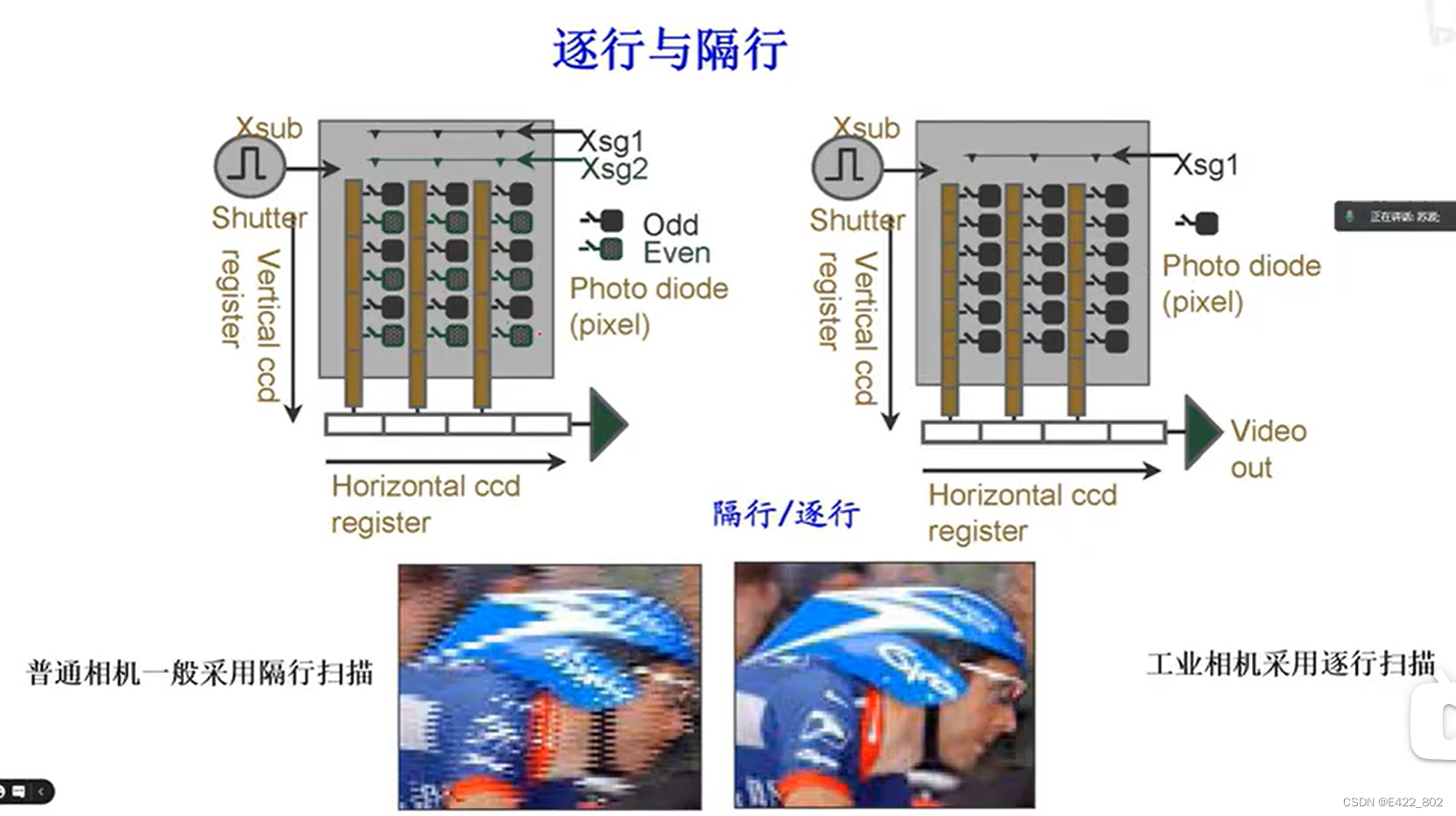
逐行扫描和隔行扫描
卷帘快门与全快门
卷帘快门所产生的图像,其不同部分的曝光不是同时发生的。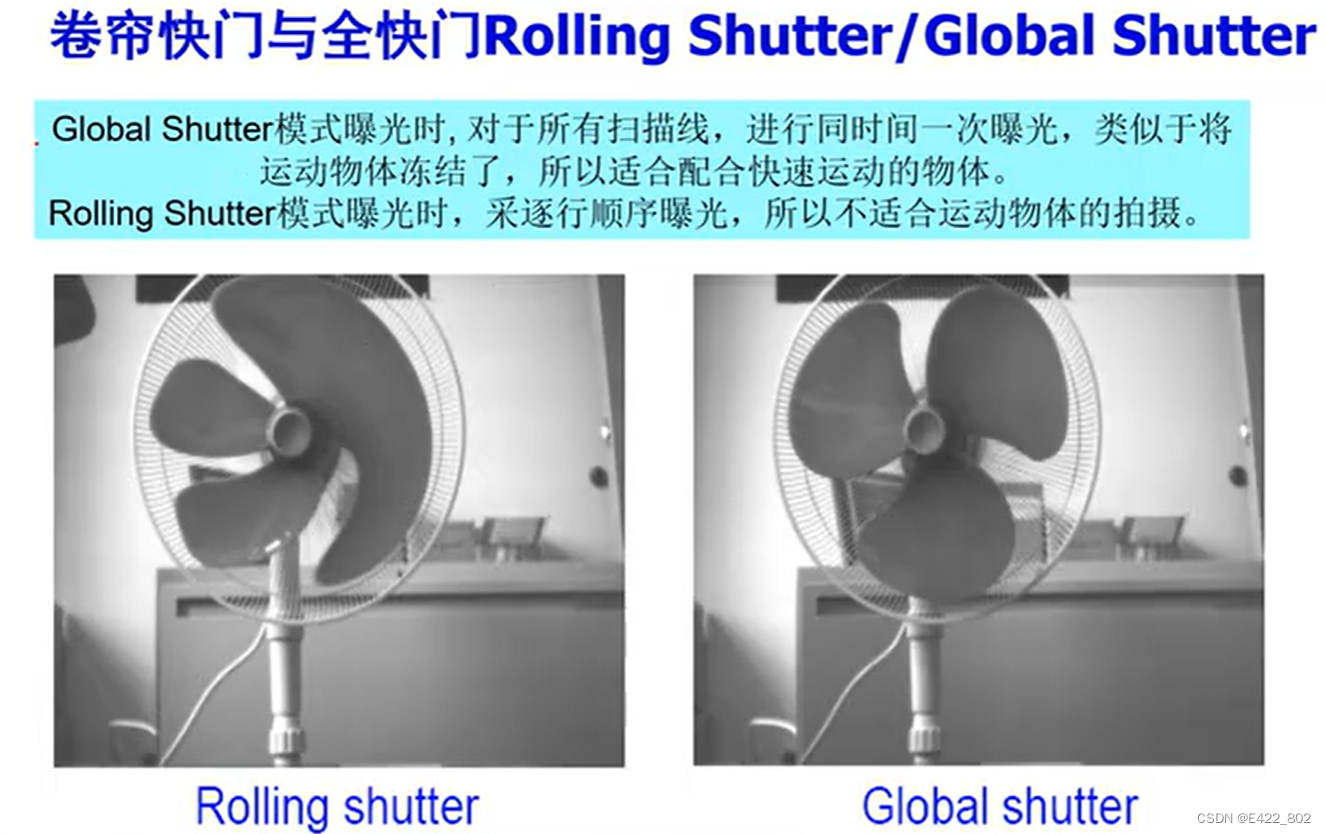
