






STM32步进电机4轴控制源码,相对,绝对,回原点,梯形加减速,运动控制,两份源码,F103,F405
ID:2810665238225945
HVASHE
STM32步进电机4轴控制源码是一个重要的技术领域,它涉及到相对和绝对运动控制、回原点、梯形加减速等关键概念。在这篇文章中,我们将详细介绍这些概念以及如何利用STM32芯片来实现步进电机的控制。
首先,我们来了解一下相对和绝对运动控制。相对运动控制是指步进电机按照一定的步长进行移动,而绝对运动控制则是指步进电机按照给定的位置进行移动。相对运动控制适用于需要相对精确控制的应用场景,比如CNC机床,而绝对运动控制适用于需要定位精度较高的应用场景,比如机器人。
回原点是步进电机控制中常见的操作,它用于将步进电机移动到事先确定的起始位置。在步进电机控制源码中,回原点操作可以通过设置电机的初始位置和逆向运动来实现。这个过程通常需要通过限位开关或者编码器等设备进行辅助。
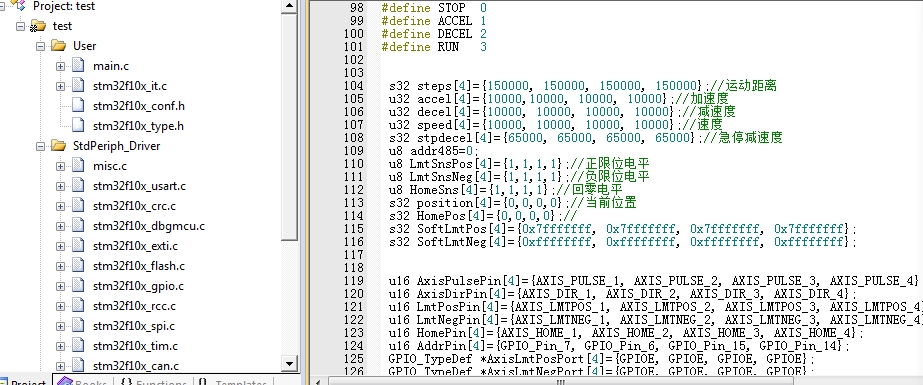
梯形加减速是步进电机控制中常用的运动控制方法,它通过逐渐增加或减小步进电机的速度来实现平稳的加速和减速过程。梯形加减速可以确保步进电机在运动过程中不会产生剧烈的震动和失步现象,从而提高了步进电机的运动精度和平滑性。
在STM32步进电机4轴控制源码中,我们提供了两份源码,分别适用于STM32F103和STM32F405芯片。这两种芯片都是常见的STM32系列芯片,具有较高的性能和稳定性。通过这些源码,开发者可以根据自己的需求选择适合的芯片,并进行相应的控制逻辑设计和程序开发。
除了上述提到的主要功能,我们的源码还提供了更多的功能和优化。比如,我们可以通过调整源码中的参数,实现步进电机的速度和加速度的调节。同时,我们还可以根据具体应用的需求,进行源码的定制和扩展,以满足不同场景下的步进电机控制需求。
综上所述,STM32步进电机4轴控制源码提供了相对和绝对运动控制、回原点、梯形加减速等功能,并且支持多种STM32芯片,可以广泛应用于机器人、CNC机床和其他步进电机控制系统。通过对源码的学习和理解,开发者可以更好地掌握步进电机控制的原理和方法,并在实际应用中进行灵活的调整和优化。希望这份源码能够为广大开发者提供帮助,推动步进电机控制技术的进一步发展。
相关的代码,程序地址如下:http://nodep.cn/665238225945.html
















 365
365

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