黑白与彩色
黑白:输出的图像只有一个灰度信息;
彩色:常见的输出的图像有三个色彩通道,每个通道记录对应色彩的灰度信息。
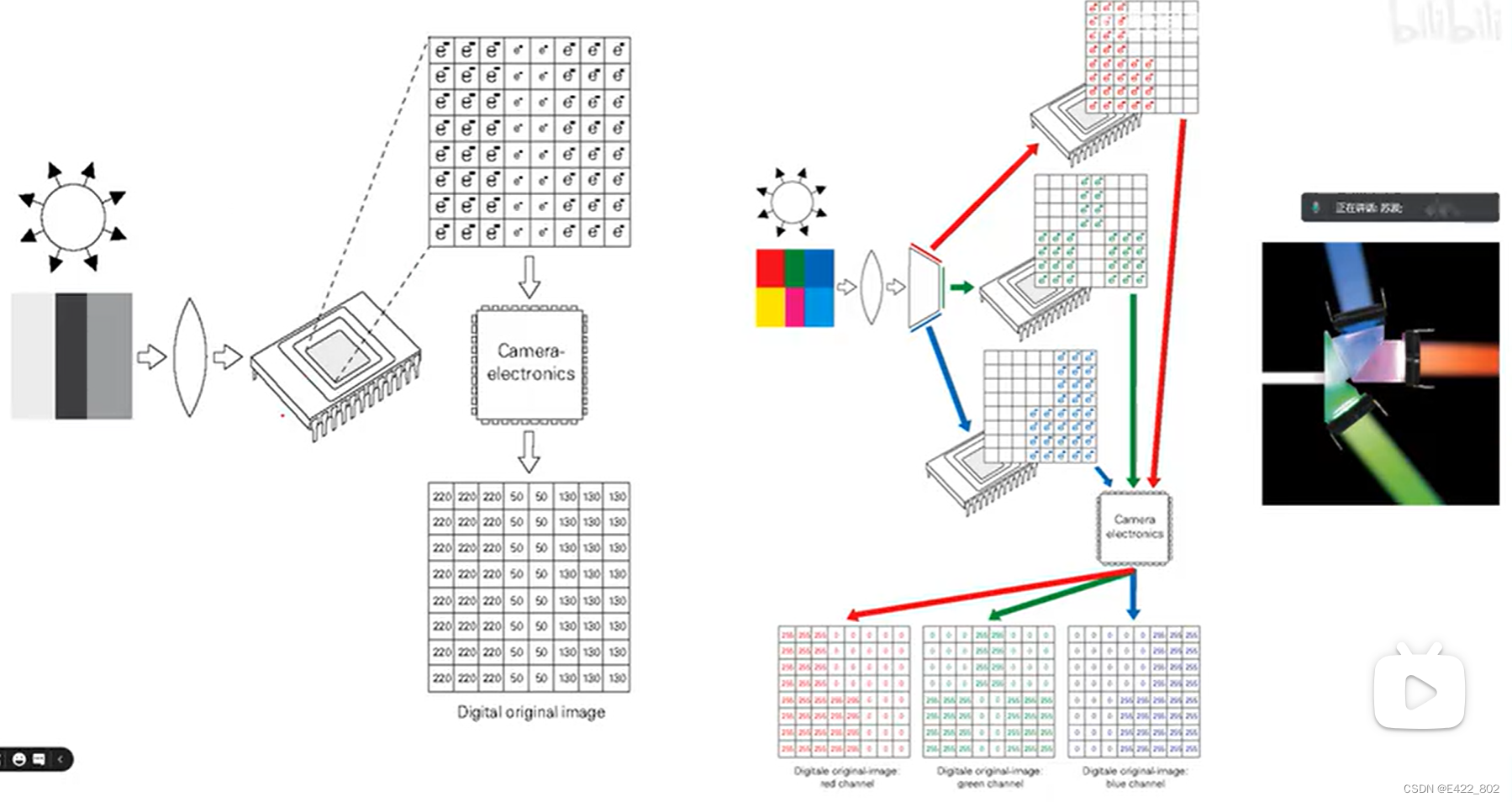
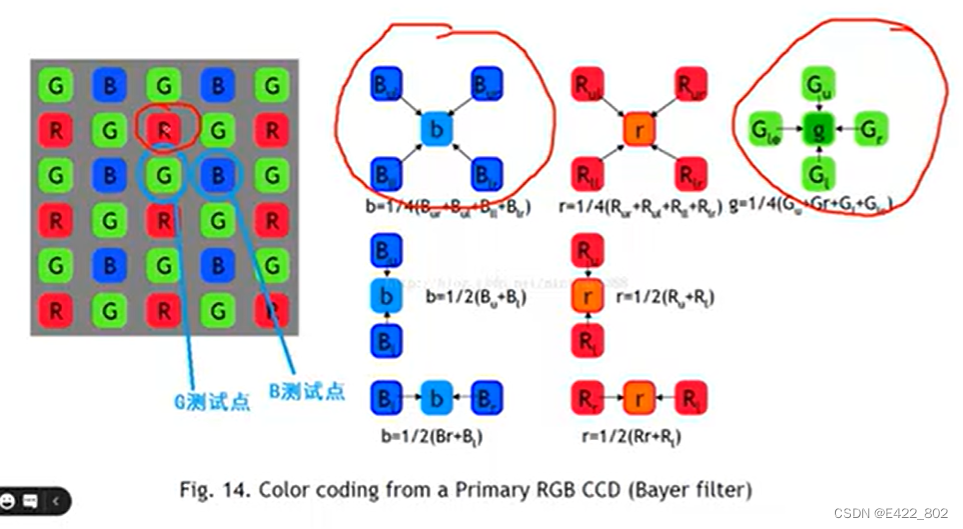
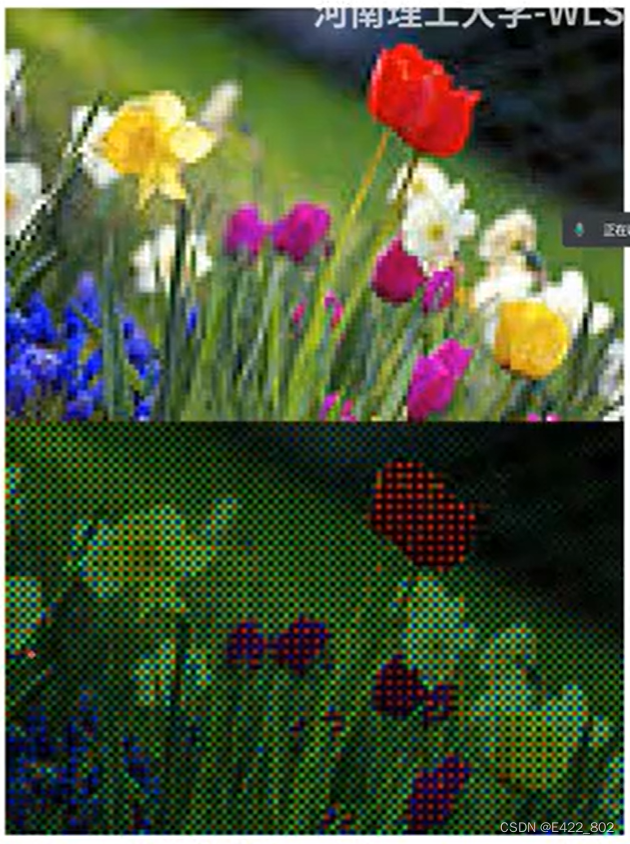
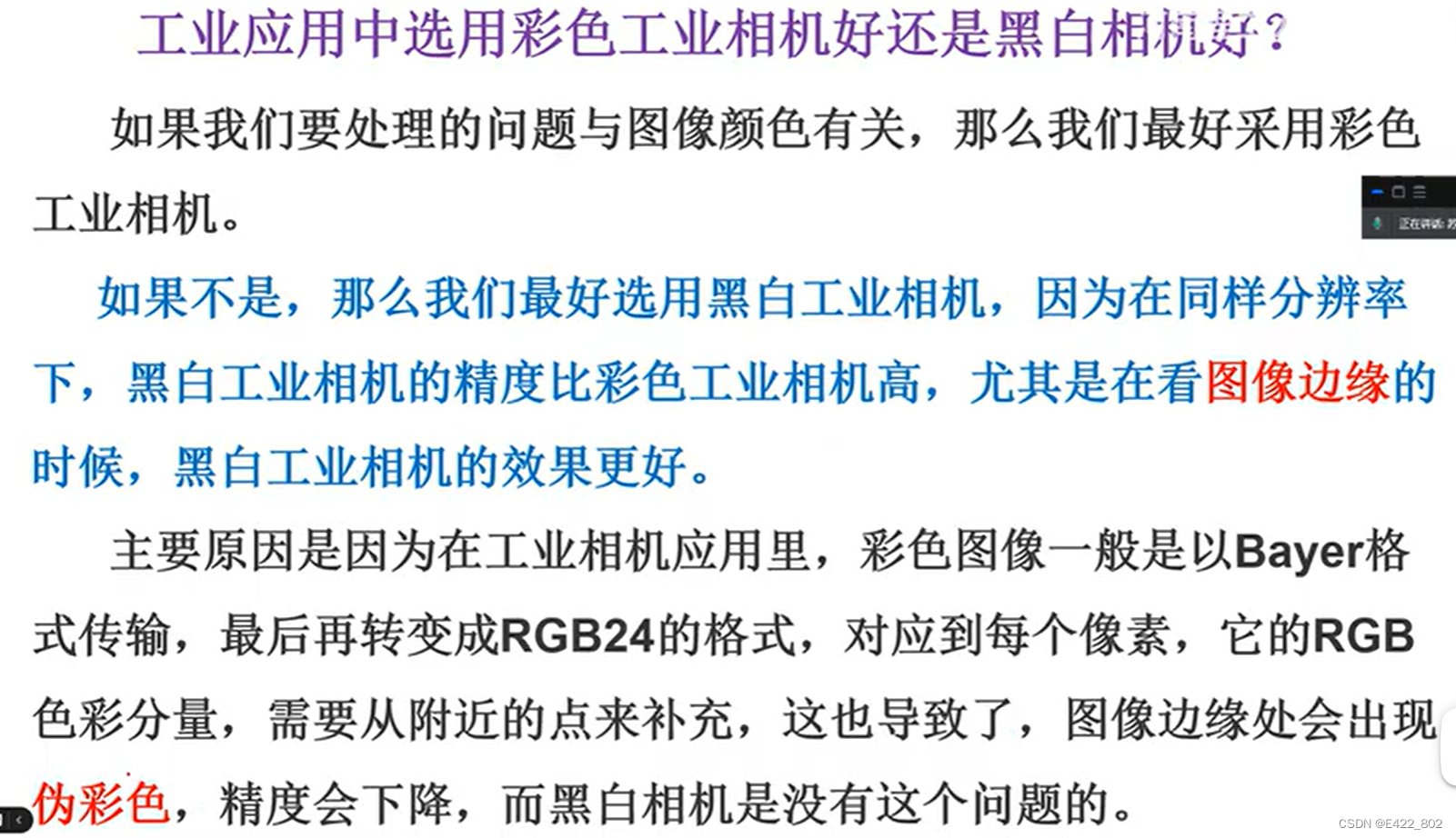
现今采用的方案是只使用一块感光芯片,用滤光片使一个像素只采集一个色彩通道的信息,通过对各个色彩通的像素的排列并使用算法,实现三个色彩通道的信息被一块芯片采集。局限性:在图像中物体的边缘部分会存在由算法导致的问题。(伪色彩、精度下降)
机器视觉的应用及展望


















 2972
2972

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









